Kokie yra dažniausiai susiduriami sunkumai naudojant suvirinimo robotus?
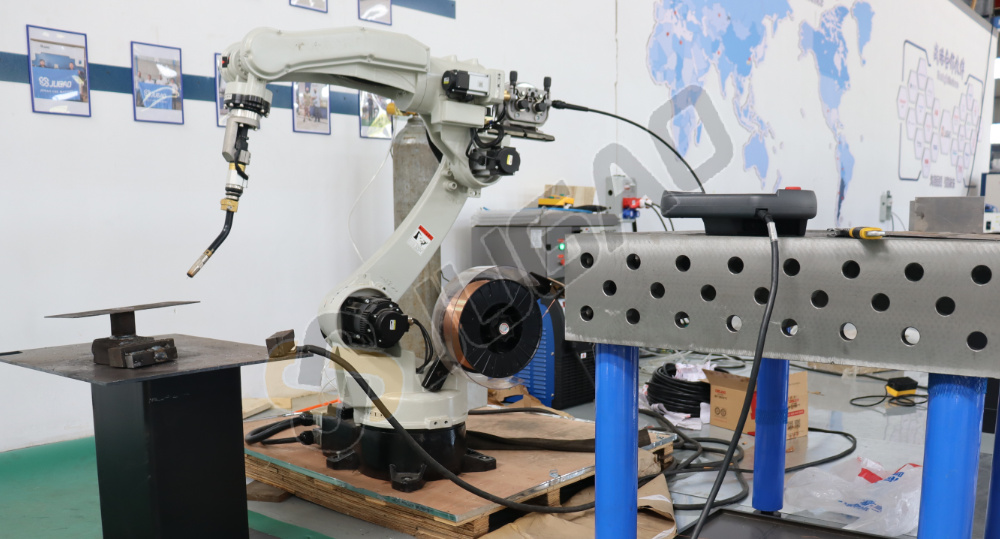
Virškinimo robotų naudojimas ne tik stabilizuoja ir pagerina suvirinimo kokybę bei padidina gamybos našumą, bet taip pat sumažina reikalavimus suvirintojams, todėl sutrumpinamas produktų atnaujinimų paruošimo ciklas ir mažinami atitinkami įrangos investicijų sąnaudos. Naudojant robotizuotą suvirinimo įrangą, dėl netinkamos eksploatacijos ar įrangos pažeidimo gali kilti problemų, tokių kaip centravimo nuokrypis ir įgriovimai. Taigi, kaip šias problemas reikėtų išspręsti? Kad padėtume vartotojams spręsti šias problemas, susiduriant su virškinimo robotais, panagrinėkime žemiau pateiktą konkrečią informaciją.
Nepercentrinis suvirinimas gali būti susijęs su neteisinga suvirinimo pozicija arba suvirinimo žnyplių paieškos problemomis. Šiuo atveju įvertinkite, ar TCP (suvarinimo žnyplių centro taško padėtis) yra tiksliai nustatyta, ir, jei reikia, ją sureguliuokite. Jei tai vyksta dažnai, patikrinkite kiekvienos robotų ašies nulinę padėtį ir atlikite pakartotinę kalibravimą. Įgilinimas (undercut) gali būti sukeltas netinkamais suvirinimo parametrais, neteisingu suvirinimo žnyplių kampu ar padėtimi – šiuos parametrus galima atitinkamai sureguliuoti. Blogas dujinis apsauginis sluoksnis, per storas grunto sluoksnis ant detalės arba nepakankamai išdžiovintas apsauginis dujų mišinys taip pat gali būti šių problemų priežastis; tinkamos korekcijos pašalins šią problemą. Per didelis iššaukimas (spatter) gali būti sukeltas netinkamais suvirinimo roboto parametrais, dujų sudėties problemomis arba per ilgu suvirinimo vielos išsikišimu.
