Hvad er nogle almindelige problemer, der opstår ved brug af svejserobotter?
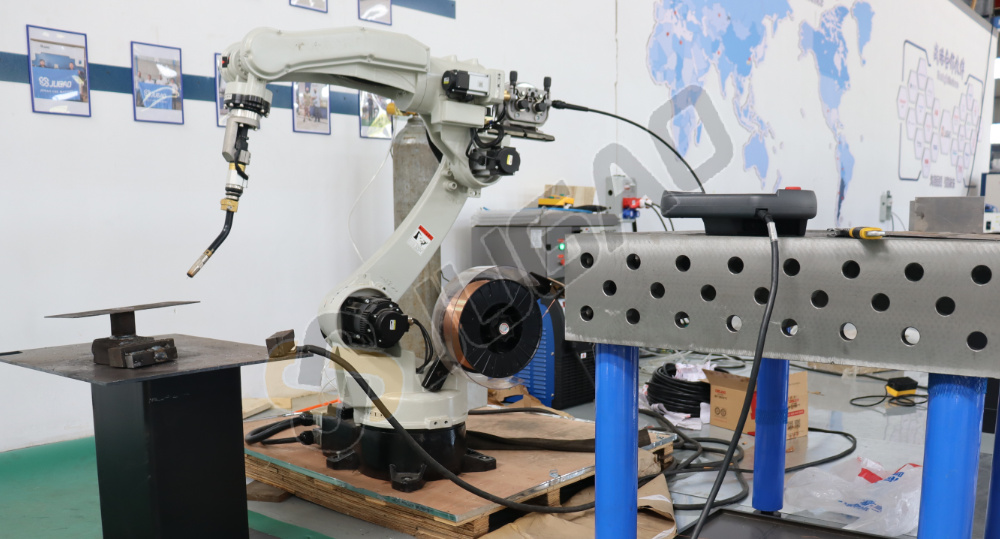
Brugen af svejserobotter kan ikke kun stabilisere og forbedre svejsekvaliteten samt øge produktionseffektiviteten, men også reducere de faglige krav til svejsere, hvilket forkorter forberedelsestiden for produktopgraderinger og reducerer den tilsvarende udstyrsinvestering. Ved brug af robot-svejseudstyr kan der opstå problemer som fx svejsning uden for centrum og underskæring på grund af ukorrekt betjening eller udstyrsbeskadigelse. Så hvordan håndteres disse problemer? For at hjælpe brugere med at håndtere disse problemer, der opstår ved brug af svejserobotter, vil vi i det følgende se nærmere på de konkrete indhold herunder.
Ucentreret svejsning kan skyldes forkert svejseposition eller problemer med svejsetænders søgning. I så fald bør man overveje, om TCP (centrumspunktets position for svejsetænderen) er korrekt, og justere den tilsvarende. Hvis dette sker hyppigt, skal nulpositionen for hver akse på robotten kontrolleres og genkalibreres. Indsænkning kan skyldes ukorrekt valg af svejseparametre, forkert svejsetænderens vinkel eller position, hvilket kan justeres passende. Dårlig gasbeskyttelse, for tyk grundfarve på arbejdsemnet eller utilstrækkelig tørring af beskyttelsesgassen kan også forårsage disse problemer; passende justeringer vil løse problemet. Overmæssig sprøjt kan skyldes ukorrekte svejseparametre for svejserobotten, problemer med gasammensætningen eller for lang udvidelse af svejsetråden.
Justering af maskinens effekt kan ændre svejseparametrene, justering af gasforholdet ved hjælp af gasmåleren og justering af den relative position mellem svejsebrænderen og arbejdsemnet kan hjælpe. For problemet med, at der dannes en lysbuekrater ved svejseenden efter afkøling, kan en funktion til underlagt kraterfyldning tilføjes de programmerbare trin for at udfylde krateret. Kollisioner med brænderen kan skyldes afvigelser i monteringen af arbejdsemnet eller unøjagtig TCP (Torch Control Point) for svejsebrænderen. Kontrol af installationen eller justering af svejsebrænderens TCP kan hjælpe. Fejl i lysbuen og manglende evne til at tænde lysbuen kan skyldes, at svejsetråden ikke rører arbejdsemnet, eller at procesparametrene er for lave. Manuel trådfremføring, justering af afstanden mellem svejsebrænderen og svejsen eller justering af procesparametrene kan hjælpe.
En alarm kan indikere et problem med beskyttelsesgasovervågningssystemet, kølevandet eller beskyttelsesgasforsyningen. Det er afgørende at kontrollere kølevands- eller beskyttelsesgasledningerne. Ved programmering af svejserobotter skal der vælges en rimelig svejsefølge for at minimere svejseforvridning og fastlægge længden af svejsebrænderens bevægelsesbane. Rumlige overgange for svejsebrænderen kræver en kort og jævn bevægelsesbane. For at optimere svejseparametre fremstilles prøvestykker til svejseeksperimenter og procesverifikation. Der anvendes en passende positionerorientering, svejsebrænderens stilling samt svejsebrænderens position i forhold til sømmen. Når arbejdsemnet er fastgjort på positioneren, skal positioneren justeres løbende under programmeringen, hvis svejsesømmen ikke befinder sig i den ideelle position og vinkel, så svejsesømmen gradvist opnår en vandret position i henhold til svejsefølgen.
Samtidigt skal robotens aksepositioner kontinuerligt justeres for at rimeligt fastlægge svejsetænders position, vinkel og trådudvidelseslængde i forhold til sømmen. Når arbejdsemnets position er bestemt, skal svejsetænderens position i forhold til sømmen observeres visuelt af programmereren, hvilket er ret besværligt. Tidsmæssige rengøringsprogrammer for tænderen er afgørende. Efter at have skrevet et svejseprogram af en bestemt længde, skal der straks indtastes et rengøringsprogram for tænderen for at forhindre svejsestøv i at tilstoppe svejsemundstykket og kontaktspidsen, sikre tænderens renhed, forlænge mundstykkets levetid, sikre pålidelig lysbuestart og reducere svejsestøv. Programmering kan generelt ikke gennemføres i ét trin; den kræver kontinuerlig kontrol og justering under robot-svejsning, herunder justering af svejseparametre og svejsetænderens holdning osv., for at oprette et godt program. Personale, der bruger svejserobotter, skal tage forholdsregler for at undgå udstyrsbeskadigelse, nedsat arbejdseffektivitet og andre problemer. Hvis sådanne problemer alligevel opstår, kan brugere henvise til relevante vejledninger for planlægning og vedligeholdelse for at sikre, at svejserobotten kan fortsætte med at fungere normalt og opfylde behovene hos flere brugere.