















































Kaip pasirinkti suvirinimo robotui pozicionierių
Padėčių keitikliai paprastai klasifikuojami pagal varomųjų variklių skaičių: vienašiai padėčių keitikliai, dvišiai padėčių keitikliai, trišiai padėčių keitikliai ir sudėtiniai padėčių keitikliai. Prieš suvirinimo operacijas ir jų metu padėčių keitiklis naudoja tvirtinimo įtaisus, kad pritvirtintų ir nustatytų suvirinamąjį detalę. Skirtingi reikalavimai suvirinamajai detalei lemia padėčių keitiklio apkrovos talpą ir judėjimo būdą. Kaip svarbus robotizuotų suvirinimo gamybos linijų ir lankstaus suvirinimo apdorojimo vienetų komponentas, padėčių keitiklio funkcija yra suvirinamosios detalės sukimas (perstumimas) į optimalią suvirinimo padėtį.

1. Vienašis padėčių keitiklis
Vieno ašies pozicionieriai paprastai klasifikuojami į L tipo ir C tipo pagal jų konstrukcinę formą. L tipo pozicionierius apima: aktyvią galvutę, užpakalinį stovą ir mechaninę rėmą. Aktyvi galvutė paprastai varoma suvirinimo robotų išorine ašimi, leidžiant koordinuotus judesius su suvirinimo robotu. Užpakalinis stovas neturi variklio ir naudoja sekimo sistemą. L tipo pozicionieriai daugiausia naudojami sukamų detalių suvirinimui.
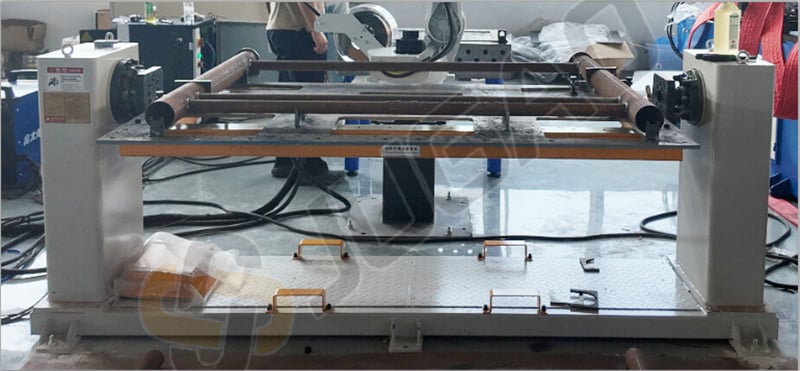
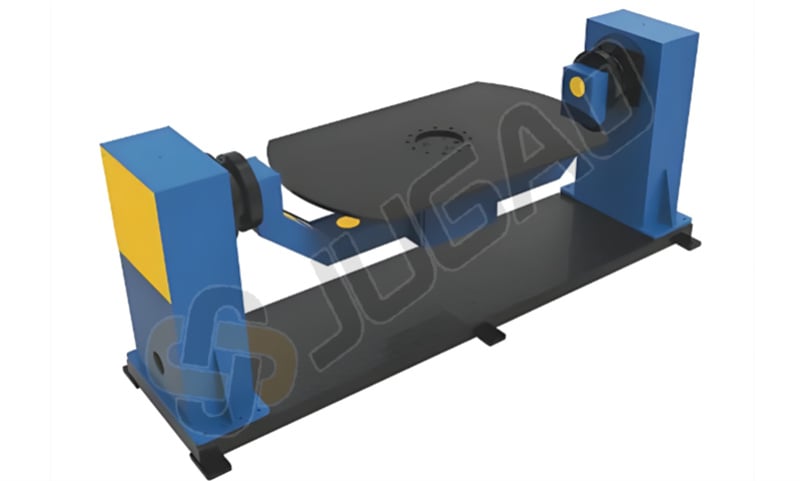
2. Dviejų ašių pozicionierius
Dviejų ašių pozicionieriai, daugiausia A tipo, sudaryti iš sukimosi ašies, pasvirimo ašies ir mechaninės rėmos. Jie paprastai varomi suvirinimo robotų išorinėmis ašimis, kad būtų pasiekiamas koordinuotas judėjimas. Teoriškai bet kuri siūlė gali būti nustatyta horizontalioje padėtyje arba laivuko formos suvirinimo padėtyje. A tipo pozicionieriai dažniausiai naudojami daugiaplokščių detalių (siūlės išdėstytos keliuose paviršiuose) suvirinimui.
