ปัญหาทั่วไปที่มักพบเมื่อใช้หุ่นยนต์เชื่อมคืออะไร?
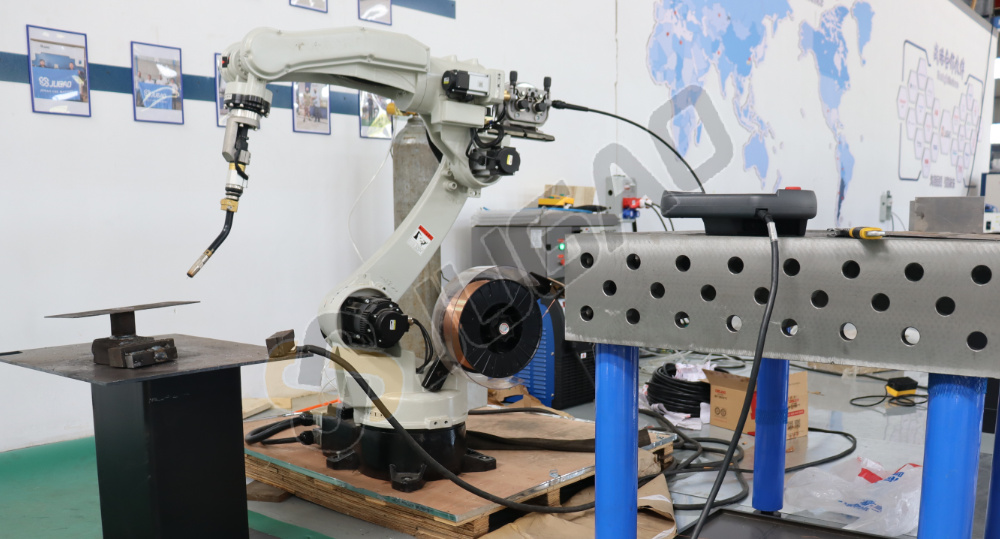
การใช้หุ่นยนต์เชื่อมไม่เพียงแต่ช่วยให้คุณภาพการเชื่อมมีความเสถียรและดีขึ้น รวมทั้งเพิ่มประสิทธิภาพในการผลิตเท่านั้น แต่ยังลดข้อกำหนดด้านทักษะของช่างเชื่อมอีกด้วย ซึ่งส่งผลให้วงจรการเตรียมความพร้อมสำหรับการอัปเกรดผลิตภัณฑ์สั้นลง และลดการลงทุนในอุปกรณ์ที่เกี่ยวข้อง เมื่อใช้อุปกรณ์เชื่อมแบบหุ่นยนต์ อาจเกิดปัญหา เช่น การเชื่อมไม่อยู่กึ่งกลาง (off-center welding) และรอยบากใต้ผิวเชื่อม (undercut) ได้จากปฏิบัติการที่ไม่เหมาะสมหรือความเสียหายของอุปกรณ์ ดังนั้น ควรจัดการกับปัญหาเหล่านี้อย่างไร? เพื่อช่วยให้ผู้ใช้สามารถแก้ไขปัญหาที่พบเจอในการใช้งานหุ่นยนต์เชื่อมได้อย่างมีประสิทธิภาพ ขอเชิญศึกษาเนื้อหาเฉพาะเจาะจงด้านล่างนี้อย่างละเอียด
การเชื่อมที่ไม่อยู่กึ่งกลางอาจเกิดจากตำแหน่งการเชื่อมที่ไม่ถูกต้อง หรือปัญหาในการตรวจจับของหัวเชื่อม ในกรณีนี้ ควรพิจารณาว่าค่า TCP (ตำแหน่งจุดศูนย์กลางของหัวเชื่อม) มีความแม่นยำหรือไม่ และปรับค่าดังกล่าวให้เหมาะสม หากปัญหานี้เกิดขึ้นบ่อยครั้ง ควรตรวจสอบตำแหน่งศูนย์ (zero position) ของแต่ละแกนของหุ่นยนต์ และทำการปรับเทียบใหม่ การเกิดร่องลึกตามแนวรอยเชื่อม (undercut) อาจเกิดจากการเลือกพารามิเตอร์การเชื่อมที่ไม่เหมาะสม มุมหรือตำแหน่งของหัวเชื่อมที่ไม่ถูกต้อง ซึ่งสามารถปรับให้เหมาะสมได้ การป้องกันด้วยก๊าซที่ไม่เพียงพอ ไพรเมอร์บนชิ้นงานที่หนาเกินไป หรือก๊าซป้องกันที่ไม่แห้งสนิท ก็อาจเป็นสาเหตุของปัญหาเหล่านี้เช่นกัน ดังนั้นการปรับแต่งที่เหมาะสมจะช่วยแก้ไขปัญหาได้ รอยกระเด็นมากเกินไปอาจเกิดจากพารามิเตอร์การเชื่อมของหุ่นยนต์เชื่อมที่ไม่เหมาะสม ปัญหาองค์ประกอบของก๊าซ หรือความยาวส่วนปลายของลวดเชื่อมที่ยื่นออกมาไกลเกินไป
การปรับกำลังเครื่องจักรสามารถเปลี่ยนแปลงพารามิเตอร์การเชื่อมได้ การปรับอัตราส่วนก๊าซโดยใช้มิเตอร์วัดก๊าซ และการปรับตำแหน่งสัมพัทธ์ของหัวเชื่อมกับชิ้นงานสามารถช่วยแก้ปัญหาได้ สำหรับปัญหาหลุมอาร์ค (arc crater) ที่เกิดขึ้นที่ปลายรอยเชื่อมหลังจากการเย็นตัว สามารถเพิ่มฟังก์ชันการฝังหลุมอาร์ค (submerged arc crater) ลงในขั้นตอนการเขียนโปรแกรมเพื่อเติมหลุมดังกล่าวได้ การชนของหัวเชื่อมอาจเกิดจากความคลาดเคลื่อนในการประกอบชิ้นงาน หรือจุดควบคุมหัวเชื่อม (TCP: Torch Control Point) ไม่แม่นยำ การตรวจสอบการติดตั้งหรือการปรับค่า TCP ของหัวเชื่อมสามารถช่วยแก้ไขปัญหาได้ ข้อบกพร่องของอาร์คและการไม่สามารถจุดอาร์คได้อาจเกิดจากลวดเชื่อมไม่สัมผัสกับชิ้นงาน หรือพารามิเตอร์กระบวนการต่ำเกินไป การป้อนลวดเชื่อมด้วยตนเอง การปรับระยะห่างระหว่างหัวเชื่อมกับรอยเชื่อม หรือการปรับพารามิเตอร์กระบวนการสามารถช่วยแก้ไขปัญหาได้
