Cales son algúns dos problemas comúns que se atopan ao usar robots de soldadura?
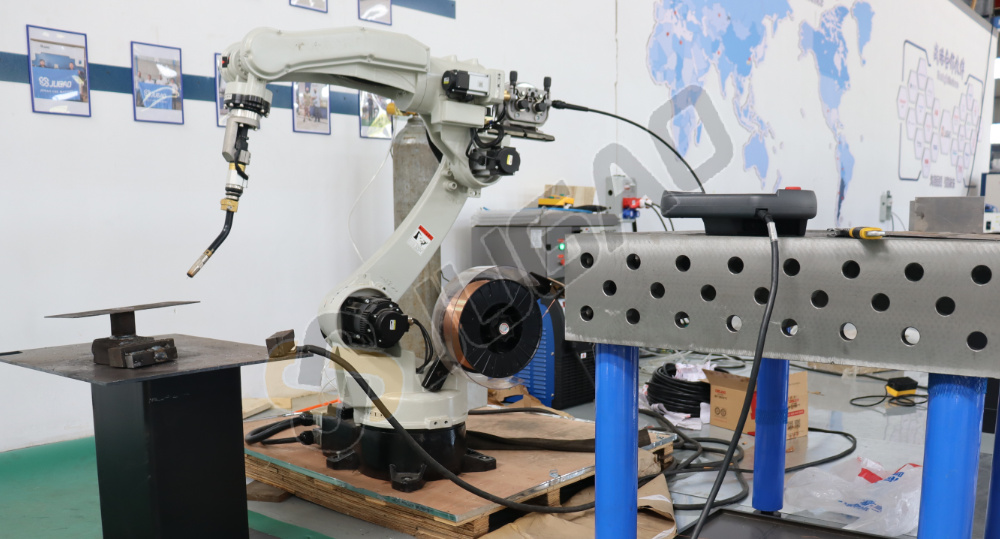
O uso de robots de soldadura non só pode estabilizar e mellorar a calidade da soldadura e aumentar a eficiencia produtiva, senón que tamén reduce os requisitos de cualificación dos soldadores, acurtando así o ciclo de preparación para as actualizacións de produtos e reducindo o investimento correspondente en equipos. Ao utilizar equipos de soldadura robótica, poden producirse problemas como soldaduras descentradas ou mordeduras debido a unha operación incorrecta ou a danos no equipo. Entón, como se deben resolver estes problemas? Para axudar aos usuarios a facer fronte a estes problemas atopados no uso de robots de soldadura, examinemos máis de cerca os contidos específicos que se indican a continuación.
A soldadura descentrada pode deberse a unha posición incorrecta de soldadura ou a problemas na busca da pistola de soldadura. Neste caso, considere se o TCP (posición do punto central da pistola de soldadura) é preciso e axústelo en consecuencia. Se isto ocorre con frecuencia, comprobe a posición de cero de cada eixe do robot e recaleíbreo. O socavamento pode deberse a unha selección inadecuada dos parámetros de soldadura, a un ángulo ou posición incorrectos da pistola de soldadura, o que se pode axustar convenientemente. Unha protección gasosa deficiente, un imprimación excesivamente espesa na peza de traballo ou un secado insuficiente do gas protector tamén poden ser causados por estes problemas; os axustes apropiados resolverán o problema. Unha salpicadura excesiva pode deberse a parámetros de soldadura inadecuados do robot de soldadura, a problemas na composición do gas ou a unha extensión excesivamente longa do fío de soldadura.
Axustar a potencia da máquina pode modificar os parámetros de soldadura, axustar a proporción de gas mediante o caudalímetro de gas e axustar a posición relativa da pistola de soldadura e a peça de traballo pode axudar. Para o problema da formación dun cráter de arco no extremo da soldadura despois do arrefriamento, pódese engadir unha función de cráter de arco submerso nos pasos programables para encherlo. As colisiónes da pistola poden deberse a desviacións no montaxe da peça de traballo ou a un punto de control da pistola (TCP, Torch Control Point) impreciso. Verificar a instalación ou axustar o TCP da pistola de soldadura pode axudar. Os defectos de arco e a incapacidade de encender o arco poden deberse a que o fío de soldadura non está en contacto coa peça de traballo ou a que os parámetros do proceso son excesivamente baixos. A alimentación manual do fío, axustar a distancia entre a pistola de soldadura e a soldadura ou axustar os parámetros do proceso pode axudar.
Unha alarma pode indicar un problema co sistema de monitorización do gas de proteción, coa auga de refrigeración ou co fornecemento de gas de proteción. É fundamental comprobar as liñas de auga de refrigeración ou de gas de proteción. As técnicas de programación de robots de soldadura deben seleccionar unha secuencia de soldadura razoable para minimizar a deformación da soldadura e determinar a lonxitude da traxectoria do puntero de soldadura. As transicións espaciais do puntero de soldadura requiren unha traxectoria de movemento curta e suave. Para optimizar os parámetros de soldadura, fabrícanse pezas de proba para experimentos de soldadura e verificación de procesos. Adoptanse unha orientación axeitada do posicionador, unha postura axeitada do puntero de soldadura e unha posición axeitada do puntero de soldadura respecto á xunta. Despois de fixar a peça de traballo no posicionador, se a corda de soldadura non está na posición e ángulo ideais, o posicionador debe axustarse continuamente durante a programación para asegurar que a corda de soldadura alcance gradualmente unha posición horizontal segundo a secuencia de soldadura.
Ao mesmo tempo, as posicións dos eixos do robot deben axustarse continuamente para determinar de forma razoable a posición da tocha de soldadura, o seu ángulo e a lonxitude de extensión do fío en relación coa xunta. Despois de determinar a posición da peza de traballo, a posición da tocha de soldadura en relación coa xunta debe observarse visualmente polo programador, o que resulta bastante difícil. Os programas de limpeza oportuna da tocha son esenciais. Tras escribir un programa de soldadura dunha certa lonxitude, debe introducirse prontamente un programa de limpeza da tocha para evitar que as salpicaduras de soldadura obstrúan a boquilla e a punta de contacto da tocha, garantindo así a limpeza desta, mellorando a vida útil da boquilla, asegurando un encendido fiable do arco e reducindo as salpicaduras de soldadura. A programación xeralmente non se pode completar nun só paso; require comprobacións e modificacións continuas durante a soldadura con robot, axustando parámetros de soldadura e a postura da tocha de soldadura, entre outros aspectos, para elaborar un bo programa. O persoal que utiliza robots de soldadura debe tomar precaucións para evitar danos nos equipos, redución da eficiencia no traballo e outros problemas. Se ocorren tales problemas, os usuarios poden consultar as correspondentes directrices sobre planificación e mantemento para garantir que o robot de soldadura poida seguir operando normalmente e satisfacer as necesidades dun maior número de usuarios.