Ano-ano ang ilang karaniwang problema na kinakaharap kapag gumagamit ng mga robot sa pag-weld?
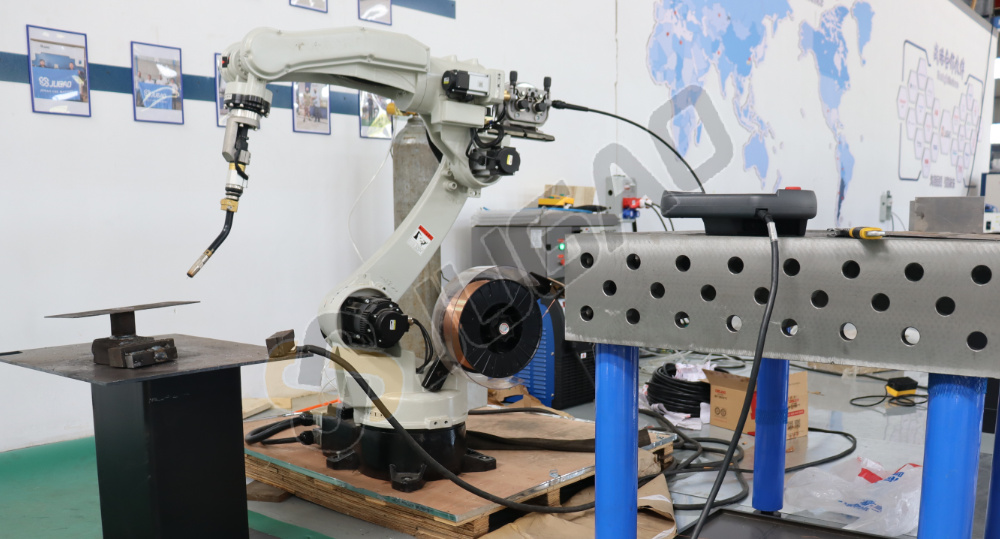
Ang paggamit ng mga robot sa pagsolda ay hindi lamang nakakapagpapabilis at mapapabuti ang kalidad ng pagsolda at mapapataas ang kahusayan sa produksyon, kundi nakakabawas din sa mga kinakailangang kasanayan ng mga soldador, na kung saan ay nagpapababa sa panahon ng paghahanda para sa mga upgrade ng produkto at nababawasan ang kaugnay na pamumuhunan sa kagamitan. Kapag gumagamit ng kagamitang pang-pagsolda na may robot, maaaring mangyari ang mga problema tulad ng pagsolda na nasa labas ng sentro at ng pagkakalantad ng metal (undercut) dahil sa maling operasyon o pinsala sa kagamitan. Kaya, paano dapat harapin ang mga problemang ito? Upang tulungan ang mga gumagamit na malutas ang mga problemang ito na kinakaharap nila sa paggamit ng mga robot sa pagsolda, tingnan natin nang mas malapit ang tiyak na nilalaman sa ibaba.
Ang hindi sentro na pag-weld ay maaaring dahil sa maling posisyon ng pag-weld o sa mga problema sa paghahanap ng welding torch. Sa kasong ito, isaalang-alang kung ang TCP (posisyon ng sentrong punto ng welding torch) ay tumpak at i-adjust ito nang naaayon. Kung ito ay madalas mangyari, suriin ang zero position ng bawat axis ng robot at i-recalibrate ito. Ang undercut ay maaaring dahil sa hindi angkop na pagpili ng mga parameter ng pag-weld, maling anggulo o posisyon ng welding torch, na maaaring i-adjust nang naaayon. Ang mahinang gas shielding, labis na makapal na primer sa workpiece, o hindi sapat na pagpapahangin ng shielding gas ay maaari ring sanhi ng mga isyung ito; ang tamang mga adjustment ay magreresolba ng problema. Ang labis na spatter ay maaaring dulot ng hindi angkop na mga parameter ng pag-weld ng welding robot, mga isyu sa komposisyon ng gas, o labis na mahabang extension ng welding wire.