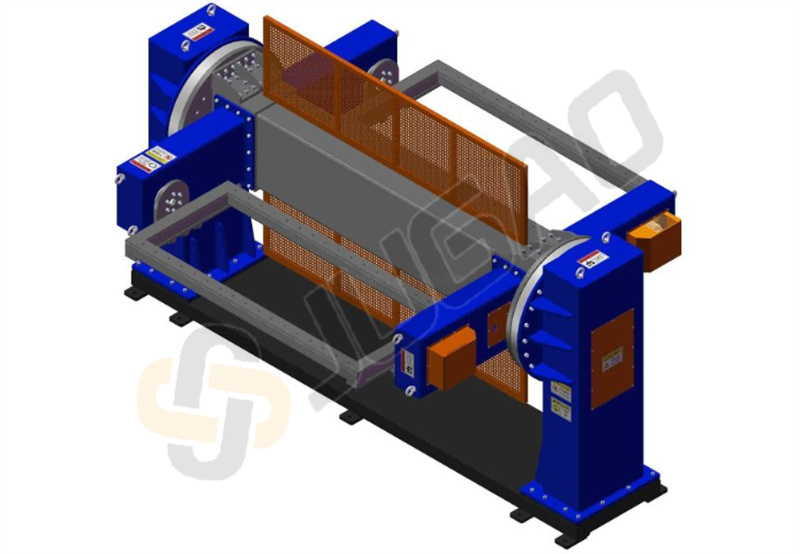
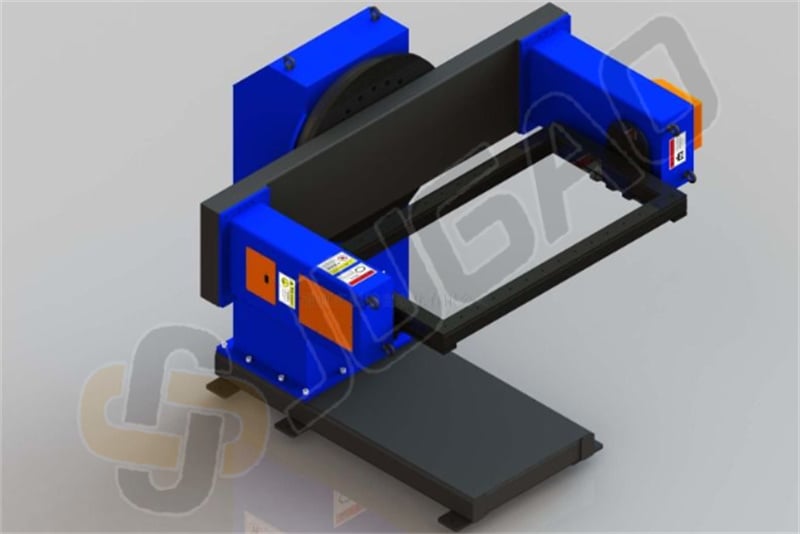
3. Trijų ašių pozicionierius
Tryjų ašių pozicionuotojai paprastai klasifikuojami į K tipo ir R tipo pagal jų sukamųjų ašių formą.
K tipo pozicionuotojai turi vertikalią pagrindinę sukamąją ašį ir du papildomus sukamuosius galvutės (lygiavertis L tipo pozicionuotojui). Jie paprastai valdomi išorinėmis suvirinimo robotų ašimis, leisdami koordinuotą judėjimą kartu su robotu. K tipo pozicionuotojai daugiausia naudojami sukamųjų detalių suvirinimui. Pagrindinė K tipo pozicionuotojų savybė yra ta, kad pozicijavimo judėjimas užima daugiausia vertikalaus erdvės, taip taupant horizontalią erdvę.
R tipo pozicionuotojai turi horizontalią pagrindinę sukamąją ašį ir du papildomus sukamuosius galvutes (lygiavertis L tipo pozicionuotojui). Jie paprastai valdomi išorinėmis suvirinimo robotų ašimis, leisdami koordinuotą judėjimą kartu su robotu. R tipo pozicionuotojai daugiausia naudojami sukamųjų detalių suvirinimui. R tipo pozicionuotojų charakteristika yra ta, kad jų judėjimas užima daugiausia horizontalios erdvės, taip taupant vertikalią erdvę.
4. Kompozitiniai pozicionuotojai
Kompozitiniai pozicionuotojai yra įvairių aukščiau minėtų pozicionuotojų tipų kombinacijos. Šioje vietoje pateikiame pagrindinę informaciją apie B tipo ir D tipo pozicionuotojus.
B tipo pozicionuotojas susideda iš dviejų A tipo pozicionuotojų ir vieno C tipo pozicionuotojo. Kiekvienas A tipo pozicionuotojas aptarnauja vieną stotį, o C tipo pozicionuotojas naudojamas stoties perjungimui. D tipo pozicionuotojas susideda iš dviejų dviejų ašių pozicionuotojų ir vieno C tipo pozicionuotojo. Kiekvienas dviejų ašių pozicionuotojas aptarnauja vieną stotį, o C tipo pozicionuotojas naudojamas stoties perjungimui.
Pagrindinis šviesos robotui skirtos pozicionuoklės parinkimo klausimas yra pasirinkti „išorinę ašį“, kuri galėtų „beveik be pertraukų“ veikti kartu su robotu. Praktikoje taip pat būtina pritaikyti ir optimizuoti įrangos našumo parametrus pagal konkrečius suvirinimo uždavinius, kad būtų pasiekti geresni suvirinimo rezultatai. Trumpai tariant, tik visiškai suprantant ir racionaliai naudojant suvirinimo pozicionuoklės našumo parametrus galima visiškai realizuoti įrangos privalumus, pagerinant suvirinimo gamybos efektyvumą ir kokybę.

