वेल्डिंग रोबोट का उपयोग करते समय कुछ सामान्य समस्याएँ क्या हैं?
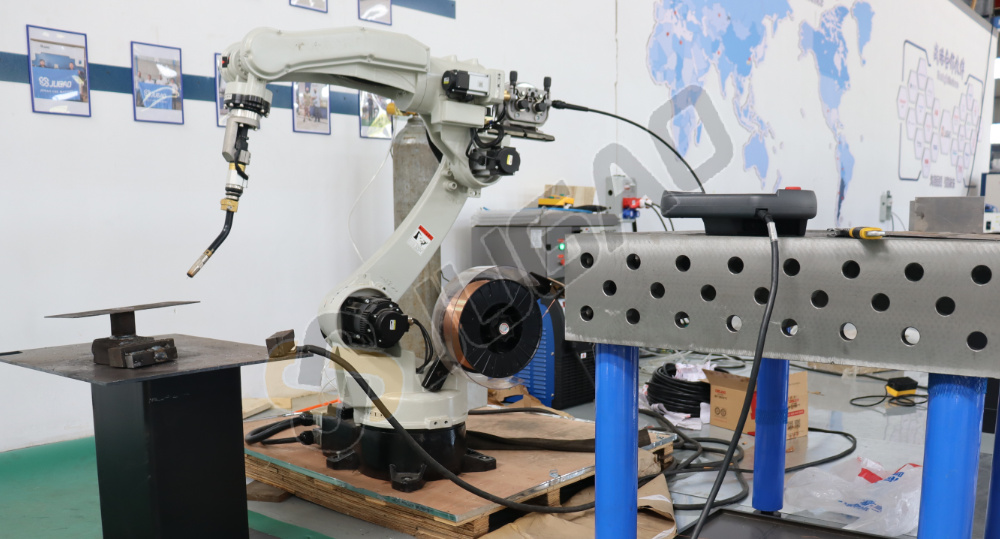
वेल्डिंग रोबोट के उपयोग से न केवल वेल्डिंग की गुणवत्ता को स्थिर और बेहतर बनाया जा सकता है और उत्पादन दक्षता में वृद्धि की जा सकती है, बल्कि वेल्डर्स के लिए कौशल आवश्यकताओं को भी कम किया जा सकता है, जिससे उत्पाद अपग्रेड के लिए तैयारी के चक्र को कम किया जा सकता है और संबंधित उपकरण निवेश को कम किया जा सकता है। रोबोटिक वेल्डिंग उपकरण के उपयोग के दौरान, गलत संचालन या उपकरण क्षति के कारण ऑफ-सेंटर वेल्डिंग और अंडरकट जैसी समस्याएँ हो सकती हैं। तो, इन समस्याओं को कैसे संभाला जाना चाहिए? वेल्डिंग रोबोट के उपयोग के दौरान उपयोगकर्ताओं द्वारा सामना की जाने वाली इन समस्याओं को संभालने में उनकी सहायता करने के लिए, आइए नीचे दी गई विशिष्ट सामग्री पर एक नज़र डालें।
ऑफ-सेंटर वेल्डिंग का कारण गलत वेल्डिंग स्थिति या वेल्डिंग टॉर्च की खोज में समस्याएँ हो सकती हैं। इस स्थिति में, विचार करें कि क्या टीसीपी (वेल्डिंग टॉर्च के केंद्र बिंदु की स्थिति) सही है और उसके अनुसार समायोजित करें। यदि यह समस्या बार-बार उत्पन्न होती है, तो रोबोट के प्रत्येक अक्ष की शून्य स्थिति की जाँच करें और उसे पुनः कैलिब्रेट करें। अंडरकट का कारण वेल्डिंग पैरामीटर्स का अनुचित चयन, वेल्डिंग टॉर्च का गलत कोण या स्थिति हो सकता है, जिसे उचित रूप से समायोजित किया जा सकता है। दुर्बल गैस शील्डिंग, कार्य-टुकड़े पर अत्यधिक मोटी प्राइमर परत, या शील्डिंग गैस का अपर्याप्त शुष्कन भी इन्हीं समस्याओं के कारण हो सकता है; उचित समायोजनों से यह समस्या दूर की जा सकती है। अत्यधिक स्पैटर का कारण वेल्डिंग रोबोट के अनुचित वेल्डिंग पैरामीटर्स, गैस संरचना संबंधी समस्याएँ या वेल्डिंग तार का अत्यधिक लंबा बाहर निकलना हो सकता है।
मशीन की शक्ति को समायोजित करने से वेल्डिंग पैरामीटर्स को संशोधित किया जा सकता है, गैस मीटर का उपयोग करके गैस अनुपात को समायोजित करना, और वेल्डिंग टॉर्च तथा कार्य-टुकड़े की सापेक्ष स्थिति को समायोजित करना सहायक हो सकता है। वेल्ड के अंत में ठंडा होने के बाद आर्क क्रेटर के निर्माण की समस्या के लिए, क्रेटर को भरने के लिए प्रोग्रामेबल चरणों में एक सबमर्ज्ड आर्क क्रेटर फ़ंक्शन जोड़ा जा सकता है। गन टक्करों का कारण कार्य-टुकड़े की असेंबली में विचलन या अशुद्ध वेल्डिंग टॉर्च टीसीपी (टॉर्च कंट्रोल पॉइंट) हो सकता है। स्थापना की जाँच करना या वेल्डिंग टॉर्च टीसीपी को संशोधित करना सहायक हो सकता है। आर्क दोष और आर्क को प्रज्वलित न कर पाने की अक्षमता का कारण वेल्डिंग तार का कार्य-टुकड़े के साथ संपर्क न होना या प्रक्रिया पैरामीटर्स का अत्यधिक कम होना हो सकता है। मैनुअल तार फीडिंग, वेल्डिंग टॉर्च और वेल्ड के बीच की दूरी को समायोजित करना, या प्रक्रिया पैरामीटर्स को समायोजित करना सहायक हो सकता है।