Ang pag-aadjust ng kapangyarihan ng makina ay maaaring baguhin ang mga parameter ng pag-weld, ang pag-aadjust ng ratio ng gas gamit ang gas meter, at ang pag-aadjust ng relatibong posisyon ng welding torch at workpiece ay maaaring makatulong. Para sa isyu ng pagbuo ng arc crater sa dulo ng weld matapos ang paglamig, maaaring idagdag ang isang submerged arc crater function sa mga programmable na hakbang upang punuan ito. Ang mga collision ng gun ay maaaring dahil sa mga deviasiya sa pag-aassemble ng workpiece o sa hindi tumpak na TCP (Torch Control Point) ng welding torch. Ang pagsusuri sa instalasyon o ang pagbabago ng TCP ng welding torch ay maaaring makatulong. Ang mga depekto sa arc at ang kakayahang hindi pasimulan ang arc ay maaaring dahil sa welding wire na hindi nakakapag-contact sa workpiece o sa labis na mababang mga parameter ng proseso. Ang manu-manong pagpapasok ng wire, ang pag-aadjust ng distansya sa pagitan ng welding torch at ng weld, o ang pag-aadjust ng mga parameter ng proseso ay maaaring makatulong.
Ang isang alarm ay maaaring magpahiwatig ng isang problema sa sistema ng pagsubaybay sa panlaban na gas, tubig na pampalamig, o suplay ng panlaban na gas. Mahalaga ang pagsusuri sa mga linya ng tubig na pampalamig o panlaban na gas. Dapat piliin ng mga teknik sa pag-program ng robot na pang-welding ang isang makatuwirang pagkakasunud-sunod ng pag-welding upang mabawasan ang depekto sa pag-welding at matukoy ang haba ng landas ng paggalaw ng welding torch. Ang mga spatial transition ng welding torch ay nangangailangan ng maikli at makinis na landas ng paggalaw. Upang mapag-optimise ang mga parameter ng pag-welding, ginagawa ang mga test piece para sa mga eksperimentong pag-welding at pagpapatunay ng proseso. Ginagamit ang angkop na orientasyon ng positioner, posisyon ng welding torch, at lokasyon ng welding torch na kaugnay sa sambitan. Pagkatapos i-fix ang workpiece sa positioner, kung ang weld seam ay hindi nasa ideal na posisyon at anggulo, kailangang patuloy na i-adjust ang positioner habang nagpo-program upang matiyak na ang weld seam ay unti-unting mararating ang pahalang na posisyon ayon sa pagkakasunud-sunod ng pag-welding.
Kasabay nito, ang mga posisyon ng mga axis ng robot ay kailangang patuloy na i-adjust upang makapagpasya nang naaayon sa posisyon ng welding torch, ang anggulo nito, at ang haba ng extension ng wire na nauugnay sa hiwa. Pagkatapos matukoy ang posisyon ng workpiece, ang posisyon ng welding torch na nauugnay sa hiwa ay kailangang obserbahan nang biswal ng programmer—na isang napakahirap na gawain. Ang mga programa para sa panahon ng paglilinis ng torch ay mahalaga. Pagkatapos isulat ang isang programa sa pagsusulat ng welding na may tiyak na haba, dapat agad na ipasok ang isang programa para sa paglilinis ng torch upang maiwasan ang pagkakablock ng nozzle ng welding at ng contact tip dahil sa welding spatter, upang mapanatili ang kalinisan ng torch, mapabuti ang buhay ng nozzle, matiyak ang maaasahang pagsisimula ng arc, at bawasan ang welding spatter. Ang pagsusulat ng programa ay karaniwang hindi natatapos sa isang hakbang lamang; kailangan ito ng patuloy na pagsusuri at pag-aayos habang nagpapaandar ang robot sa pagsusulat ng welding, kasama ang pag-aadjust ng mga parameter ng welding at ng posisyon ng welding torch, atbp., upang makabuo ng isang mabuting programa. Ang mga tauhan na gumagamit ng mga robot sa pagsusulat ng welding ay dapat kumuha ng mga precaution upang maiwasan ang pinsala sa kagamitan, ang pagbaba ng kahusayan sa trabaho, at iba pang mga isyu. Kung mangyari man ang gayong mga problema, maaaring tumingin ang mga gumagamit sa mga kaugnay na gabay para sa pagpaplano at pagpapanatili upang matiyak na ang robot sa pagsusulat ng welding ay maaari pa ring gumana nang normal at tumugon sa pangangailangan ng higit pang mga gumagamit.