What are the main components of a welding robot?
Welding robots are common and widely used welding equipment in the welding field. Compared to traditional welding, welding robots are much faster. A welding robot mainly consists of two parts: the robot body and the automated welding equipment. Welding robots are modern, automated devices integrating computer science, electronics, sensors, artificial intelligence, and other technologies. They easily achieve stable and improved welding results, enabling 24-hour continuous production, significantly increasing production efficiency, and replacing manual labor in hazardous environments for extended periods. Welding robots directly used for welding include those for electric arc welding, resistance welding, and gas welding.
Welding Robots
I. Components of a Welding Robot
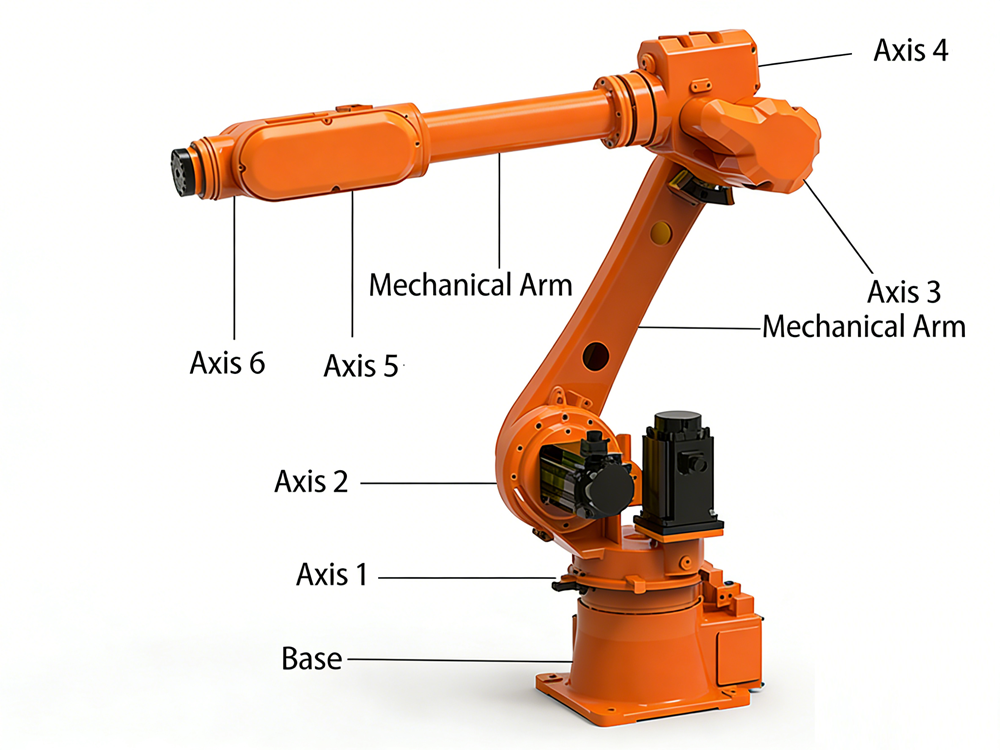
1. Actuating Part: This is the mechanical structure that transmits force or torque and performs specific actions to complete the welding task. It includes the robot's body, arm, wrist, and hand.

2. Control Part: This is the electronic and electrical components and computer system responsible for controlling the mechanical structure to complete the welding operation within a specified program and trajectory.

3. Power Source and Transmission Section: This section comprises components and devices that provide and transmit mechanical energy to the actuators. The power source is typically electric or hydraulic.

4. Process Support Section: This mainly includes the robot welding power supply, wire feeder, and gas supply device.

II. Selection of Degrees of Freedom for Welding Robots
The arm and wrist of a welding robot are the basic motion components. Any robot arm design has three degrees of freedom to ensure that the end effector can reach any point within its working range. The three degrees of freedom of the wrist are rotational movements about three mutually perpendicular coordinate axes X, Y, and Z in space, commonly referred to as roll, pitch, and yaw movements.