Quais são alguns problemas comuns encontrados ao utilizar robôs de soldagem?
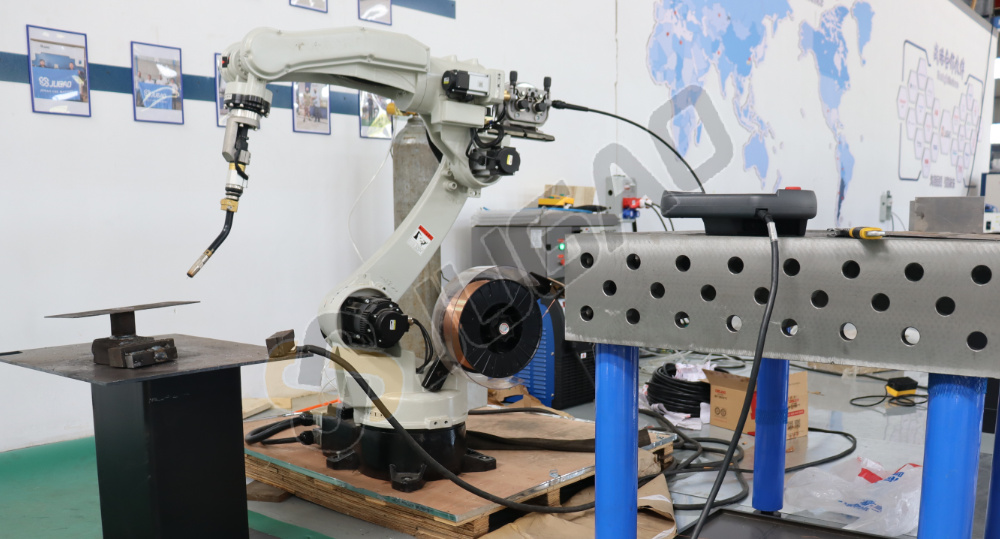
O uso de equipamentos de soldagem robótica não só estabiliza e melhora a qualidade da soldagem e aumenta a eficiência da produção, como também reduz os requisitos de habilidade dos soldadores, encurtando assim o ciclo de preparação para atualizações de produtos e diminuindo o investimento correspondente em equipamentos. Ao utilizar equipamentos de soldagem robótica, podem ocorrer problemas como soldagem descentralizada e rebaixamento (undercut) devido à operação inadequada ou a danos no equipamento. Como esses problemas devem ser resolvidos? Para ajudar os usuários a lidar com essas questões encontradas no uso de robôs de soldagem, analisemos mais detalhadamente o conteúdo específico a seguir.
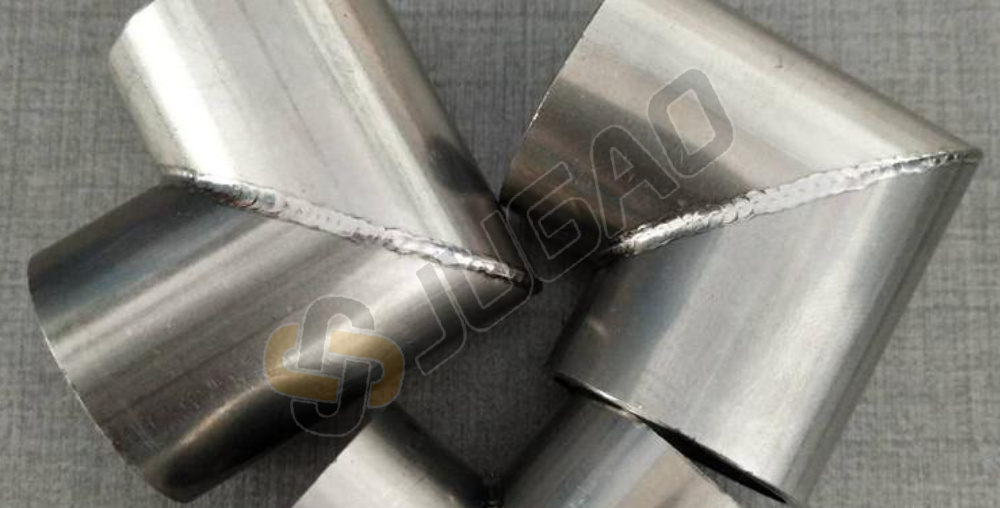
A soldagem fora do centro pode ser causada por uma posição incorreta de soldagem ou por problemas na busca da tocha de soldagem. Nesse caso, considere se o TCP (ponto central da posição da tocha de soldagem) está correto e ajuste-o conforme necessário. Se isso ocorrer com frequência, verifique a posição zero de cada eixo do robô e realize novamente a calibração. A mordedura pode ser causada pela seleção inadequada dos parâmetros de soldagem, pelo ângulo ou posição incorretos da tocha de soldagem, podendo ser ajustados adequadamente. Uma proteção gasosa insuficiente, uma camada de primer excessivamente espessa na peça de trabalho ou uma secagem inadequada do gás de proteção também podem ser causadas por esses problemas; ajustes apropriados resolverão a situação. A projeção excessiva de respingos pode ser causada por parâmetros de soldagem inadequados do robô de soldagem, por problemas na composição do gás ou por um alongamento excessivo do arame de soldagem.
