















































المشاكل الشائعة في عملية لحام الروبوتات
يتأثر أداء اللحام بالروبوتات بعدة عوامل. ويواجه العديد من العملاء مشاكل متنوعة قبل أن يكتسبوا الكفاءة في استخدام روبوتات اللحام. وتنشأ هذه المشاكل عمومًا عن تشغيل غير سليم أو إعدادات غير مناسبة للروبوت، ويمكن حلها عبر إجراء تعديلات مناسبة. وفيما يلي نستعرض بعض المشكلات الشائعة التي تظهر أثناء استخدام روبوتات اللحام وحلولها.
أولًا: فشل إشعال القوس أثناء اللحام
١. لم يُشعل القوس بعدُ

السبب: يفتقر البرنامج إلى أمر مُقابل لإشعال القوس قبل تنفيذ أمر إطفاء القوس.
الحل: تحقق مما إذا كان قد تم إضافة أمر إضافي لإنهاء القوس أو أمر إضافي لبدء القوس.
٢. فشل بدء القوس، خطأ في اكتشاف الإشارة

طريقة حل المشاكل:
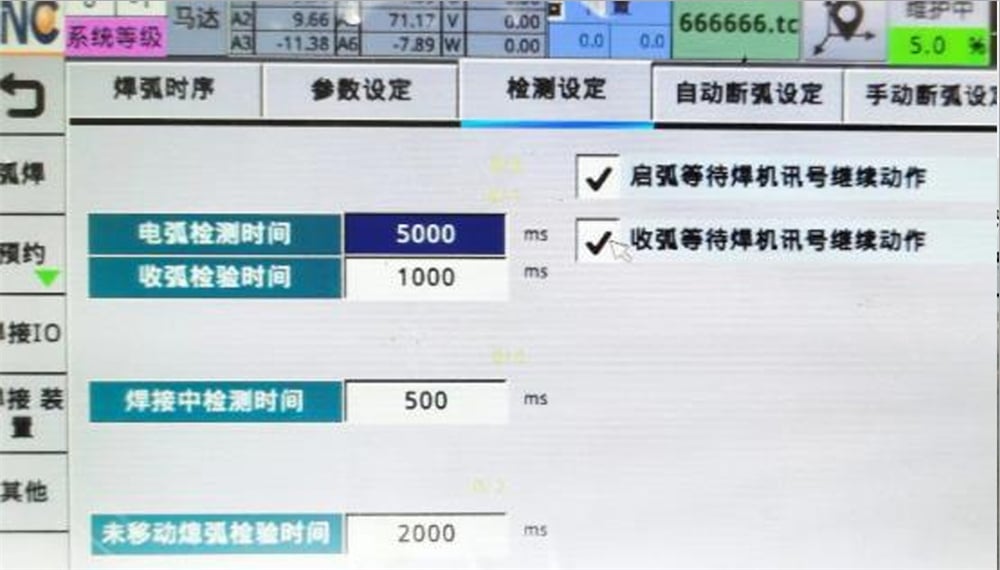
١) تحقق من إعداد زمن انقطاع اللحام في صفحة المعايير. وعمومًا، فإن الإعداد الزمني البالغ ٥٠٠٠ مللي ثانية يكون مناسبًا.
٢) تحقق مما إذا كانت إشارة جهاز اللحام تُرسل إلى النظام بنجاح.
٣) تحقق مما إذا كان قطعة العمل متصلةً بالأرض (مُأرضة).
٣. حدوث قوس كهربائي وانقطاع السلك
الأسباب:
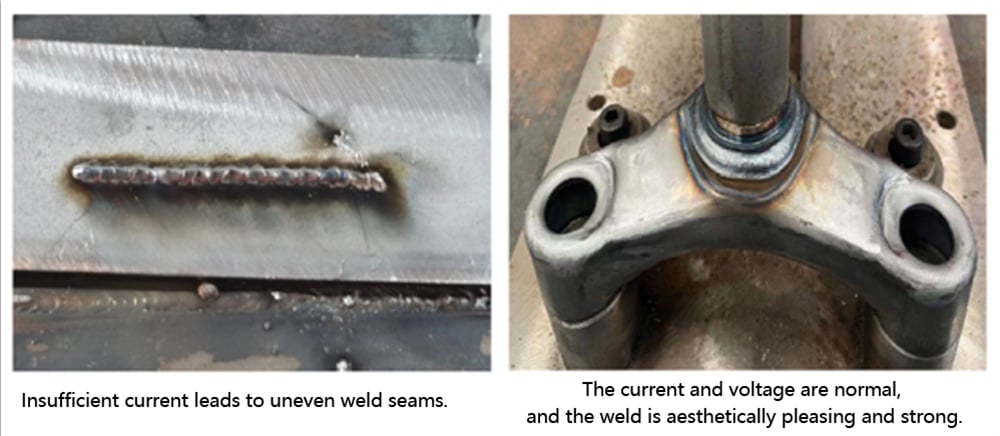
١) عدم تطابق التيار والجهد
الحل: يجب علينا ضبط التيار والجهد المناسبين وفقًا للسماكة الفعلية لقطعة العمل وجهاز اللحام.
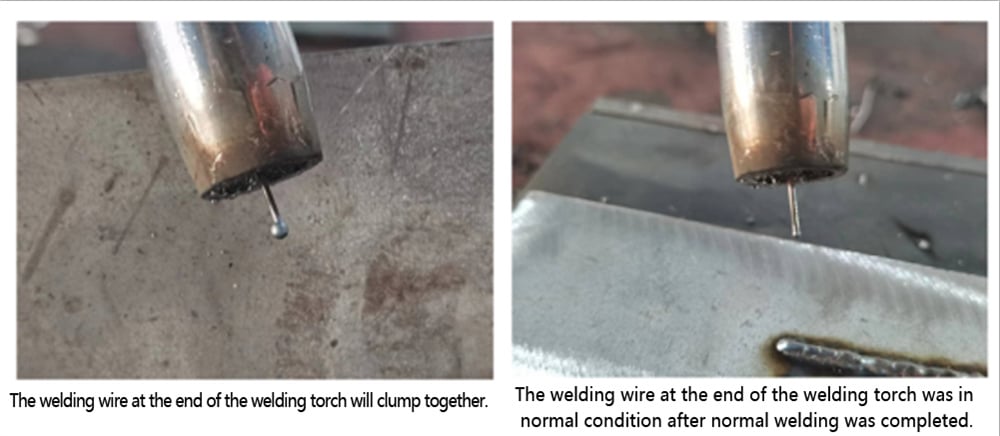
٢) طول سلك اللحام طويلٌ جدًّا.
الحل: عمومًا، يجب أن يكون طول امتداد سلك اللحام ما بين ١٠ إلى ١٥ ضعف قطر سلك اللحام. اختر طول سلك لحام مناسبًا وفقًا لقطر سلك اللحام.
٤. يحدث إطفاء قوسي تلقائي بعد اشتعال القوس.