Mašinos galios reguliavimas leidžia keisti suvirinimo parametrus, dujų santykio reguliavimas naudojant dujų skaitiklį ir suvirinimo liepsnos žnyplės bei detalės tarpusavio padėties reguliavimas taip pat gali padėti. Jei po suvirinimo atvėsus susidaro lankinio suvirinimo krateris siūlės pabaigoje, programuojamose žingsnių sekoje galima pridėti panardinamąjį kraterio užpildymo veiksmą. Liepsnos žnyplės smūgiai gali būti susiję su detalės surinkimo nuokrypiais arba netiksliu suvirinimo liepsnos žnyplės TCP (liepsnos žnyplės valdymo tašku). Patikrinus įrengimą arba pakeitus suvirinimo liepsnos žnyplės TCP galima išspręsti šią problemą. Lankinio suvirinimo defektai ir negalėjimas užkurti lanko gali būti susiję su tuo, kad suvirinimo vielos galas nepriliečia detalės arba su per mažais technologiniais parametrais. Rankinis vielos padavimas, atstumo tarp suvirinimo liepsnos žnyplės ir suvirinimo siūlės reguliavimas arba technologinių parametrų koregavimas gali padėti.
Signalizacija gali rodyti problemą su apsauginės dujų stebėjimo sistema, aušinamuoju vandeniu arba apsauginių dujų tiekimu. Būtina patikrinti aušinamojo vandens arba apsauginių dujų tiekimo vamzdžius. Virinant robotų programavimo technikos turi pasirinkti tinkamą virinimo seką, kad būtų sumažinta virinimo deformacija, taip pat nustatyti virinimo žnyplių judėjimo kelią. Virinimo žnyplių erdviniai perėjimai reikalauja trumpo ir sklandaus judėjimo kelio. Norint optimizuoti virinimo parametrus, gamina bandymo detalės virinimo eksperimentams ir technologinio proceso patvirtinimui. Taikoma tinkama pozicionuoklio orientacija, virinimo žnyplių padėtis ir virinimo žnyplių vieta santykinai prie siūlės. Kai detalė pritvirtinama prie pozicionuoklio, jei siūlė nėra idealioje padėtyje ir kampu, pozicionuoklis programuojant turi būti nuolat reguliuojamas, kad siūlė palaipsniui pasiektų horizontalią padėtį pagal virinimo seką.
Vienalaikyviškai robotų ašių padėtys turi būti nuolat koreguojamos, kad tinkamai nustatyti suvirinimo degiklio padėtį, kampą ir laidinio strypo išsikišimo ilgį santykyje su siūle. Po to, kai nustatoma darbo detalės padėtis, programuotojas vizualiai turi stebėti suvirinimo degiklio padėtį santykyje su siūle – tai yra ganėtinai sudėtinga užduotis. Laiku vykdomos degiklio valymo programos yra būtinos. Parašius tam tikro ilgio suvirinimo programą, nedelsiant reikia įvesti degiklio valymo programą, kad būtų užkirstas kelias šlako patekimui į suvirinimo žarnelę ir kontaktinį galiuką, užtikrinant degiklio švarumą, padidinant žarnelės tarnavimo laiką, užtikrinant patikimą lankinio išlydžio užsidegimą bei mažinant suvirinimo šlaką. Programavimas paprastai negali būti baigtas vienu etapu; jis reikalauja nuolatinio tikrinimo ir koregavimo robotinio suvirinimo metu, taip pat reikia koreguoti suvirinimo parametrus ir degiklio padėtį, kad būtų sukurtas kokybiškas programos variantas. Asmenys, dirbantys su suvirinimo robotais, turi imtis atsargumo priemonių, kad būtų išvengta įrangos pažeidimų, darbo našumo sumažėjimo ir kitų problemų. Jei tokios problemos vis dėlto kyla, vartotojai gali remtis atitinkamomis instrukcijomis dėl planavimo ir techninės priežiūros, kad užtikrintų suvirinimo robotų tolesnį normalų veikimą ir tenkintų platesnių vartotojų poreikius.