Quali sono alcuni problemi comuni riscontrati nell’uso dei robot saldatori?
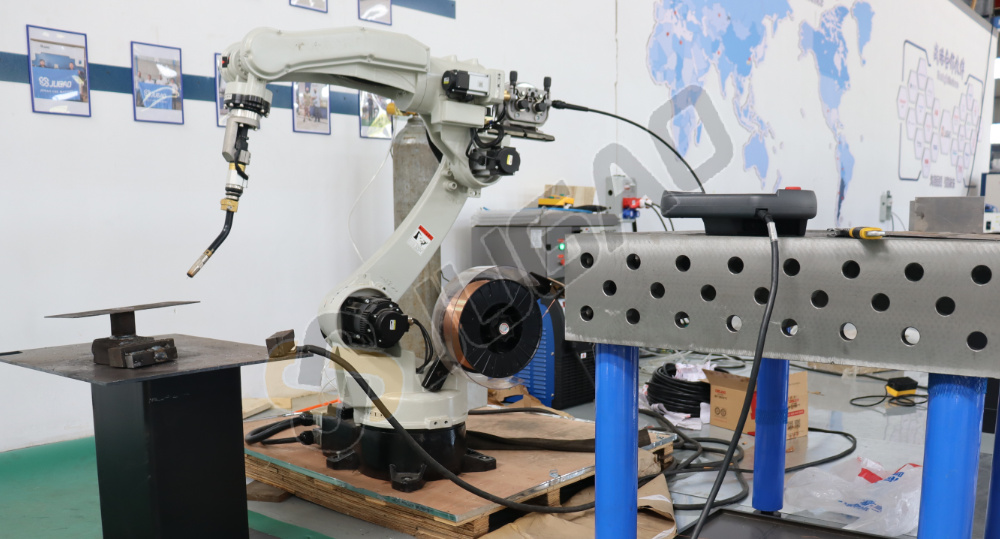
L'uso di robot per la saldatura non solo stabilizza e migliora la qualità della saldatura e aumenta l'efficienza produttiva, ma riduce anche i requisiti di competenza per i saldatori, abbreviando così il ciclo di preparazione per gli aggiornamenti dei prodotti e riducendo il corrispondente investimento in attrezzature. Quando si utilizzano apparecchiature per la saldatura robotizzata, possono verificarsi problemi come saldature fuori centro e intaccature a causa di un funzionamento improprio o di danni all'attrezzatura. Come vanno quindi gestiti questi problemi? Per aiutare gli utenti a risolvere tali problematiche riscontrate nell'utilizzo dei robot per la saldatura, esaminiamo più da vicino i contenuti specifici riportati di seguito.
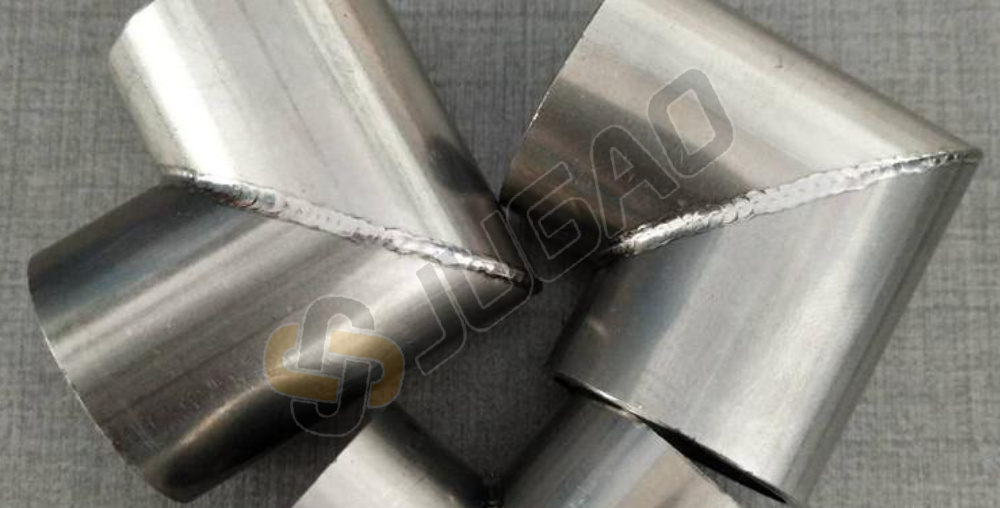
La saldatura fuori centro può essere dovuta a una posizione di saldatura errata o a problemi nella ricerca della torcia di saldatura. In questo caso, valutare se il TCP (punto centrale della torcia di saldatura) è accurato e procedere alla relativa regolazione. Se tale problema si verifica frequentemente, verificare la posizione zero di ciascun asse del robot e procedere alla sua taratura. L’incisione (undercut) può dipendere da un’impropria scelta dei parametri di saldatura, dall’angolo o dalla posizione errati della torcia di saldatura, che possono essere adeguatamente regolati. Una protezione gassosa insufficiente, uno strato di primer eccessivamente spesso sul pezzo in lavorazione o un’insufficiente essiccazione del gas di protezione possono anch’essi essere causati da tali problematiche; opportune regolazioni risolveranno il problema. Lo schizzo eccessivo (spatter) può essere causato da parametri di saldatura impropri del robot saldatore, da problemi relativi alla composizione del gas o da un’eccessiva lunghezza di fuoriuscita del filo d’apporto.
