Რომელი არის საერთო პრობლემები, რომლებიც ხშირად წარმოიშობა საკვები რობოტების გამოყენების დროს?
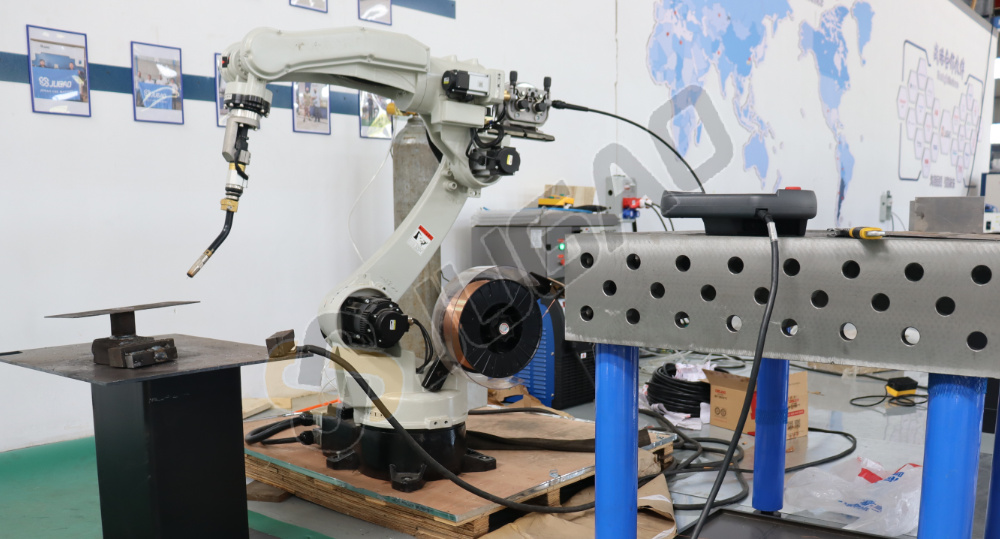
Საკარგაო რობოტების გამოყენება არ არის მხოლოდ საკარგაო ხარისხის სტაბილურობისა და გაუმჯობესების, ასევე წარმოების ეფექტურობის ამაღლების საშუალება, არამედ ამცირებს საკარგაო მუშაკების კვალიფიკაციის მოთხოვნებს, რითაც შემცირდება პროდუქტების ახალი ვერსიების მომზადების ვადა და შესაბამისი აღჭურვილობის ინვესტიციები. რობოტიზებული საკარგაო აღჭურვილობის გამოყენების დროს არასწორი ექსპლუატაციის ან აღჭურვილობის დაზიანების გამო შეიძლება წარმოიქმნას პრობლემები, როგორიცაა ცენტრიდან გადახრილი საკარგაო და ქვედა ჩაჭრილობა. ამ პრობლემების როგორ გადაჭრა? რომ მომხმარებლებს დაეხმაროს საკარგაო რობოტების გამოყენების დროს წარმოიქმნელი ამ პრობლემების გადაჭრაში, მოდით უფრო დაწვრილებით განვიხილოთ ქვემოთ მოცემული კონკრეტული ინფორმაცია.
