















































Функція та принцип роботи осі гінучої машини
Станок для гінки CNC — це станок для гінки, який керується системою числового програмного керування (CNC). Станки для гінки CNC можуть гнути металеві плітки у різні профілі. Точність гінки та кількість залежать від синхронізаційної системи, гіdraulicної системи та задньої зупинки. Функціональність цих компонентів впливає від кількості осей станка для гінки CNC. Зрозуміння цих осей є важливим для вибору, налаштування та ефективної експлуатації станка для гінки.

1. Які осі є на станку для гінки?
Система ЧПУ керує рухом осей гинучого станка. Осі гинучого станка називаються відповідно до їхньої позиції у просторових координатах. Ось гинучого станка відноситься до механічного елемента, який керує рухом різних частин гинучого станка.
Ці рухи включають рух вгору і вниз, вперед і назад, ліворуч і праворуч, а також навіть точну настройку кута гинення металевої пластини. Точний рух осі забезпечує точне положення та кут металу у гинучому станку, сприяючи точним операціям гинення.
Необхідна точність деталі визначає кількість осей, необхідних для гинучого станка. Зазвичай, CNC-гинучий станок має принаймні три групи керованих осей: Y1/Y2, X і R осі. Ці осі використовуються для керування рухом задньої засобки, ползунка та інших компонентів.
Преси з крутильною віссю використовуються для гнучення простих деталей і мають принаймні дві вісі, які використовуються для керування віссю Y пластини та віссю X задньої засобки. Найпростіші преси-гнучачі потрібно тільки з віссю Y для керування верхнім та нижнім рухом пластини.
Точність та повторюваність руху віссю Y визначає точність кута гнучення. Система керування використовує вісі для керування рухом різних компонентів, таким чином керуючи кутом гнучення та розміром.
2. Що таке задня засобка пресу-гнучача?
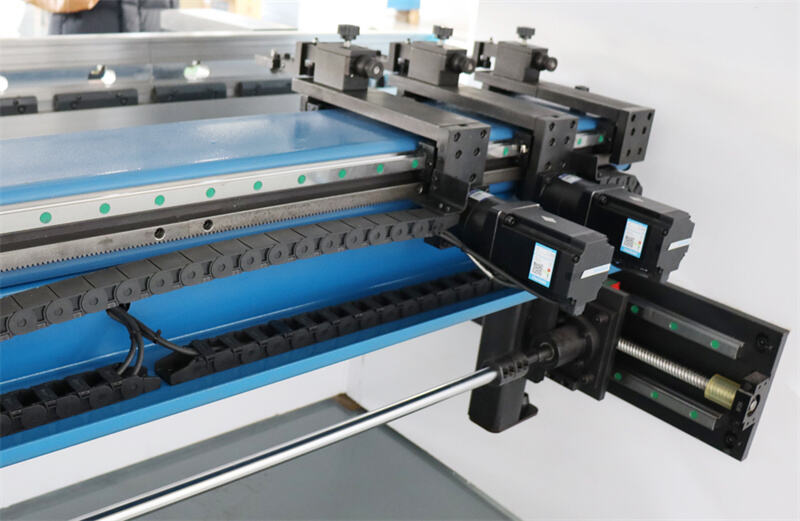
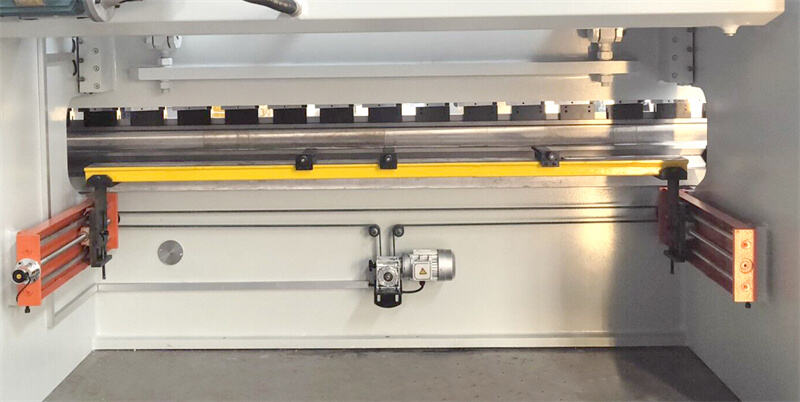
Задня засобка пресу-гнучача - це компонент, який допомагає встановити та вирівняти металеву пластину перед гнученням. Вона розташована у задній частині інструменту для гнучення і рухається вздовж вісі X.
Задня засобка складається з серії пальців та блоків, які можна настроїти до бажаної позиції залежно від бажаної довжини гнучення. Ці пальці можуть керуватися вручну, електрично або за допомогою системи CNC.
Задній стопор призначений для забезпечення відповідності та точного розташування металевої пластини під час гнучення. Він досягає точних кутів, довжин та геометрій гнучення шляхом контролю глибини та розташування між металевою пластинкою та інструментом для гнучення. Він відіграє ключову роль у збільшенні продуктивності, зменшенні часу налаштування обладнання та забезпеченні повторюваності операцій гнучення. Він виключає необхідність ручного вимірювання та оцінки, що дає змогу отримати послідовний та ефективний процес гнучення.
