برخی از مشکلات رایج در استفاده از رباتهای جوشکاری چیست؟
استفاده از رباتهای جوشکاری نهتنها میتواند کیفیت جوشکاری را تثبیت و بهبود بخشد و بازده تولید را افزایش دهد، بلکه نیاز به مهارتهای بالای جوشکاران را کاهش داده و در نتیجه دوره آمادهسازی برای ارتقای محصولات را کوتاهتر کرده و سرمایهگذاری مربوط به تجهیزات را کاهش میدهد. هنگام استفاده از تجهیزات جوشکاری رباتیک، مشکلاتی مانند جوش خارج از مرکز و زیرجوش (آندروت) ممکن است به دلیل عملیات نادرست یا آسیب دیدن تجهیزات رخ دهد. پس چگونه باید این مشکلات را برطرف کرد؟ برای کمک به کاربران در حل این مشکلاتی که در حین استفاده از رباتهای جوشکاری با آنها مواجه میشوند، در ادامه بهطور دقیقتر به محتوای خاص این موضوع میپردازیم.
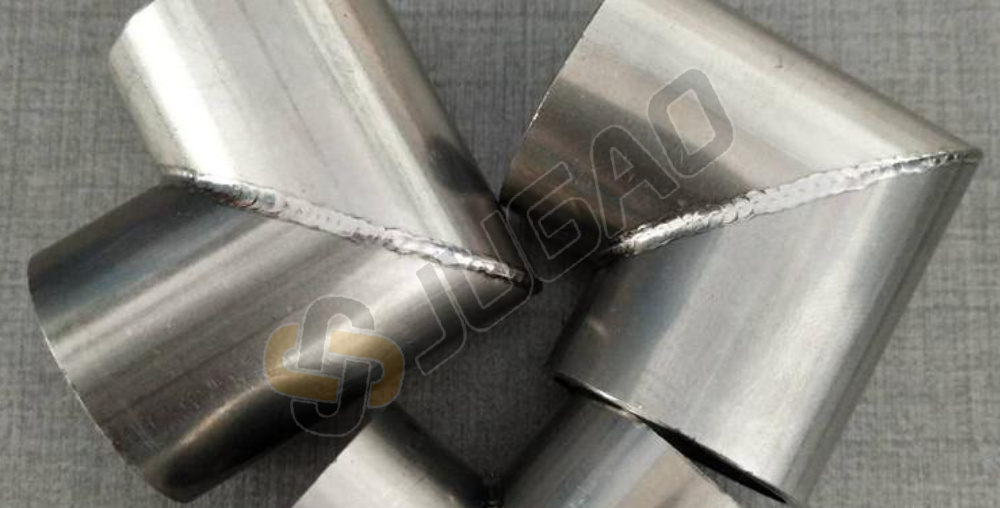
جوشکاری خارج از مرکز ممکن است ناشی از موقعیت نادرست جوشکاری یا مشکلات موجود در جستجوی نازل جوشکاری باشد. در این حالت، باید صحت موقعیت TCP (نقطه مرکزی نازل جوشکاری) بررسی و در صورت لزوم تنظیم شود. اگر این اتفاق بهطور مکرر رخ دهد، موقعیت صفر هر محور ربات را بررسی کرده و آن را دوباره کالیبره نمایید. ایجاد شیار (Undercut) ممکن است ناشی از انتخاب نادرست پارامترهای جوشکاری، زاویه یا موقعیت نادرست نازل جوشکاری باشد که میتوان آنها را بهطور مناسب تنظیم کرد. محافظت نامناسب گازی، وجود پرایمر بسیار ضخیم روی قطعه کار یا خشکنشدن کافی گاز محافظ نیز میتواند ناشی از این مشکلات باشد؛ انجام تنظیمات مناسب این مشکل را برطرف میکند. پاشش بیش از حد ممکن است ناشی از پارامترهای نادرست جوشکاری ربات جوشکاری، مشکلات ترکیب گاز یا طول بیش از حد امتداد سیم جوشکاری باشد.