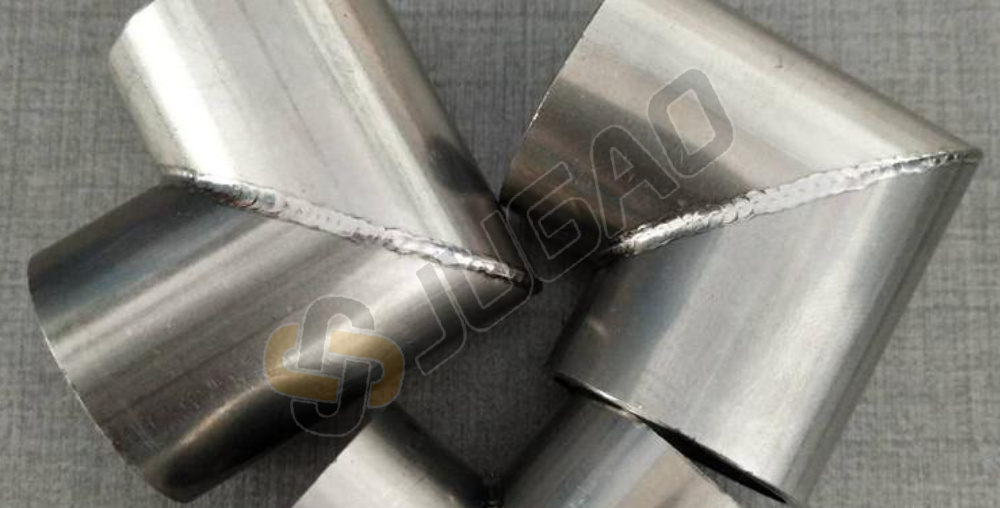
Გარედან შესრულებული სველდინგი შეიძლება გამოწვეული იყოს არასწორი სველდინგის პოზიციით ან სველდინგის ტორჩის ძიების პრობლემებით. ამ შემთხვევაში გაითვალისწინეთ, სწორია თუ არა TCP (სველდინგის ტორჩის ცენტრალური წერტილის პოზიცია), და შეასწორეთ შესაბამებლად. თუ ეს ხდება ხშირად, შეამოწმეთ რობოტის თითოეული ღერძის ნულოვანი პოზიცია და განახდენ კალიბრაციას. ქვემოთ გაჭრილობა შეიძლება გამოწვეული იყოს სველდინგის პარამეტრების არასწორი არჩევით, სველდინგის ტორჩის კუთხის ან პოზიციის არასწორი დაყენებით, რასაც შესაბამებლად შეიძლება შეასწოროთ. ამ პრობლემებს შეიძლება გამოიწვიოს არაკმარისი გაზის დაფარვა, სამუშაო ნაკრებზე ძალიან სქელი პრაიმერის დალაგება ან დაფარვის გაზის არასაკმარისი გამოშრობა; შესაბამებლად შესრულებული შესწორებები ამოხსნის ამ პრობლემას. ჭარბი შეხვედრის ნაკელი შეიძლება გამოწვეული იყოს სველდინგის რობოტის არასწორი სველდინგის პარამეტრებით, გაზის შემადგენლობის პრობლემებით ან სველდინგის სადგენი სადგენის ძალიან გრძელი გაგრძელებით.
Მანქანის სიმძლავრის რეგულირებით შეიძლება შეცვალოს საკოვკანო პარამეტრები, აირის შეფარდების რეგულირება აირის მერხის გამოყენებით და საკოვკანო ნახსენისა და დამუშავების ნაკრების შედარებითი პოზიციის რეგულირება დახმარებას გამოაჩენს. საკოვკანო შეერთების ბოლოს გაცივების შემდეგ არკის კრატერის წარმოქმნის პრობლემის შემთხვევაში, კრატერის დასავსებლად შეიძლება დაემატოს დამალული არკის კრატერის ფუნქცია პროგრამირებად ნაბიჯებში. ნახსენის შეჯახება შეიძლება გამოწვეული იყოს დამუშავების ნაკრების შეკრების გადახრებით ან საკოვკანო ნახსენის TCP-ის (Torch Control Point) არასწორი დაყენებით. დაყენების შემოწმება ან საკოვკანო ნახსენის TCP-ის შესაბამისი შეცვლა დახმარებას გამოაჩენს. არკის დეფექტები და არკის არ აღძრა შეიძლება გამოწვეული იყოს საკოვკანო სადენის დამუშავების ნაკრებთან კონტაქტის არ არსებობით ან პროცესის პარამეტრების ჭარბად დაბალი მნიშვნელობით. სადენის ხელით მიწოდება, საკოვკანო ნახსენისა და საკოვკანო შეერთების შორის მანძილის რეგულირება ან პროცესის პარამეტრების შეცვლა დახმარებას გამოაჩენს.
