Quels sont les problèmes courants rencontrés lors de l’utilisation de robots de soudage ?
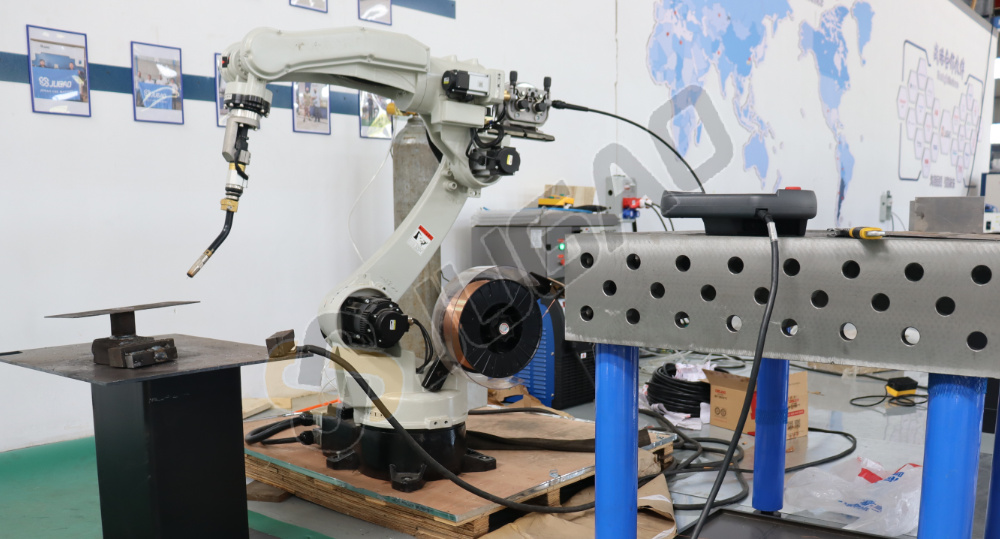
L'utilisation d'équipements de soudage robotisés permet non seulement de stabiliser et d'améliorer la qualité de la soudure ainsi que d'accroître l'efficacité de la production, mais aussi de réduire les exigences en matière de compétences des soudeurs, ce qui raccourcit le cycle de préparation des mises à niveau de produits et diminue les investissements correspondants dans les équipements. Lors de l'utilisation d'équipements de soudage robotisés, des problèmes tels que la soudure décentrée ou le manque de pénétration peuvent survenir en raison d'une mauvaise manipulation ou d'une détérioration de l'équipement. Comment résoudre ces problèmes ? Afin d'aider les utilisateurs à faire face à ces difficultés rencontrées lors de l'utilisation de robots de soudage, examinons de plus près le contenu détaillé ci-dessous.
Le soudage décentré peut être dû à une position de soudage incorrecte ou à des problèmes liés à la recherche de la torche à souder. Dans ce cas, vérifiez si le TCP (point central de la torche à souder) est correctement positionné et ajustez-le en conséquence. Si ce phénomène se produit fréquemment, contrôlez la position zéro de chaque axe du robot et procédez à une recalibration. Le manque de pénétration (« undercut ») peut résulter d’un choix inadéquat des paramètres de soudage, d’un angle ou d’une position incorrects de la torche à souder ; ces paramètres peuvent être ajustés de façon appropriée. Une protection gazeuse insuffisante, une couche de primaire trop épaisse sur la pièce à usiner ou un séchage insuffisant du gaz de protection peuvent également être à l’origine de ces défauts ; des ajustements appropriés permettront de résoudre le problème. Des projections excessives (« spatter ») peuvent être causées par des paramètres de soudage inadaptés du robot à souder, par des problèmes liés à la composition du gaz ou par une longueur excessive de fil électrode dépassant de la torche.
Le réglage de la puissance de la machine permet de modifier les paramètres de soudage, le réglage du rapport gazeux à l’aide du débitmètre gazeux et le réglage de la position relative de la torche de soudage par rapport à la pièce à souder peuvent également aider. En ce qui concerne la formation d’un cratère d’arc à l’extrémité de la soudure après refroidissement, une fonction de remplissage de cratère d’arc immergé peut être ajoutée aux étapes programmables afin de le combler. Les collisions de la torche peuvent résulter d’écarts dans l’assemblage des pièces ou d’une imprécision du point de contrôle de la torche (TCP, Torch Control Point). Vérifier l’installation ou modifier le TCP de la torche de soudage peut permettre de résoudre ce problème. Les défauts d’arc et l’impossibilité d’allumer l’arc peuvent provenir du fait que le fil de soudage ne touche pas la pièce à souder ou que les paramètres de procédé sont excessivement bas. L’alimentation manuelle du fil, le réglage de la distance entre la torche de soudage et la soudure ou encore l’ajustement des paramètres de procédé peuvent alors permettre de remédier à ces problèmes.
Une alarme peut indiquer un problème au niveau du système de surveillance du gaz de protection, de l’eau de refroidissement ou de l’alimentation en gaz de protection. Il est essentiel de vérifier les circuits d’eau de refroidissement ou de gaz de protection. Les techniques de programmation des robots de soudage doivent privilégier une séquence de soudage rationnelle afin de minimiser la déformation liée au soudage et de déterminer la longueur du parcours de la torche à souder. Les transitions spatiales de la torche à souder exigent une trajectoire de déplacement courte et fluide. Pour optimiser les paramètres de soudage, des pièces d’essai sont fabriquées afin de réaliser des expérimentations de soudage et de valider le procédé. Une orientation appropriée du positionneur, une posture adéquate de la torche à souder ainsi qu’une position correcte de celle-ci par rapport à la jointure sont adoptées. Une fois la pièce fixée sur le positionneur, si la soudure ne se trouve pas dans la position et l’angle idéaux, le positionneur doit être ajusté en continu pendant la phase de programmation afin d’assurer que la soudure atteigne progressivement une position horizontale, conformément à la séquence de soudage.
Parallèlement, les positions des axes du robot doivent être ajustées en continu afin de déterminer de façon appropriée la position, l’angle et la longueur d’extension de la tige d’apport de la torche à souder par rapport à la jointure. Une fois la position de la pièce déterminée, la position de la torche à souder par rapport à la jointure doit être observée visuellement par le programmeur, ce qui s’avère assez difficile. Des programmes de nettoyage de la torche à intervalles réguliers sont essentiels. Après avoir rédigé un programme de soudage d’une certaine longueur, un programme de nettoyage de la torche doit être saisi sans délai afin d’éviter que les projections de soudage n’obstruent la buse de soudage et la pointe de contact, garantissant ainsi la propreté de la torche, prolongeant la durée de vie de la buse, assurant une ignition fiable de l’arc et réduisant les projections de soudage. La programmation ne peut généralement pas être achevée en une seule étape ; elle nécessite des vérifications et des modifications continues pendant le soudage robotisé, notamment l’ajustement des paramètres de soudage et de la posture de la torche à souder, afin d’élaborer un bon programme. Le personnel utilisant des robots de soudage doit prendre des précautions pour éviter les dommages matériels, la baisse de rendement et autres problèmes. Si de tels problèmes surviennent, les utilisateurs peuvent consulter les directives pertinentes relatives à la planification et à la maintenance afin de garantir le fonctionnement normal du robot de soudage et de répondre aux besoins d’un plus grand nombre d’utilisateurs.