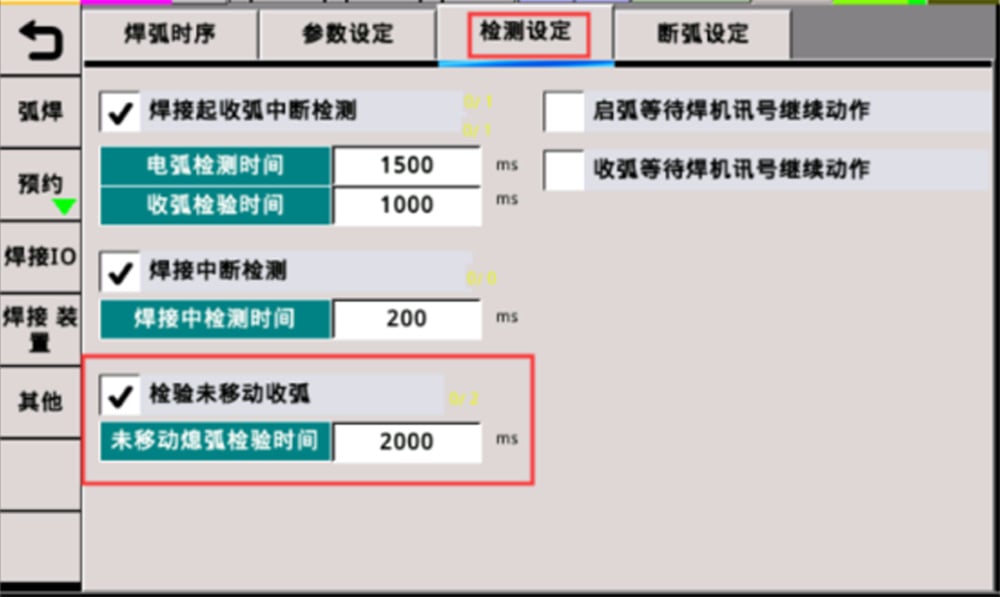
استكشاف الأخطاء وإصلاحها: تحقق مما إذا كانت هناك مشكلة في إعداد زمن المعلمة، وتحقق مما إذا كانت ماسكة اللحام قد تحركت.
ثانياً. انقطاع القوس أثناء عملية اللحام.
الأسباب:
١. لا يلامس سلك اللحام القطعة المراد لحامها، ما يؤدي إلى تشغيل إنذار انقطاع القوس.
الحل: أعد ضبط موضع سلك اللحام والقطعة المراد لحامها لضمان التماس الكامل بينهما أثناء اللحام. (مع مراعاة ألا يكون السلك قريبًا جدًّا من القطعة المراد لحامها، لأن ذلك قد يؤدي إلى اختراقها.)
٢. مسار اللحام غير المناسب يتسبب في اصطدام ماسكة اللحام وارتفاعها التلقائي.
الحل: أعد ضبط مسار اللحام.
٣. تماس سيئ بين القطبَين الموجب والسالب لجهاز اللحام.
الحل: تحقق من توصيلات القطبَين الموجب والسالب.
ثالثاً. أسباب فشل إيقاف القوس بعد الانتهاء من اللحام:
١. فشل في إنهاء القوس الكهربائي بسبب خطأ في اكتشاف الإشارة.
السبب: لم تتلقَّ آلة اللحام إشارةً من الروبوت، ما تسبب في فشل الروبوت في إنهاء القوس الكهربائي.
التعامل مع الأعطال:
(١) تحقق من معقولية معايير الإعداد.
(٢) تحقق من إشارات الإدخال/الإخراج (IO)، وما إذا كانت إشارة نقطة الإدخال (I-point) الخاصة بإنهاء القوس غير طبيعية. فإذا ظهرت إشارة نقطة الإدخال دائمًا على وضع التشغيل (ON)...
(٣) تحقق مما إذا كان هناك قصر كهربائي في الدائرة، وما إذا كانت سلك التأريض متصلًا بشكل غير طبيعي.
٢. لم يتم ضبط أمر إنهاء القوس الكهربائي بعد بدء تشغيله.

السبب: عند ظهور هذا الإنذار على وحدة التعلُّم (teach pendant)، تحقق مما إذا كان أمر إنهاء القوس قد نُسي.
الحل: أضف أمر إنهاء القوس الكهربائي بعد أمر بدء تشغيله في البرنامج.
يعرض هذا المقال بالأساس المشكلات المتعلقة ببدء القوس الكهربائي، وإنهائه، وانقطاعه أثناء عملية اللحام التي تقوم بها روبوتات اللحام. ويمكن للمستخدمين الرجوع إلى الحلول المقترحة عند مواجهة مثل هذه المشكلات. وإذا تعذَّر حل المشكلة، يُرجى التواصل مع موظفي الدعم الفني لدى شركة جوجاو.
روبوت اللحام هو روبوت آلي يدمج وظائف لحام متعددة مثل اللحام المحمي بالغاز، ولحام القوس الأرجوني، والقطع البلازما، ولحام الليزر. ويتميز بمرونة عالية، وقدرة تكيف قوية، وكفاءة لحام مرتفعة، وجودة لحام مستقرة، ويمكن استخدامه على نطاق واسع في مجالات متنوعة مثل تصنيع الآلات، وصناعة السيارات، والإلكترونيات الدقيقة، وتعدين الفحم.

