Welche häufig auftretenden Probleme treten bei der Nutzung von Schweißrobotern auf?
Der Einsatz von Schweißrobotern kann nicht nur die Schweißqualität stabilisieren und verbessern sowie die Produktionseffizienz steigern, sondern auch die erforderlichen Fertigkeiten der Schweißer reduzieren, wodurch der Vorbereitungszeitraum für Produktaktualisierungen verkürzt und die entsprechenden Investitionen in Ausrüstung gesenkt werden. Bei Verwendung von robotergestützten Schweißanlagen können aufgrund unsachgemäßer Bedienung oder Geräteschäden Probleme wie zentrisch falsch positionierte Schweißnähte oder Einschmelzungen (Undercut) auftreten. Wie sollten diese Probleme daher behoben werden? Um Anwender bei der Bewältigung dieser im Einsatz von Schweißrobotern auftretenden Probleme zu unterstützen, betrachten wir im Folgenden den konkreten Inhalt genauer.
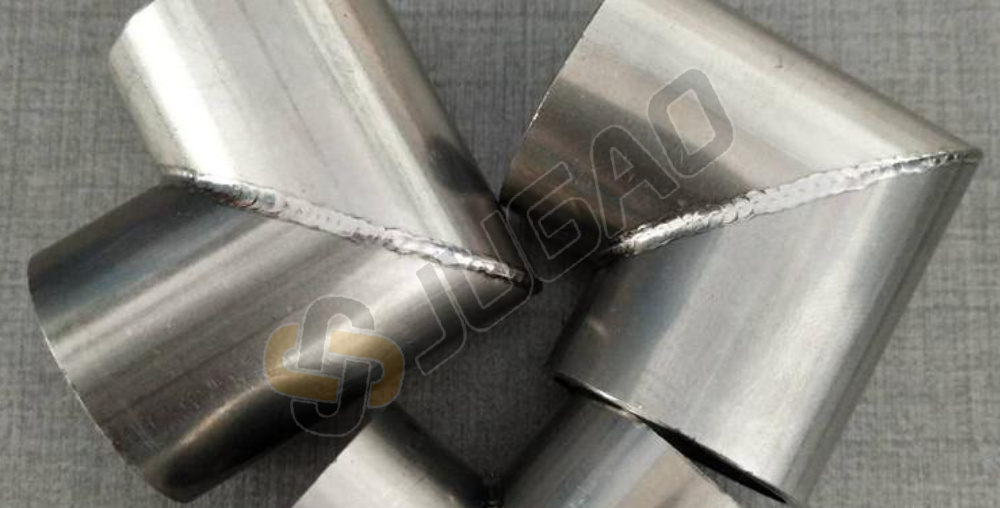
Eine exzentrische Schweißnaht kann auf eine falsche Schweißposition oder Probleme bei der Suchfunktion der Schweißpistole zurückzuführen sein. In diesem Fall sollte überprüft werden, ob die TCP-Position (Position des Mittelpunkts der Schweißpistole) korrekt ist, und gegebenenfalls entsprechend angepasst werden. Falls dies häufig vorkommt, sollten die Nullpositionen aller Roboterachsen überprüft und der Roboter neu kalibriert werden. Eine Einschmelzung (Undercut) kann durch eine unzureichende Auswahl der Schweißparameter, einen falschen Schweißpistolenwinkel oder eine falsche Schweißpistolenposition verursacht werden; diese Faktoren können entsprechend angepasst werden. Eine unzureichende Gasabschirmung, eine zu dicke Grundierung auf dem Werkstück oder eine unzureichende Trocknung des Schutzgases können ebenfalls auf diese Ursachen zurückzuführen sein; entsprechende Anpassungen lösen das Problem. Übermäßiges Spritzeranfall kann durch ungeeignete Schweißparameter des Schweißroboters, Probleme mit der Gaszusammensetzung oder eine zu lange Drahtvorschublänge verursacht werden.