تنظیم توان دستگاه میتواند پارامترهای جوشکاری را تغییر دهد؛ تنظیم نسبت گاز با استفاده از دебیمتر گاز و تنظیم موقعیت نسبی مشعل جوشکاری و قطعه کار نیز میتواند کمککننده باشد. برای مشکل تشکیل حفره قوس در انتهای جوش پس از سرد شدن، میتوان عملکرد «حفره قوس غوطهور» را به مراحل برنامهپذیر اضافه کرد تا این حفره پر شود. برخورد مشعل ممکن است ناشی از انحراف در مونتاژ قطعه کار یا نادرست بودن نقطه کنترل مشعل (TCP) باشد. بررسی نصب یا اصلاح نقطه کنترل مشعل (TCP) میتواند کمککننده باشد. نقصهای قوس و عدم امکان ایجاد قوس ممکن است ناشی از عدم تماس سیم جوش با قطعه کار یا بسیار پایین بودن پارامترهای فرآیندی باشد. تغذیه دستی سیم جوش، تنظیم فاصله بین مشعل جوشکاری و محل جوش یا تنظیم پارامترهای فرآیندی میتواند کمککننده باشد.
هشدار ممکن است نشاندهندهی مشکلی در سیستم نظارت بر گاز محافظ، آب خنککننده یا تأمین گاز محافظ باشد. بررسی خطوط آب خنککننده یا گاز محافظ امری مهمی است. روشهای برنامهریزی ربات جوشکاری باید ترتیب منطقی جوشکاری را انتخاب کنند تا تغییر شکل ناشی از جوشکاری به حداقل برسد و طول مسیر حرکت مشعل جوشکاری تعیین شود. انتقالهای فضایی مشعل جوشکاری نیازمند مسیر حرکتی کوتاه و نرم هستند. برای بهینهسازی پارامترهای جوشکاری، قطعات آزمایشی برای انجام آزمایشهای جوشکاری و تأیید فرآیند ساخته میشوند. جهتگیری مناسب پوزیشنر، وضعیت مشعل جوشکاری و موقعیت مشعل جوشکاری نسبت به درز جوش اتخاذ میشوند. پس از ثابتکردن قطعهی کار روی پوزیشنر، اگر درز جوش در موقعیت و زاویهی ایدهآل قرار نداشته باشد، در حین برنامهریزی باید پوزیشنر بهطور مداوم تنظیم شود تا درز جوش بهتدریج و مطابق با ترتیب جوشکاری به موقعیت افقی برسد.
در عین حال، باید موقعیت محورهای ربات بهطور مداوم تنظیم شود تا موقعیت مشعل جوشکاری، زاویهٔ آن و طول امتداد سیم نسبت به درز جوش بهصورت منطقی تعیین شود. پس از تعیین موقعیت قطعهٔ کار، برنامهنویس باید موقعیت مشعل جوشکاری را نسبت به درز جوش بهصورت بصری مشاهده کند که این کار بسیار دشوار است. اجرای بهموقع برنامههای پاکسازی مشعل ضروری است. پس از نوشتن یک برنامهٔ جوشکاری با طول معین، باید بهسرعت یک برنامهٔ پاکسازی مشعل وارد شود تا از انسداد نوک جوشکاری و نوک تماس توسط پاشش جوشکاری جلوگیری شود؛ این امر به حفظ پاکی مشعل، افزایش عمر نوک جوشکاری، تضمین روشنشدن قابلاطمینان قوس الکتریکی و کاهش پاشش جوشکاری کمک میکند. عموماً نوشتن برنامهٔ جوشکاری در یک مرحله امکانپذیر نیست و نیازمند بررسی و اصلاح مداوم در حین جوشکاری توسط ربات، تنظیم پارامترهای جوشکاری و وضعیت مشعل جوشکاری و غیره است تا یک برنامهٔ مؤثر ایجاد شود. افرادی که از رباتهای جوشکاری استفاده میکنند باید اقدامات پیشگیرانهای انجام دهند تا از آسیب به تجهیزات، کاهش بازدهی کار و سایر مشکلات جلوگیری شود. در صورت بروز چنین مشکلاتی، کاربران میتوانند به راهنماییهای مربوطه در زمینهٔ زمانبندی و نگهداری مراجعه کنند تا اطمینان حاصل شود که ربات جوشکاری بهطور طبیعی ادامهٔ فعالیت خود را داشته و نیازهای تعداد بیشتری از کاربران را برآورده سازد.