У сучасних системах гнучення задній стопор може бути інтегрований з контролером прес-тормозу для автоматичного позиціонування та контролю. Ця інтеграція забезпечує безперешкодне співробітництво між заднім стопором та осями прес-тормозу, що допомагає досягти точних операцій гнучення та точних та повторюваних гнучень.
Задній нормірник керується системою ЧПУ для точного позиціонування листового металу. Зазвичай, задній нормірник має принаймні одну вісь, а більш сучасні системи можуть мати до шести осей. Незалежні мотори приводять кожну вісь для руху вперед-назад у певному напрямку. Шарові шпали, т timing belts (хроногенераторні ремені) та осі працюють разом для досягнення синхронизованого руху. Ці точні, повторювані дії забезпечують точність у кожній партії деталей. Оптичні сенсори та програмування ЧПУ на гідравлічному пресі також можуть використовуватися для позиціонування.
Взаємозв'язок між заднім нормірником і віссю
Задній нормірник гідравлічного пресу тісно пов'язаний з віссю гідравлічного пресу та взаємно забезпечує точність та точність операції гнуття. Віссі гнуття посилаються на різні рухомі віссі всередині гідравлічного пресу, такі як X-вісь, Y-вісь, Z-вісь та R-вісь.
Ці осі керують позиціонуванням інструмента для гинання та рухом металевої пластини під час процесу гинання. З іншого боку, позицію та висоту заднього стопора можна контролювати, регулюючи осі преса-гібака. Керуючи позицією Y-осі та X-осі, задній стопор можна вирівняти з деталлю, забезпечуючи точність та узгодженість при гинанні.
На сьогоднішній день задній стопор та прес-гібак зазвичай інтегровані та керуються CNC системою. Ця інтеграція дозволяє автоматично позиціонувати та точно керувати осями преса-гібака та заднім стопором, що дозволяє здійснювати ефективний та точний процес гинання.
3. Головні групи керованих осей
Y-вісь Вертикальне рух плунжера
Y-вісь представляє собою вертикальну вісь преса-гібака, яка рухається у глибинному напрямку. Y-вісь керує вертикальним рухом слайду. Слайд рухається вгору та вниз, щоб загинати металеву деталь.
Під час гнучення в повітрі, верхнє рухання поперехи стає стабільним і рівномірним під дією осі Y. Ось Y можна поділити на осі Y1 і Y2, які розташовані на вершині двох колон.
Y1 і Y2 керують верхньо-нижньою взаємодією циліндрів з обох боків преса для гнучення. Під дією осі Y, верхнє рухання поперехи стає стабільним і рівномірним. Y1 і Y2 є повністю замкнутими керувальними осями лівого і правого циліндра відповідно. Y1 і Y2 також можуть незалежно регулювати рівень верхньої поперехи.
Y1: Повна замкнена керувальна вісь лівого циліндра
Y2: Повна замкнена керувальна вісь правого циліндра