Შეიძლება გამოიწვიოს სიგნალი დაფარვის აირის მონიტორინგის სისტემაში, გაგრილების წყალში ან დაფარვის აირის მიწოდებაში არსებული პრობლემის გამო. გაგრილების წყლის ან დაფარვის აირის ხაზების შემოწმება საკრიტიკო მნიშვნელობის მოაქვს. სასრული რობოტის პროგრამირების ტექნიკების დროს უნდა აირჩევა მისაღები სარეცხი თანმიმდევრობა სარეცხი დეფორმაციის მინიმიზაციის მიზნით და უნდა განისაზღვროს სარეცხი ნახსენის მოძრაობის ტრაექტორიის სიგრძე. სარეცხი ნახსენის სივრციული გადასვლების დროს მოძრაობის ტრაექტორია უნდა იყოს მოკლე და გლუვი. სარეცხი პარამეტრების ოპტიმიზაციის მიზნით წარმოება სასარეცხი ექსპერიმენტებისა და პროცესის ვერიფიკაციის სატესტო ნიმუშები. მიღებულია შესაბამისი პოზიციონერის მიმართულება, სარეცხი ნახსენის პოზიცია და სარეცხი ნახსენის მდებარეობა შეერთების მიმართ. როდესაც ნაკეთობა დაფიქსირებულია პოზიციონერზე, თუ სარეცხი ხაზი არ მოექცევა იდეალურ პოზიციასა და კუთხეში, პროგრამირების დროს პოზიციონერის მუდმივი რეგულირება სჭირდება, რათა სარეცხი ხაზი სარეცხი თანმიმდევრობის მიხედვით თანდათან ჰორიზონტალურ მდებარეობას მიაღწიოს.
Ერთდროულად, რობოტის ღერძების პოზიციები უნდა მუდმივად გამოიყოფოს, რათა შესაძლებელი იყოს საკმარისად სწორად განსაზღვრული იყოს საკვების მიმართულება, კუთხე და საკვების გაგრძელების სიგრძე შეერთების მიმართ. შემდეგ, როგორც კი დამუშავების ნაკვეთის პოზიცია განსაზღვრება, პროგრამისტმა ვიზუალურად უნდა შეამოწმოს საკვების პოზიცია შეერთების მიმართ, რაც საკმაოდ რთული ამოცანაა. საკვების დროული სუფთავის პროგრამები საჭიროების შესაბამედ აუცილებელია. როგორც კი გარკვეული სიგრძის საკვების პროგრამა ჩაიწერება, უნდა მივიღოთ საკვების სუფთავის პროგრამა, რათა თავიდან ავიცილოთ საკვების ნოზლისა და კონტაქტის წერტილის დაბლოკვა საკვების შეფარებით, რაც უზრუნველყოფს საკვების სუფთა მდგომარეობას, გაზრდის ნოზლის სიცოცხლის ხანგრძლივობას, უზრუნველყოფს საიმედო არკის გაჩენას და ამცირებს საკვების შეფარებას. პროგრამირება საერთოდ არ შეიძლება ერთ ეტაპზე დასრულდეს; იგი მოითხოვს მუდმივ შემოწმებასა და შესწორებას რობოტული საკვების დროს, საკვების პარამეტრების და საკვების პოზიციის რეგულირებას და ა.შ., რათა შეიქმნას კარგი პროგრამა. საკვების რობოტების გამოყენების პერსონალმა უნდა მიიღოს სათანადო საშუალებები მოწყობილობის დაზიანების, სამუშაო ეფექტურობის შემცირების და სხვა პრობლემების თავიდან აცილების მიზნით. თუ ასეთი პრობლემები მაინც წარმოიშობა, მომხმარებლებს შეუძლიათ შეესწავლონ შესაბამისი მითითები განრიგის და მომსახურების შესახებ, რათა უზრუნველყოფილი იყოს საკვების რობოტის ნორმალური მუშაობა და მისი უფრო მეტი მომხმარებლის საჭიროებების დაკმაყოფილება.