Die Anpassung der Maschinenleistung kann die Schweißparameter verändern; die Einstellung des Gasverhältnisses mittels des Gaszählers sowie die Anpassung der relativen Position von Schweißbrenner und Werkstück können ebenfalls helfen. Für das Problem eines nach dem Abkühlen am Schweißende entstehenden Lichtbogenkraters kann eine Funktion zum Untertauchen des Kraters in die programmierbaren Schritte integriert werden, um diesen zu füllen. Kollisionen des Brenners können auf Montageabweichungen des Werkstücks oder eine ungenaue TCP-Einstellung (Torch Control Point) des Schweißbrenners zurückzuführen sein. Eine Überprüfung der Montage oder eine Korrektur der TCP-Einstellung des Schweißbrenners kann hier Abhilfe schaffen. Lichtbogenfehler und das Versagen des Lichtbogenzündens können darauf beruhen, dass der Schweißdraht das Werkstück nicht berührt oder die Prozessparameter zu niedrig eingestellt sind. Manuelles Zuführen des Schweißdrahts, die Anpassung des Abstands zwischen Schweißbrenner und Schweißnaht oder die Anpassung der Prozessparameter können hier weiterhelfen.
Ein Alarm kann auf ein Problem mit dem Abschirmgas-Überwachungssystem, dem Kühlwasser oder der Abschirmgasversorgung hinweisen. Die Überprüfung der Kühlwasser- oder Abschirmgasleitungen ist entscheidend. Bei der Programmierung von Schweißrobotern sollten geeignete Schweißsequenzen gewählt werden, um die Schweißverformung zu minimieren, und der Weg des Schweißbrenners muss festgelegt werden. Räumliche Übergänge des Schweißbrenners erfordern eine kurze und gleichmäßige Bewegungsbahn. Um die Schweißparameter zu optimieren, werden Probekörper für Schweißversuche und Prozessverifikationen hergestellt. Es werden eine geeignete Positioniererausrichtung, eine optimale Schweißbrennerhaltung sowie eine passende Position des Schweißbrenners relativ zur Naht gewählt. Nachdem das Werkstück am Positionierer fixiert ist, muss dieser während der Programmierung kontinuierlich justiert werden, falls die Schweißnaht nicht in der idealen Position und unter dem idealen Winkel liegt, um sicherzustellen, dass die Schweißnaht gemäß der Schweißsequenz schrittweise eine horizontale Lage erreicht.
Gleichzeitig müssen die Achspositionen des Roboters kontinuierlich angepasst werden, um die Position, den Winkel und die Drahtvorlauflänge der Schweißpistole relativ zur Fügeverbindung angemessen zu bestimmen. Nachdem die Position des Werkstücks ermittelt wurde, muss die Position der Schweißpistole relativ zur Fügeverbindung visuell durch den Programmierer überprüft werden – was äußerst schwierig ist. Zeitgerechte Reinigungsprogramme für die Schweißpistole sind unerlässlich. Nach dem Schreiben eines Schweißprogramms einer bestimmten Länge sollte unverzüglich ein Reinigungsprogramm für die Schweißpistole eingegeben werden, um zu verhindern, dass Spritzer die Schweißdüse und die Kontaktspitze verstopfen; dies gewährleistet die Sauberkeit der Schweißpistole, verlängert die Lebensdauer der Düse, sichert eine zuverlässige Lichtbogenzündung und reduziert das Auftreten von Spritzern. Die Programmierung kann im Allgemeinen nicht in einem einzigen Schritt abgeschlossen werden; sie erfordert eine ständige Überprüfung und Anpassung während des Roboter-Schweißens – etwa durch die Justierung der Schweißparameter und der Positionierung der Schweißpistole –, um ein gutes Programm zu erstellen. Das Personal, das Schweißroboter bedient, muss Vorsichtsmaßnahmen ergreifen, um Schäden an der Ausrüstung, eine verringerte Arbeitseffizienz und andere Probleme zu vermeiden. Falls derartige Probleme dennoch auftreten, können die Anwender auf entsprechende Richtlinien für Planung und Wartung zurückgreifen, um sicherzustellen, dass der Schweißroboter weiterhin normal betrieben werden kann und den Anforderungen einer wachsenden Nutzerzahl gerecht wird.