¿Cuáles son algunos problemas comunes que surgen al utilizar robots de soldadura?
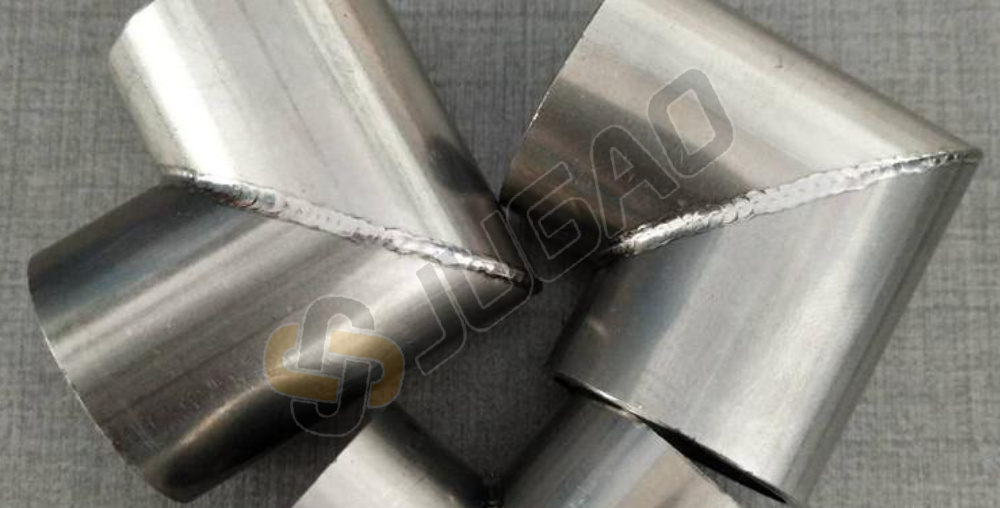
El uso de robots de soldadura no solo puede estabilizar y mejorar la calidad de la soldadura y aumentar la eficiencia productiva, sino que también reduce los requisitos de habilidad para los soldadores, acortando así el ciclo de preparación para las actualizaciones de productos y reduciendo la inversión correspondiente en equipos. Al utilizar equipos de soldadura robótica, pueden surgir problemas como soldaduras descentradas y mordeduras debido a una operación inadecuada o a daños en el equipo. Entonces, ¿cómo deben abordarse estos problemas? Para ayudar a los usuarios a resolverlos, analicemos detenidamente a continuación el contenido específico.
La soldadura descentrada puede deberse a una posición incorrecta de soldadura o a problemas con la búsqueda de la pistola de soldadura. En este caso, considere si el TCP (punto central de la pistola de soldadura) es preciso y ajústelo en consecuencia. Si esto ocurre con frecuencia, verifique la posición de cero de cada eje del robot y recalíbrelo. El socavado puede deberse a una selección inadecuada de los parámetros de soldadura, a un ángulo o posición incorrectos de la pistola de soldadura, lo cual puede ajustarse adecuadamente. Una protección gaseosa deficiente, una imprimación excesivamente gruesa sobre la pieza de trabajo o una insuficiente desecación del gas de protección también pueden ser causadas por estos factores; los ajustes apropiados resolverán el problema. La proyección excesiva de salpicaduras puede deberse a parámetros de soldadura inadecuados del robot de soldadura, a problemas con la composición del gas o a una longitud excesiva de la extensión del alambre de soldadura.
Ajustar la potencia de la máquina puede modificar los parámetros de soldadura; ajustar la relación de gases mediante el caudalímetro de gas y ajustar la posición relativa de la pistola de soldadura y la pieza de trabajo también pueden ayudar. Para el problema de la formación de un cráter de arco en el extremo de la soldadura tras el enfriamiento, se puede incorporar una función de relleno de cráter de arco sumergido en los pasos programables para completarlo. Las colisiones de la pistola pueden deberse a desviaciones en el montaje de la pieza de trabajo o a una configuración inexacta del TCP (punto de control de la pistola) de la pistola de soldadura. Verificar la instalación o modificar el TCP de la pistola de soldadura puede ayudar. Los defectos del arco y la imposibilidad de encenderlo pueden deberse a que el alambre de soldadura no entra en contacto con la pieza de trabajo o a que los parámetros del proceso son excesivamente bajos. La alimentación manual del alambre, el ajuste de la distancia entre la pistola de soldadura y la zona de soldadura o el ajuste de los parámetros del proceso pueden ayudar.
