Jakie są najczęstsze problemy występujące podczas użytkowania robotów spawalniczych?
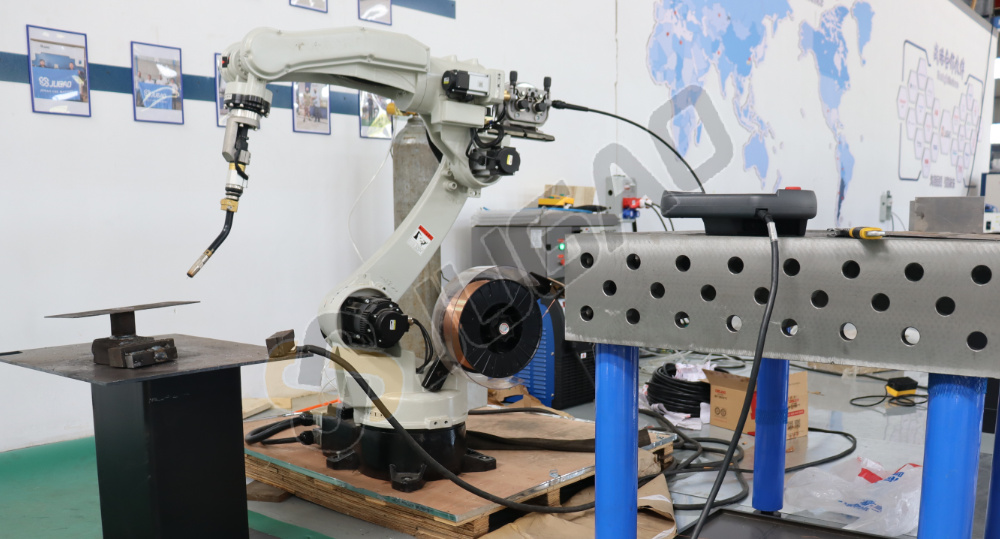
Zastosowanie robotów spawalniczych pozwala nie tylko na ustabilizowanie i poprawę jakości spawania oraz zwiększenie wydajności produkcji, ale także na obniżenie wymagań kwalifikacyjnych stawianych spawaczom, co skraca cykl przygotowania do modernizacji produktów i zmniejsza odpowiadające inwestycje w wyposażenie. Przy użyciu urządzeń do spawania robotycznego mogą wystąpić problemy takie jak spawanie z przesunięciem osi lub podcięcia spoiny, wynikające z niewłaściwej obsługi lub uszkodzenia sprzętu. Jak więc radzić sobie z tymi problemami? Aby pomóc użytkownikom w rozwiązywaniu trudności napotykanych podczas eksploatacji robotów spawalniczych, przyjrzymy się bliżej poniższej treści.
Spawanie poza środkiem może wynikać z nieprawidłowej pozycji spawania lub problemów z wykrywaniem przez palnik spawalniczy. W takim przypadku należy sprawdzić, czy TCP (położenie punktu środkowego palnika spawalniczego) jest prawidłowe, i odpowiednio je skorygować. Jeśli zjawisko to występuje często, należy sprawdzić pozycję zerową każdej osi robota i przeprowadzić jego ponowną kalibrację. Podcięcia mogą być spowodowane nieodpowiednim doborem parametrów spawania, nieprawidłowym kątem lub położeniem palnika spawalniczego – można je odpowiednio skorygować. Słabe osłona gazowa, zbyt gruba warstwa podkładu na elemencie roboczym lub niedostateczne osuszanie gazu osłonowego mogą również być spowodowane tymi problemami; odpowiednie dostosowania rozwiążą ten problem. Nadmierna ilość iskier może wynikać z nieodpowiednich parametrów spawania robota spawalniczego, problemów z składem gazu osłonowego lub zbyt długiego wystania drutu spawalniczego.
Dostosowanie mocy maszyny pozwala zmodyfikować parametry spawania, regulacja stosunku gazów za pomocą miernika gazu oraz dostosowanie wzajemnego położenia palnika spawalniczego i przedmiotu roboczego mogą pomóc. W przypadku powstawania krateru łukowego na końcu szwu po ochłodzeniu można dodać funkcję zanurzonego krateru łukowego do programowalnych kroków, aby go wypełnić. Kolizje palnika mogą wynikać z odchyłek w montażu przedmiotu roboczego lub niedokładnej kalibracji TCP palnika (punktu sterowania palnikiem). Sprawdzenie montażu lub skorygowanie TCP palnika spawalniczego może pomóc. Wady łuku oraz brak możliwości zapłonu łuku mogą być spowodowane brakiem kontaktu drutu spawalniczego z przedmiotem roboczym lub zbyt niskimi parametrami procesu. Ręczne podawanie drutu, dostosowanie odległości między palnikiem spawalniczym a szwem lub korekta parametrów procesu mogą pomóc.
Alarm może wskazywać na problem z systemem monitorowania gazu osłonowego, wody chłodzącej lub dostawą gazu osłonowego. Sprawdzenie przewodów wody chłodzącej lub gazu osłonowego jest kluczowe. Techniki programowania robota spawalniczego powinny obejmować wybór rozsądnego ciągu spawania w celu minimalizacji odkształceń spawalniczych oraz określenie długości trasy ruchu palnika spawalniczego. Przestrzenne przejścia palnika spawalniczego wymagają krótkiej i płynnej ścieżki ruchu. W celu zoptymalizowania parametrów spawania wykonywane są próbki do eksperymentów spawalniczych i weryfikacji procesu. Zastosowano odpowiednią orientację pozycjonerów, położenie palnika spawalniczego oraz jego położenie względem spoiny. Po zamocowaniu przedmiotu roboczego na pozycjonerze, jeśli spoina nie znajduje się w idealnym położeniu i pod kątem, pozycjoner należy ciągle dostosowywać w trakcie programowania, aby zapewnić stopniowe osiągnięcie przez spoinę położenia poziomego zgodnie z kolejnością spawania.
Jednocześnie pozycje osi robota muszą być ciągle korygowane, aby uzasadnionie określić położenie palnika spawalniczego, jego kąt nachylenia oraz długość wystającej części drutu spawalniczego względem spoiny. Po ustaleniu położenia przedmiotu obrabianego programista musi wizualnie sprawdzić położenie palnika spawalniczego względem spoiny – zadanie to jest dość trudne. Niezbędne są również programy czyszczące palnik w odpowiednim czasie. Po napisaniu programu spawania o określonej długości należy niezwłocznie wprowadzić program czyszczący palnik, aby zapobiec zatykaniu się dyszy spawalniczej i końcówki kontaktowej iskrami spawalniczymi; zapewnia to czystość palnika, wydłuża żywotność dyszy, gwarantuje niezawodne zapłonienie łuku elektrycznego oraz redukuje powstawanie iskier spawalniczych. Programowanie zazwyczaj nie może zostać zakończone w jednym etapie – wymaga ono ciągłej kontroli i modyfikacji podczas pracy robota spawalniczego, dostosowania parametrów spawania oraz położenia palnika spawalniczego itp., co pozwala stworzyć wysokiej jakości program. Osoby korzystające z robotów spawalniczych powinny podejmować odpowiednie środki ostrożności, aby uniknąć uszkodzenia sprzętu, obniżenia wydajności pracy oraz innych problemów. W przypadku wystąpienia takich problemów użytkownicy mogą odnieść się do odpowiednich wytycznych dotyczących harmonogramu konserwacji i obsługi technicznej, aby zapewnić dalszą bezawaryjną pracę robota spawalniczego oraz spełnienie potrzeb jak największej liczby użytkowników.