Ajustar a potência da máquina pode modificar os parâmetros de soldagem, ajustar a proporção de gás utilizando o medidor de gás e ajustar a posição relativa da pistola de soldagem e da peça trabalhada também pode ajudar. Para o problema de formação de uma cratera de arco na extremidade da solda após o resfriamento, pode-se adicionar uma função de cratera de arco submersa nas etapas programáveis para preenchê-la. Colisões da pistola podem ocorrer devido a desvios na montagem da peça trabalhada ou à imprecisão do TCP (Ponto de Controle da Pistola) da pistola de soldagem. Verificar a instalação ou modificar o TCP da pistola de soldagem pode ajudar. Defeitos no arco e a incapacidade de acender o arco podem ser causados pela não-conexão do arame de soldagem com a peça trabalhada ou por parâmetros de processo excessivamente baixos. Alimentação manual do arame, ajuste da distância entre a pistola de soldagem e a solda ou ajuste dos parâmetros de processo podem ajudar.
Um alarme pode indicar um problema no sistema de monitoramento do gás de proteção, na água de refrigeração ou no fornecimento de gás de proteção. Verificar as tubulações de água de refrigeração ou de gás de proteção é fundamental. As técnicas de programação de robôs de soldagem devem selecionar uma sequência de soldagem adequada para minimizar a deformação da soldagem e determinar o comprimento da trajetória da tocha de soldagem. As transições espaciais da tocha de soldagem exigem uma trajetória de movimento curta e suave. Para otimizar os parâmetros de soldagem, são fabricadas peças-teste para experimentos de soldagem e verificação do processo. Adota-se uma orientação apropriada do posicionador, uma postura adequada da tocha de soldagem e uma posição correta da tocha de soldagem em relação à junta. Após a fixação da peça de trabalho no posicionador, caso a cordão de solda não esteja na posição e ângulo ideais, o posicionador precisa ser ajustado continuamente durante a programação, garantindo que o cordão de solda atinja progressivamente uma posição horizontal, conforme a sequência de soldagem.
Simultaneamente, as posições dos eixos do robô devem ser ajustadas continuamente para determinar de forma adequada a posição, o ângulo e o comprimento de extensão do arame da tocha de soldagem em relação à junta. Após a posição da peça ser determinada, a posição da tocha de soldagem em relação à junta deve ser observada visualmente pelo programador, o que é bastante difícil. Programas de limpeza oportuna da tocha são essenciais. Após a elaboração de um programa de soldagem com determinado comprimento, um programa de limpeza da tocha deve ser inserido imediatamente para evitar que salpicos de soldagem obstruam o bico de soldagem e a ponta de contato, garantindo assim a limpeza da tocha, prolongando a vida útil do bico, assegurando uma ignição confiável do arco e reduzindo os salpicos de soldagem. A programação, em geral, não pode ser concluída em uma única etapa; ela exige verificação e modificação contínuas durante a soldagem com o robô, ajustando parâmetros de soldagem e a postura da tocha de soldagem, entre outros fatores, para criar um bom programa. Os profissionais que operam robôs de soldagem devem tomar precauções para evitar danos aos equipamentos, redução da eficiência operacional e outros problemas. Caso tais problemas ocorram, os usuários podem consultar as orientações pertinentes sobre agendamento e manutenção, assegurando que o robô de soldagem continue operando normalmente e atenda às necessidades de um número maior de usuários.