एक अलार्म शील्डिंग गैस मॉनिटरिंग प्रणाली, शीतलन जल या शील्डिंग गैस आपूर्ति के साथ किसी समस्या को इंगित कर सकता है। शीतलन जल या शील्डिंग गैस लाइनों की जाँच करना अत्यंत महत्वपूर्ण है। वेल्डिंग रोबोट प्रोग्रामिंग तकनीकों को वेल्डिंग विकृति को न्यूनतम करने के लिए एक उचित वेल्डिंग क्रम का चयन करना चाहिए और वेल्डिंग टॉर्च के यात्रा पथ की लंबाई निर्धारित करनी चाहिए। वेल्डिंग टॉर्च के त्रिआयामी स्थानांतरण के लिए एक छोटा और चिकना गति पथ आवश्यक होता है। वेल्डिंग पैरामीटर के अनुकूलन के लिए, वेल्डिंग प्रयोगों और प्रक्रिया सत्यापन के लिए परीक्षण नमूने बनाए जाते हैं। जोड़ के सापेक्ष उचित पोजीशनर अभिविन्यास, वेल्डिंग टॉर्च की मुद्रा और वेल्डिंग टॉर्च की स्थिति को अपनाया जाता है। जब कार्य-टुकड़ा को पोजीशनर पर स्थापित कर दिया जाता है, तो यदि वेल्ड सीम (जोड़) आदर्श स्थिति और कोण में नहीं है, तो प्रोग्रामिंग के दौरान पोजीशनर को लगातार समायोजित करने की आवश्यकता होती है, ताकि वेल्ड सीम वेल्डिंग क्रम के अनुसार क्रमशः क्षैतिज स्थिति में पहुँच जाए।
इसके साथ ही, रोबोट के अक्षों की स्थितियों को लगातार समायोजित करना आवश्यक है ताकि जोड़ के संबंध में वेल्डिंग टॉर्च की स्थिति, कोण और तार की बाहरी लंबाई को उचित रूप से निर्धारित किया जा सके। जब कार्य-टुकड़े की स्थिति निर्धारित कर ली जाती है, तो प्रोग्रामर को जोड़ के संबंध में वेल्डिंग टॉर्च की स्थिति का दृश्य निरीक्षण करना आवश्यक होता है, जो काफी कठिन होता है। समय पर टॉर्च सफाई कार्यक्रमों का होना अत्यावश्यक है। किसी निश्चित लंबाई के वेल्डिंग प्रोग्राम को लिखने के बाद, वेल्डिंग नॉजल और संपर्क टिप को वेल्डिंग स्पैटर से अवरुद्ध होने से रोकने के लिए तुरंत एक टॉर्च सफाई कार्यक्रम दर्ज करना चाहिए, जिससे टॉर्च की सफाई सुनिश्चित हो, नॉजल का जीवनकाल बढ़े, विश्वसनीय आर्क प्रज्वलन सुनिश्चित हो और वेल्डिंग स्पैटर कम हो। प्रोग्रामिंग सामान्यतः एक ही चरण में पूरी नहीं की जा सकती; इसके लिए रोबोट वेल्डिंग के दौरान निरंतर जाँच और संशोधन की आवश्यकता होती है, जिसमें वेल्डिंग पैरामीटर और वेल्डिंग टॉर्च की मुद्रा आदि को समायोजित करना शामिल है, ताकि एक अच्छा प्रोग्राम तैयार किया जा सके। वेल्डिंग रोबोट का उपयोग करने वाले कर्मचारियों को उपकरण क्षति, कार्य दक्षता में कमी और अन्य समस्याओं से बचने के लिए सावधानियाँ बरतनी चाहिए। यदि ऐसी समस्याएँ उत्पन्न हो जाती हैं, तो उपयोगकर्ता रोबोट के सामान्य संचालन को जारी रखने और अधिक उपयोगकर्ताओं की आवश्यकताओं को पूरा करने के लिए नियोजन और रखरखाव से संबंधित प्रासंगिक दिशानिर्देशों का संदर्भ ले सकते हैं।