Millised on levinumad probleemid, millega tuleb kokku puutuda keevitusrobotite kasutamisel?
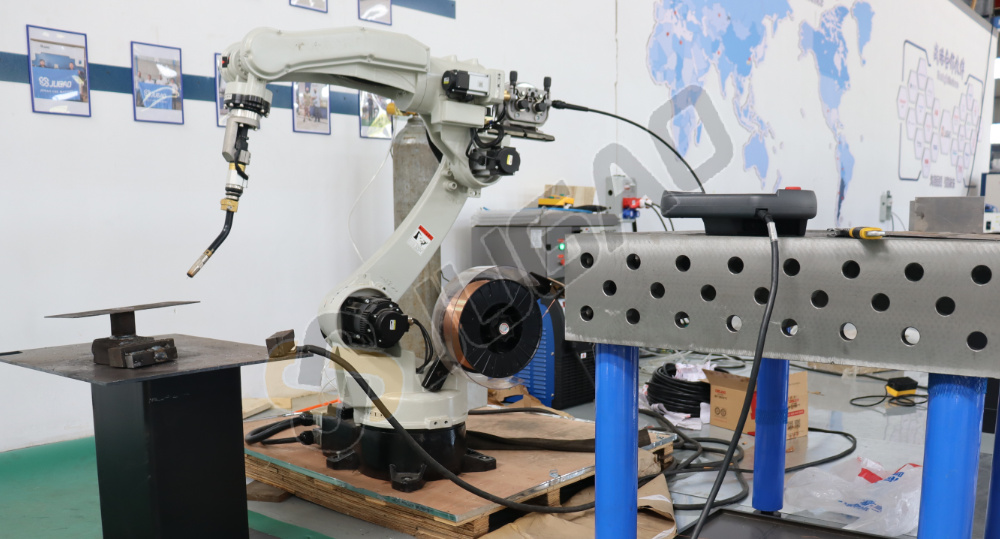
Keermeautomaatide kasutamine võimaldab mitte ainult keevituskvaliteedi stabiilsust ja parandamist ning tootmisefektiivsuse suurendamist, vaid ka keevitajate kvalifikatsiooninõuete alandamist, mis lühendab tooteuuenduste ettevalmistusperioodi ja vähendab vastavaid seadmete investeeringuid. Robootilise keevitusseadme kasutamisel võivad tekkida probleemid, nagu keskelt ära keevitamine ja allakeevitus, mis on põhjustatud ebaõigest käsitsemisest või seadme kahjustumisest. Kuidas tuleb neid probleeme lahendada? Et aidata kasutajatel toime tulla keermeautomaatide kasutamisel tekkinud probleemidega, vaatame allpool täpsemalt konkreetset sisu.
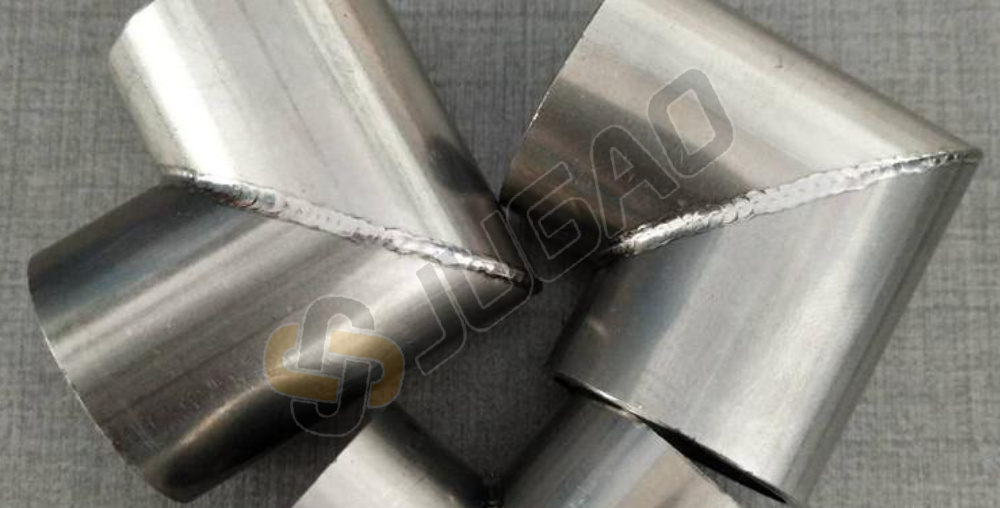
Kõrvale kallutatud keevitus võib olla tingitud valest keevitusasendist või keevituspüstoli otsinguprobleemidest. Sel juhul tuleb kaaluda, kas TCP (keevituspüstoli keskpunkti asukoht) on täpne, ja seda vastavalt korrigeerida. Kui see juhtub sageli, tuleb kontrollida roboti iga telje nullasendit ja teha selle uuesti kalibreerimine. Alakeevitus võib olla tingitud ebaõigest keevitusparameetrite valikust, valest keevituspüstoli nurgast või asendist, mida saab vastavalt kohandada. Halb gaasikaitse, töödeldaval detailil liiga paks aluskiht või kaitsegaasi ebapiisav kuivatamine võivad samuti olla nende probleemide tagajärjed; sobivad kohandused lahendavad probleemi. Liialine sügavus võib olla tingitud keevitusroboti ebaõigetest keevitusparameetritest, gaasi koostise probleemidest või liiga pikkadest keevitusjuhtmete väljaulatustest.