4. Вимірювальна вісь у задній частині
Чим складніше деталь, тим більше осей потрібно для заднього стопора. Задній стопор може мати до 6 осей, які доступні в різних варіантах. Кожна вісь має незалежний приводний мотор, щоб забезпечити точність позиціонування.
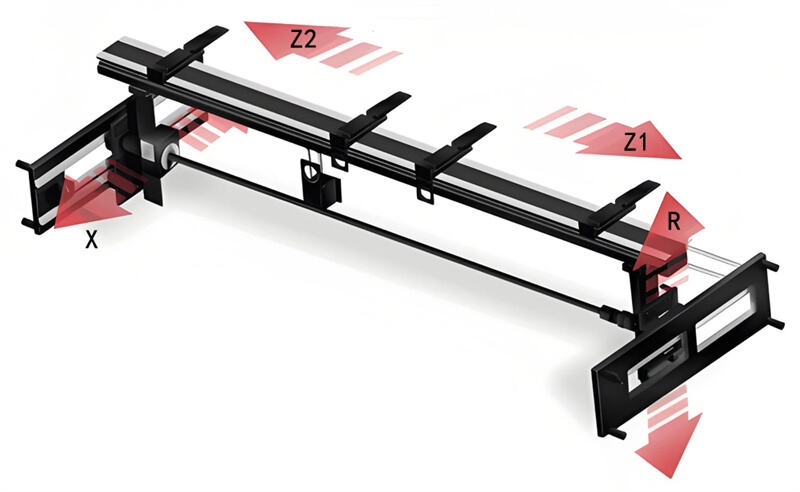
Ось X: Горизонтальне руху заднього стопора
Ось X керує горизонтальним рухом заднього стопора, точно позиціонуючи металеву деталь під слайдом. За допомогою горизонтального руху ось X забезпечує правильне вирівнювання кожного згину. Ось X є дуже важливою в процесі гинання, вона визначає довжину фланця деталі.
Пальці на осі X позиціонують металеву пластину, коли вона тискається на задній стопор. Ось X прес-брейку має фіксовану ширину руху, але її можна поділити на осі X1 і X2.
Віси X1 і X2 дозволяють пальцям заднього стопору рухатися незалежно вперед-назад на лівій та правій сторонах. Вісь X керує рухом заднього стопору вперед та назад. Ця вісь є ключовою для досягнення точного позиціонування та повторюваності.
Пальці точно позиціонують арку, як тільки вона потрапляє до заднього стопору. X1 - це вісь руху вперед-назад лівого стопорного пальця, а X2 - це вісь руху вперед-назад правого стопорного пальця. Вісі X1 і X2 можуть вимірювати довжину полки формованого деталевого заготовка.
X1: Вісь руху лівого стопорного пальця вперед-назад
X2: Вісь руху правого стопорного пальця вперед-назад

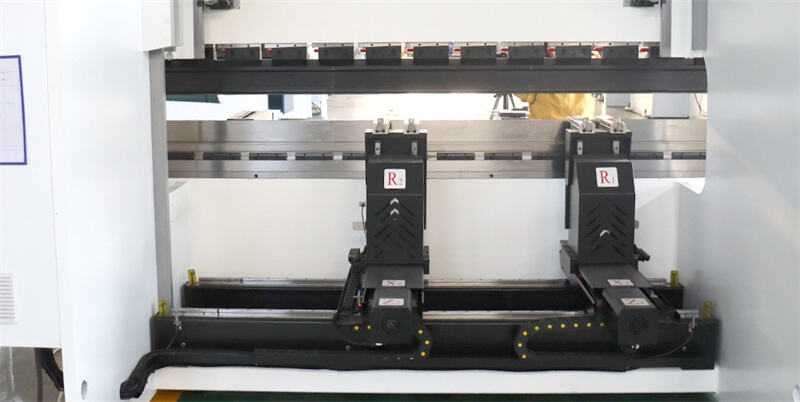
R-вісь вертикального руху заднього стопору
Вісь R керує вертикальним рухом задньої пласти, що є важливим для налагодження її висоти з метою урахування різних висот фланців та товщин матеріалу. Висота осі R автоматично регулюється в залежності від висоти форми.
Вісь R поділена на R1 і R2. Ці дві осі можуть незалежно переміщатися вгору та вниз з ліва та справа. Залежно від складності деталі, ці дві осі можуть бути розташовані на різні відстані. Вісь R також може встановлювати згинений фланець, який рухається під площею гинення.
R1: Ось вертикального руху лівого стопорного пальця
R2: Ось вертикального руху правого стопорного пальця