La regolazione della potenza della macchina consente di modificare i parametri di saldatura; la regolazione del rapporto tra i gas può essere effettuata tramite il flussometro, mentre la regolazione della posizione relativa tra la torcia di saldatura e il pezzo in lavorazione può risultare utile. Per risolvere il problema della formazione di un cratere d’arco all’estremità del cordone di saldatura dopo il raffreddamento, è possibile aggiungere una funzione di riempimento del cratere ad arco sommerso nei passaggi programmabili. Le collisioni della torcia possono dipendere da scostamenti nell’assemblaggio del pezzo in lavorazione o da un valore inaccurato del TCP (punto di controllo della torcia). Verificare l’installazione o modificare il TCP della torcia di saldatura può aiutare a risolvere il problema. I difetti dell’arco e l’impossibilità di accenderlo possono essere causati dal mancato contatto del filo di saldatura con il pezzo in lavorazione oppure da parametri di processo eccessivamente bassi. L’alimentazione manuale del filo, la regolazione della distanza tra la torcia di saldatura e il cordone di saldatura o la modifica dei parametri di processo possono contribuire a risolvere il problema.
Un allarme può indicare un problema con il sistema di monitoraggio del gas di protezione, con l'acqua di raffreddamento o con l'erogazione del gas di protezione. È fondamentale controllare le tubazioni dell'acqua di raffreddamento o del gas di protezione. Le tecniche di programmazione del robot saldatore devono prevedere una sequenza di saldatura ragionevole per ridurre al minimo la deformazione da saldatura e determinare la lunghezza del percorso di avanzamento della torcia saldante. Le transizioni spaziali della torcia saldante richiedono una traiettoria di movimento breve e fluida. Per ottimizzare i parametri di saldatura, vengono realizzati pezzi di prova per esperimenti di saldatura e verifica del processo. Si adottano un orientamento appropriato del posizionatore, una postura adeguata della torcia saldante e una posizione ottimale della torcia saldante rispetto al giunto. Dopo che il pezzo in lavorazione è stato fissato sul posizionatore, qualora la saldatura non si trovi nella posizione e nell’angolazione ideali, il posizionatore deve essere regolato continuamente durante la fase di programmazione, in modo da garantire che la saldatura raggiunga progressivamente una posizione orizzontale secondo la sequenza di saldatura.
Contemporaneamente, le posizioni degli assi del robot devono essere regolate in modo continuo per determinare in modo adeguato la posizione della torcia di saldatura, l’angolo e la lunghezza di estensione del filo rispetto al giunto. Una volta determinata la posizione del pezzo in lavorazione, la posizione della torcia di saldatura rispetto al giunto deve essere osservata visivamente dal programmatore, operazione piuttosto complessa. Risulta essenziale prevedere tempestivamente programmi di pulizia della torcia. Dopo aver scritto un programma di saldatura di una certa lunghezza, è necessario inserire prontamente un programma di pulizia della torcia per evitare che gli schizzi di saldatura otturino l’ugello di saldatura e la punta di contatto, garantendo così la pulizia della torcia, prolungando la vita utile dell’ugello, assicurando un’accensione affidabile dell’arco e riducendo gli schizzi di saldatura. La programmazione generalmente non può essere completata in un’unica fase; richiede invece verifiche e modifiche continue durante la saldatura robotizzata, con aggiustamenti dei parametri di saldatura e della posizione della torcia di saldatura, ecc., al fine di ottenere un programma ottimale. Il personale che utilizza i robot da saldatura deve adottare opportune precauzioni per evitare danni agli impianti, riduzione dell’efficienza lavorativa e altri problemi. Qualora tali inconvenienti si verifichino, gli utenti possono consultare le relative linee guida per la pianificazione e la manutenzione, al fine di garantire il funzionamento continuo e normale del robot da saldatura e soddisfare le esigenze di un numero sempre maggiore di utenti.