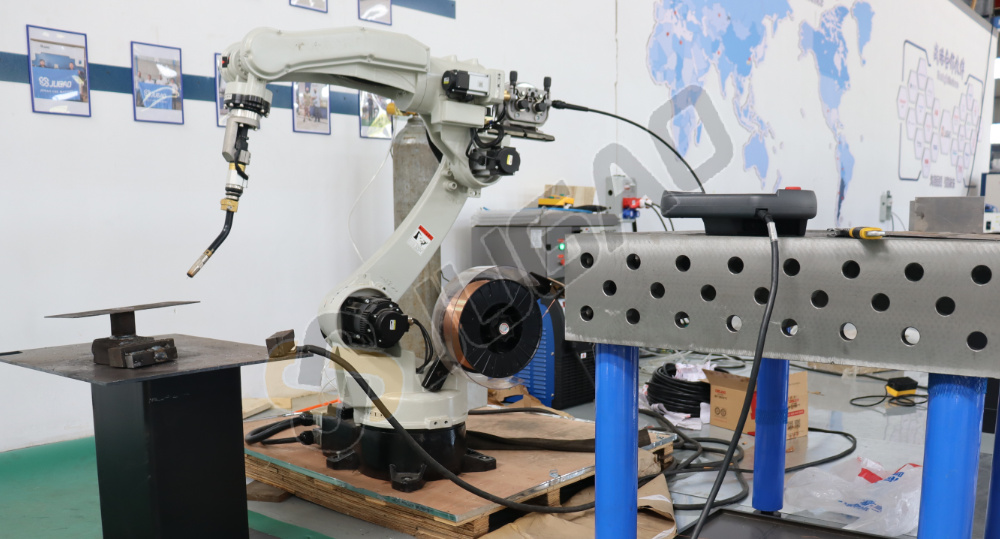
Una alarma puede indicar un problema con el sistema de monitorización del gas de protección, el agua de refrigeración o el suministro de gas de protección. Es fundamental comprobar las tuberías de agua de refrigeración o de gas de protección. Las técnicas de programación del robot de soldadura deben seleccionar una secuencia de soldadura razonable para minimizar la deformación por soldadura y determinar la longitud de la trayectoria del soplete de soldadura. Las transiciones espaciales del soplete de soldadura requieren una trayectoria de movimiento corta y suave. Para optimizar los parámetros de soldadura, se fabrican piezas de ensayo destinadas a experimentos de soldadura y verificación del proceso. Se adoptan una orientación adecuada del posicionador, una postura adecuada del soplete de soldadura y una posición adecuada del soplete de soldadura respecto a la junta. Tras fijar la pieza de trabajo en el posicionador, si la costura de soldadura no se encuentra en la posición y ángulo ideales, es necesario ajustar continuamente el posicionador durante la programación para garantizar que la costura de soldadura alcance progresivamente una posición horizontal según la secuencia de soldadura.
Al mismo tiempo, las posiciones de los ejes del robot deben ajustarse continuamente para determinar de forma razonable la posición, el ángulo y la longitud de extensión del alambre de la pistola de soldadura respecto a la junta. Una vez determinada la posición de la pieza de trabajo, el programador debe observar visualmente la posición de la pistola de soldadura respecto a la junta, lo cual resulta bastante difícil. Los programas de limpieza oportuna de la pistola son esenciales. Tras escribir un programa de soldadura de cierta longitud, debe introducirse inmediatamente un programa de limpieza de la pistola para evitar que las salpicaduras de soldadura obstruyan la boquilla y la punta de contacto de la pistola, garantizando así su limpieza, prolongando la vida útil de la boquilla, asegurando una ignición fiable del arco y reduciendo las salpicaduras de soldadura. La programación generalmente no puede completarse en un solo paso; requiere verificaciones y modificaciones continuas durante la soldadura con robot, ajustando parámetros de soldadura y la postura de la pistola de soldadura, entre otros aspectos, para elaborar un buen programa. El personal que utilice robots de soldadura debe tomar precauciones para evitar daños en los equipos, una reducción de la eficiencia operativa y otros problemas. Si tales problemas llegan a ocurrir, los usuarios pueden consultar las correspondientes directrices sobre programación y mantenimiento para garantizar que el robot de soldadura siga funcionando normalmente y satisfaga las necesidades de un mayor número de usuarios.