Masina võimsuse reguleerimisega saab muuta keevitusparameetreid, gaasiprotsendi reguleerimiseks kasutada gaasimeedrit ja keevituspüstoli ning töödeldava detaili suhtelist asendit reguleerides saab kaasaegselt aidata. Kui keevituslõpus tekib pärast jahtumist kaarekrater, siis programmieruvatesse sammudesse saab lisada süvendatud kaarekrateri funktsiooni, et seda täita. Püstoli kokkupõrked võivad olla tingitud töödeldava detaili paigalduse kõrvalekaldumisest või keevituspüstoli TCP-st (Torch Control Point – püstoli juhtpunkti) ebatäpsusest. Paigalduse kontrollimine või keevituspüstoli TCP muutmine võib aidata. Kaarepuudused ja kaare süttimatuks jäämine võivad olla tingitud keevitusdraadist, mis ei puutu töödeldavasse detaili, või liialt madalatest protsessiparameetritest. Käsitsi draadi sisestamine, keevituspüstoli ja keevitusliite vahelise kauguse reguleerimine või protsessiparameetrite muutmine võib aidata.
Häireteade võib viidata probleemile kaitsegaasi jälgimissüsteemis, jahutusvees või kaitsegaasi tarnes. Jahutusvee või kaitsegaasi torustiku kontrollimine on oluline. Keermeautomaadi programmeerimistehnikad peaksid valima mõistliku keevitusjärjekorra, et vähendada keevitusdeformatsiooni, ning määrama keevituspüstoli liikumise teepikkuse. Keevituspüstoli ruumilised üleminekud nõuavad lühikest ja siledat liikumisteed. Keerme parameetrite optimeerimiseks valmistatakse keevituskatsete ja protsessi kinnitamiseks katseosad. Kasutatakse sobivat positsioneerija orientatsiooni, keevituspüstoli asendit ja keevituspüstoli asukohta liite suhtes. Pärast töödeldava detaili kinnitamist positsioneerijale tuleb positsioneerijat programmeerimise käigus pidevalt kohandada, kui õmblus ei asu ideaalses asukohas ja nurgas, et tagada õmbluse järkjärguline jõudmine horisontaalsele asendile vastavalt keevitusjärjekorrale.
Samal ajal tuleb roboti telgede asendeid pidevalt kohandada, et määrata keevituspüstoli asukoht, nurk ja juhtme ulatus liite suhtes mõistlikul viisil. Pärast töödeldava detaili asukoha määramist tuleb keevituspüstoli asukohta liite suhtes vaadata visuaalselt programmeerija poolt, mis on üsna keeruline. Õigeaegsed püstoli puhastusprogrammid on olulised. Pärast teatud pikkusega keevitusprogrammi koostamist tuleb kiiresti sisestada püstoli puhastusprogramm, et vältida keevituspritsmete kogunemist keevitusnõusse ja kontaktotstesse, tagades püstoli puhtuse, parandades nõu eluiga, tagades usaldusväärse kaare süttimise ning vähendades keevituspritsmeid. Programmeerimist ei saa tavaliselt täielikult lõpetada ühes etapis; selleks on vajalik pidev kontroll ja muutmine roboti keevitamise ajal, sealhulgas keevitusparameetrite ja keevituspüstoli asendi kohandamine jne, et luua hea programm. Isikud, kes kasutavad keevitusrobotit, peaksid võtma etteabindeid seadme kahjustuste, tööefektiivsuse vähenemise ja muude probleemide vältimiseks. Kui sellised probleemid ikkagi tekivad, saavad kasutajad pöörduda vastavate juhiste poole planeerimise ja hoolduse osas, et tagada keevitusroboti normaalne töö jätkumine ning rahuldada rohkemate kasutajate vajadusi.