สัญญาณเตือนอาจบ่งชี้ถึงปัญหาที่เกิดขึ้นกับระบบตรวจสอบก๊าซป้องกัน น้ำหล่อเย็น หรือแหล่งจ่ายก๊าซป้องกัน การตรวจสอบท่อน้ำหล่อเย็นหรือท่อก๊าซป้องกันจึงมีความสำคัญอย่างยิ่ง วิธีการเขียนโปรแกรมหุ่นยนต์เชื่อมควรเลือกลำดับการเชื่อมที่เหมาะสมเพื่อลดการบิดงอจากการเชื่อม และกำหนดความยาวของเส้นทางการเคลื่อนที่ของหัวเชื่อม สำหรับการเปลี่ยนผ่านในแนวปริภูมิของหัวเชื่อม จำเป็นต้องใช้เส้นทางการเคลื่อนที่ที่สั้นและเรียบเนียน เพื่อปรับแต่งพารามิเตอร์การเชื่อมให้มีประสิทธิภาพสูงสุด จะมีการผลิตชิ้นงานทดสอบเพื่อดำเนินการทดลองการเชื่อมและการตรวจสอบกระบวนการ รวมทั้งใช้การจัดวางตำแหน่งของอุปกรณ์ปรับมุม (positioner) ท่าทางของหัวเชื่อม และตำแหน่งของหัวเชื่อมเทียบกับรอยต่ออย่างเหมาะสม หลังจากยึดชิ้นงานไว้บน positioner แล้ว หากแนวรอยเชื่อมไม่อยู่ในตำแหน่งและมุมที่เหมาะสม จำเป็นต้องปรับค่า positioner อย่างต่อเนื่องระหว่างขั้นตอนการเขียนโปรแกรม เพื่อให้แนวยึดรอยเชื่อมค่อยๆ เคลื่อนเข้าสู่ตำแหน่งแนวนอนตามลำดับการเชื่อม
ในขณะเดียวกัน ตำแหน่งแกนของหุ่นยนต์จะต้องได้รับการปรับอย่างต่อเนื่อง เพื่อกำหนดตำแหน่ง องศา และความยาวส่วนปลายลวดเชื่อมของหัวเชื่อมให้อยู่ในระดับที่เหมาะสมเมื่อเทียบกับแนวรอยต่อ หลังจากกำหนดตำแหน่งชิ้นงานแล้ว โปรแกรมเมอร์จำเป็นต้องสังเกตตำแหน่งหัวเชื่อมเมื่อเทียบกับแนวรอยต่อด้วยสายตา ซึ่งเป็นเรื่องที่ค่อนข้างยาก โปรแกรมการทำความสะอาดหัวเชื่อมอย่างทันท่วงทีจึงมีความสำคัญอย่างยิ่ง หลังจากเขียนโปรแกรมการเชื่อมที่มีความยาวหนึ่งระดับแล้ว ควรป้อนโปรแกรมการทำความสะอาดหัวเชื่อมทันที เพื่อป้องกันไม่ให้เศษโลหะที่กระเด็นออกมาจากการเชื่อมไปอุดตันที่หัวฉีดและปลายติดต่อของหัวเชื่อม ซึ่งจะช่วยรักษาความสะอาดของหัวเชื่อม เพิ่มอายุการใช้งานของหัวฉีด ประกันความน่าเชื่อถือของการจุดอาร์ค และลดเศษโลหะที่กระเด็นออกมาจากการเชื่อม การเขียนโปรแกรมโดยทั่วไปไม่สามารถทำเสร็จสมบูรณ์ได้ในครั้งเดียว แต่จำเป็นต้องมีการตรวจสอบและปรับปรุงอย่างต่อเนื่องระหว่างการเชื่อมด้วยหุ่นยนต์ โดยปรับพารามิเตอร์การเชื่อมและท่าทางของหัวเชื่อม เป็นต้น เพื่อสร้างโปรแกรมที่มีประสิทธิภาพสูง บุคลากรที่ใช้งานหุ่นยนต์เชื่อมควรระมัดระวังเพื่อหลีกเลี่ยงความเสียหายต่ออุปกรณ์ ประสิทธิภาพการทำงานที่ลดลง หรือปัญหาอื่น ๆ ที่อาจเกิดขึ้น หากเกิดปัญหาดังกล่าว ผู้ใช้งานสามารถอ้างอิงแนวทางที่เกี่ยวข้องสำหรับการวางแผนและการบำรุงรักษา เพื่อให้มั่นใจว่าหุ่นยนต์เชื่อมจะสามารถดำเนินการต่อไปได้อย่างปกติ และตอบสนองความต้องการของผู้ใช้งานเพิ่มเติมได้