Apa saja masalah umum yang sering dijumpai saat menggunakan robot pengelasan?
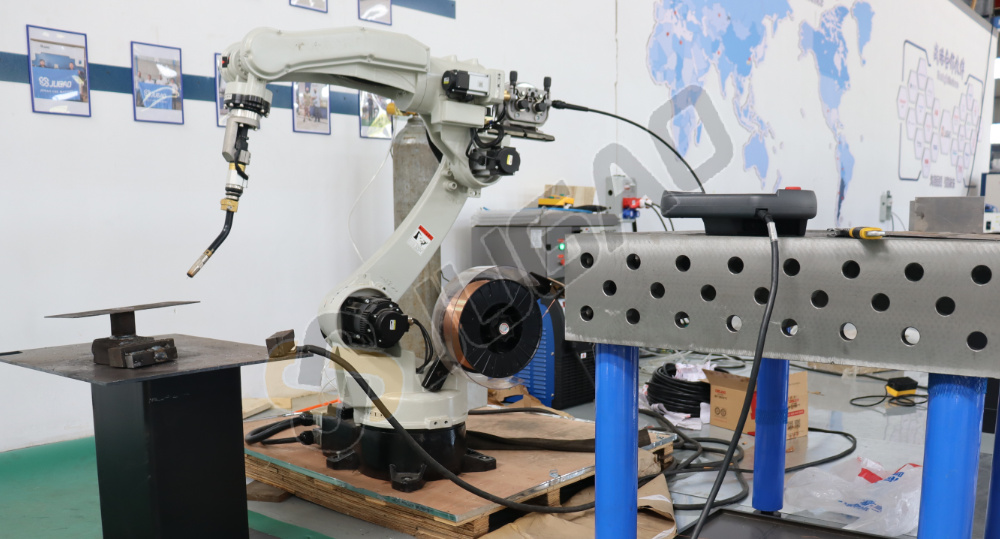
Penggunaan peralatan pengelasan berbasis robot tidak hanya dapat menstabilkan dan meningkatkan kualitas pengelasan serta meningkatkan efisiensi produksi, tetapi juga mengurangi persyaratan keahlian bagi tukang las, sehingga memperpendek siklus persiapan untuk peningkatan produk dan mengurangi investasi peralatan terkait. Saat menggunakan peralatan pengelasan berbasis robot, masalah seperti pengelasan tidak sentris dan undercut dapat terjadi akibat operasi yang tidak tepat atau kerusakan peralatan. Lalu, bagaimana cara menangani masalah-masalah ini? Untuk membantu pengguna mengatasi masalah-masalah yang muncul dalam penggunaan robot pengelasan, mari kita bahas lebih lanjut isi spesifik di bawah ini.
Pengelasan yang tidak berpusat dapat disebabkan oleh posisi pengelasan yang tidak tepat atau masalah pada pencarian torch las. Dalam hal ini, pertimbangkan apakah TCP (posisi titik pusat torch las) akurat dan sesuaikan secara tepat. Jika hal ini terjadi secara sering, periksa posisi nol masing-masing sumbu robot dan lakukan kalibrasi ulang. Kekurangan logam di tepi las (undercut) dapat disebabkan oleh pemilihan parameter pengelasan yang tidak tepat, sudut atau posisi torch las yang salah, yang dapat disesuaikan secara tepat. Pelindungan gas yang buruk, lapisan primer pada benda kerja yang terlalu tebal, atau kekurangan pengeringan gas pelindung juga dapat disebabkan oleh masalah-masalah tersebut; penyesuaian yang tepat akan mengatasi permasalahan ini. Percikan berlebihan (excessive spatter) dapat disebabkan oleh parameter pengelasan robot las yang tidak tepat, masalah komposisi gas, atau panjang ekstensi kawat las yang terlalu besar.
Menyesuaikan daya mesin dapat mengubah parameter pengelasan, menyesuaikan rasio gas menggunakan alat pengukur gas, dan menyesuaikan posisi relatif antara torch pengelasan dan benda kerja dapat membantu. Untuk masalah terbentuknya kawah busur (arc crater) di ujung las setelah pendinginan, fungsi kawah busur terbenam dapat ditambahkan ke langkah-langkah yang dapat diprogram guna mengisinya. Tabrakan torch kemungkinan disebabkan oleh penyimpangan perakitan benda kerja atau ketidakakuratan TCP torch (Torch Control Point). Memeriksa pemasangan atau memodifikasi TCP torch pengelasan dapat membantu. Cacat busur dan ketidakmampuan menyalakan busur kemungkinan disebabkan oleh kawat las yang tidak menyentuh benda kerja atau parameter proses yang terlalu rendah. Pemberian kawat las secara manual, menyesuaikan jarak antara torch pengelasan dan area las, atau menyesuaikan parameter proses dapat membantu.
Alarm dapat menunjukkan adanya masalah pada sistem pemantauan gas pelindung, air pendingin, atau pasokan gas pelindung. Memeriksa saluran air pendingin atau gas pelindung sangat penting. Teknik pemrograman robot pengelasan harus memilih urutan pengelasan yang wajar guna meminimalkan deformasi akibat pengelasan serta menentukan panjang lintasan pergerakan torch pengelasan. Transisi spasial torch pengelasan memerlukan lintasan gerak yang pendek dan halus. Untuk mengoptimalkan parameter pengelasan, dibuatkan benda uji guna eksperimen pengelasan dan verifikasi proses. Digunakan orientasi positioner yang tepat, sikap torch pengelasan, serta posisi torch pengelasan relatif terhadap sambungan. Setelah benda kerja dipasang pada positioner, jika jalur las tidak berada pada posisi dan sudut ideal, positioner perlu disesuaikan secara terus-menerus selama pemrograman agar jalur las secara bertahap mencapai posisi horizontal sesuai dengan urutan pengelasan.
Secara bersamaan, posisi sumbu robot harus terus-menerus disesuaikan untuk menentukan secara wajar posisi torch las, sudutnya, serta panjang ekstensi kawat las relatif terhadap sambungan. Setelah posisi benda kerja ditentukan, posisi torch las relatif terhadap sambungan harus diamati secara visual oleh pemrogram—suatu tugas yang cukup sulit. Program pembersihan torch yang tepat waktu sangat penting. Setelah menulis program pengelasan dengan panjang tertentu, program pembersihan torch harus segera dimasukkan guna mencegah percikan las menyumbat nosel las dan ujung kontak, sehingga menjaga kebersihan torch, memperpanjang masa pakai nosel, menjamin penyalaan busur yang andal, serta mengurangi percikan las. Pemrograman umumnya tidak dapat diselesaikan dalam satu tahap; diperlukan pemeriksaan dan modifikasi berkelanjutan selama pengelasan oleh robot, termasuk penyesuaian parameter pengelasan dan posisi torch las, guna menghasilkan program yang optimal. Personel yang menggunakan robot las wajib mengambil tindakan pencegahan guna menghindari kerusakan peralatan, penurunan efisiensi kerja, serta masalah lainnya. Jika masalah semacam itu terjadi, pengguna dapat merujuk pada pedoman terkait mengenai penjadwalan dan perawatan agar robot las tetap beroperasi secara normal serta memenuhi kebutuhan lebih banyak pengguna.