Z-вісь: Боковий рух задньої пласти
Вісь Z керує боковим рухом пальців заднього стопора, дозволяючи незалежне позиціонування пальців. Вісь Z корисна, коли гнучка обробка деталі вимагає декілька етапів і циклів гнучки, або коли потрібно обробити великі чи складні деталі. Вісі Z1 і Z2 можуть бути незалежно позиціоновані через програмування.
Використання позиціонування віссю Z може покращити точність та ефективність гнучки. Позиціонування віссю Z забезпечує рівномірну підтримку при гнучці довгих листів. Рух віссю Z визначає горизонтальну позицію заднього стопора для адаптації до ширини та горизонтальних вимог різних деталей.
Z1: Вісь руху лівого пальця стопора вліво та вправо
Z2: Вісь руху правого пальця стопора вліво та вправо

5. Інші вісі на прес-гнучці
Гідравлічні преси-гнучки відіграють ключову роль у сфері сучасного гнучання металу. Крім звичайних осей, що зазначені вище, сучасні преси-гнучки комплектуються багатьма додатковими осями для кращого контролю та гнучкості. Наприклад, V-вісь, L-вісь та Delta X-вісь.
V-вісь: Компенсація корони
Особливістю V-осі є введення поняття компенсації прогину. При гнученні довгих металевих деталей часто відбувається прогин у центрі через тиск, який виникає завдяки пресу-гнучку, що призводить до неідеального гнучення. Щоб вилучити це, V-вісь регулює ложе машини та компенсує прогин, забезпечуючи точне прямолінійне гнучення на всьому протязі матеріалу.
L-вісь керує горизонтальним рухом задньої зупинки. Цей рух з боку на бок додає гнучкості для обробки ширших металевих аркушів або гнучень за межами центру. Вона додає значної гнучкості під час операцій пресу-гнучка, особливо при роботі з складними приладами та точними операціями гнучення.
Вісь Delta X: Незалежне рухання пальців задньої зупинки
Вісь Delta X керує незалежним рухом пальців задньої зупинки, дозволяючи кожному пальцю рухатися незалежно, що надає велику перевагу при складних операціях гнучення або для несиметричних деталей. За допомогою незалежної настройки положення кожного пальця вісь Delta X забезпечує високоточне гнучення при складних та спеціалізованих операціях обробки.
Найголовніше, ці осі забезпечують більшу точність та точність при операціях на прес-гнучарці. Розуміння їх можливостей та як оптимізувати їх використання може значно покращити ефективність, точність та загальну продуктивність гнучення металу та обробки.
З розвитком технологій багато передових осей та функцій будуть представлені для того, щоб розширити межі того, що можливо у сфері обробки металу.
6. Конфігурація та вибір
Мінімальна конфігурація
Для базової роботи CNC-гідравлічний гіб мусить мати принаймні одну Y-вісь, яка керує вертикальним рухом слайду. Більш поширена та функціональна конфігурація - це трьохвісова система, яка включає:
Y-вісь (y1 і y2 осі): керує вертикальним рухом слайду. Незалежне керування Y1 і Y2 підвищує точність, особливо для асиметричних деталей.
X-вісь: керує горизонтальним рухом заднього стопора, забезпечуючи точне розташування деталі.
R-вісь: керує вертикальним рухом пальців заднього стопора для обслуговування різних висот краю та товщин матеріалу.
Наприклад, триосійна система може ефективно виконувати базові завдання згина, такі як формування рівномірних гострих кутів у металевих листах для створення простих дужок.

Напередівні конфігурації осей
Для більш складних завдань згина та вищої точності можна інтегрувати додаткові осі у CNC прес-гідку. Ці напередівні конфігурації включають:
Z-вісь (Z1 і Z2): керує бічним рухом пальців заднього гідка. Незалежні осі Z1 і Z2 дозволяють точне позиціонування кожного пальця, що є критичним для складних деталей.
Вісь Delta X: Дозволяє кожному пальцю рухатися незалежно по горизонталі вздовж осі X. Це особливо корисно при обробці несиметричних частинок та створенні складних згинів.
Компенсація корони (вісь V): Виправляє відхилення у ложі преса під час процесу гинання, забезпечуючи рівномірне розподілення тиску і стабільні кути гинання.
Наприклад, для виготовлення складних компонентів з багатьма гинами різних кутів і розмірів потрібна точність та гнучкість, які надають ці додаткові осі.
Вибір правильних осей
При визначенні кількості осей для вашого ЧПУ пресу-гинача врахуйте наступні фактори:
Складність деталі
Якщо ви регулярно обробляєте складні або незрівні частини, додаткові осі, такі як Z1/Z2 і Delta X, є необхідними. Ці осі забезпечують гнучкість та точність, необхідні для обробки складних згинів і різних кутів.
Вимоги до точності
Вимоги до більшої точності вимагають більш продвинених конфігурацій. Незалежне керування Y1 і Y2, поєднане з компенсацією корони, гарантує, що навіть найбільш вимогливі згиначі виконуються з точністю.
Обсяг виробництва
Для великообсяжного виробництва, CNC прес-гідний, укомплектований багатьма осями, може значно зменшити час налаштування та збільшити виробничий вихід. Автоматична регуляція заднього стопора та точна позиціонування мінімізують ручне втручання та покращують загальну ефективність.
Баланс вартості та можливостей
Хоча додаткові осі можуть покращити функціональність та точність CNC прес-гідного, вони також збільшують вартість машини. Важливо збалансувати бюджет з потребами операції:
Базова конфігурація: Підходить для простих завдань згина та обмежених бюджетів. Трьохосна система (Y1/Y2, X, R) забезпечує хороший баланс між функціональністю та вартістю.
Середня конфігурація: Підходить для завдань середньої складності та вимог до точності. Додавання осей Z1/Z2 до базової системи збільшує гнучкість без значної підвищення вартості.

Прогресивна конфігурація: Необхідна для високоточних та складних операцій згина. Включенню Delta X та компенсації корони (V-вісь) у систему забезпечує найкращий результат у своєму класі, але за більш високої вартості.

У загальному розгляді, кількість осей у прес-тормозі визначає складність та точність обробленого елемента. Проте, чим більше осей, тим вища вартість покупки машини. Якщо немає потреби у складному згині, базовий трьохосний або чотирьохосний прес-тормоз є всього лише потрібним. Якщо необхідно обробляти складні та точні деталі, чим більше осей, тим кращі результати згину.
Точність гинання преса-гідравліка залежить від руху його осей. Прес-гідравлік повинен мати принаймні одну Y-вісь для керування вертикальним рухом слайду. Y-вісь є найважливішою, оскільки вона керує кутом гинання деталі. Найбільш поширена конфігурація преса-гідравліка має три осі, укомплектовані Y1/Y2, X та R осями.
При покупці преса-гідравліка важливо вибирати потрібну кількість осей відповідно до складності деталі. JUGAO CNC MACHINE може допомогти вам вибрати найбільш відповідний прес-гідравлік відповідно до вашого бюджету.

