















































ปัญหาทั่วไปในกระบวนการเชื่อมด้วยหุ่นยนต์
ผลลัพธ์ของการเชื่อมด้วยหุ่นยนต์ได้รับผลกระทบจากปัจจัยหลายประการ ลูกค้าจำนวนมากประสบปัญหาต่างๆ ก่อนที่จะใช้งานหุ่นยนต์เชื่อมได้อย่างคล่องแคล่ว ปัญหาเหล่านี้มักเกิดจากการปฏิบัติงานที่ไม่เหมาะสมหรือการตั้งค่าหุ่นยนต์ที่ไม่สอดคล้องกัน และสามารถแก้ไขได้ด้วยการปรับแต่งที่เหมาะสม ด้านล่างนี้ เราจะทบทวนปัญหาทั่วไปที่พบในการใช้งานหุ่นยนต์เชื่อม พร้อมทั้งวิธีการแก้ไข
ข้อที่หนึ่ง: การจุดอาร์คไม่สำเร็จระหว่างการเชื่อม
1. ยังไม่สามารถจุดอาร์คได้

สาเหตุ: โปรแกรมไม่มีคำสั่งจุดอาร์คที่สอดคล้องกันก่อนที่จะดำเนินการคำสั่งหยุดอาร์ค
วิธีแก้ไข: ตรวจสอบว่ามีการเพิ่มคำสั่งยุติอาร์ค (arc termination command) หรือคำสั่งเริ่มต้นอาร์ค (arc initiation command) ซ้ำหรือไม่
2. การเริ่มต้นอาร์คล้มเหลว ข้อผิดพลาดในการตรวจจับสัญญาณ

วิธีการแก้ไข:
1) ตรวจสอบการตั้งค่าเวลาการหยุดการเชื่อมบนหน้าพารามิเตอร์ โดยทั่วไปแล้ว การตั้งค่าเวลาที่เหมาะสมคือ 5000 มิลลิวินาที
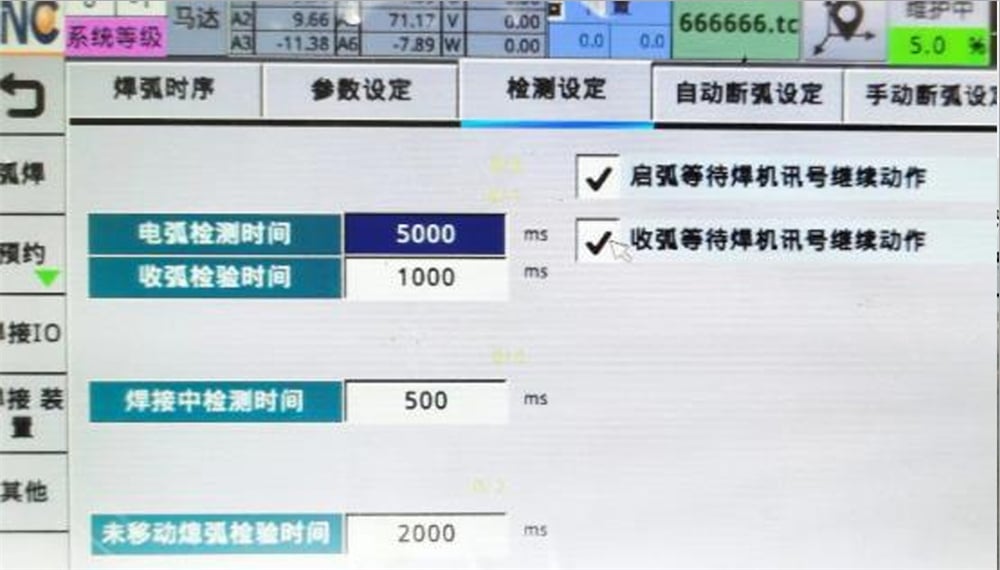
2) ตรวจสอบว่าสัญญาณจากเครื่องเชื่อมถูกส่งไปยังระบบได้สำเร็จหรือไม่
3) ตรวจสอบว่าชิ้นงานมีการต่อกราวด์อย่างถูกต้องหรือไม่
3. เกิดอาร์คและลวดเชื่อมขาด
สาเหตุ:
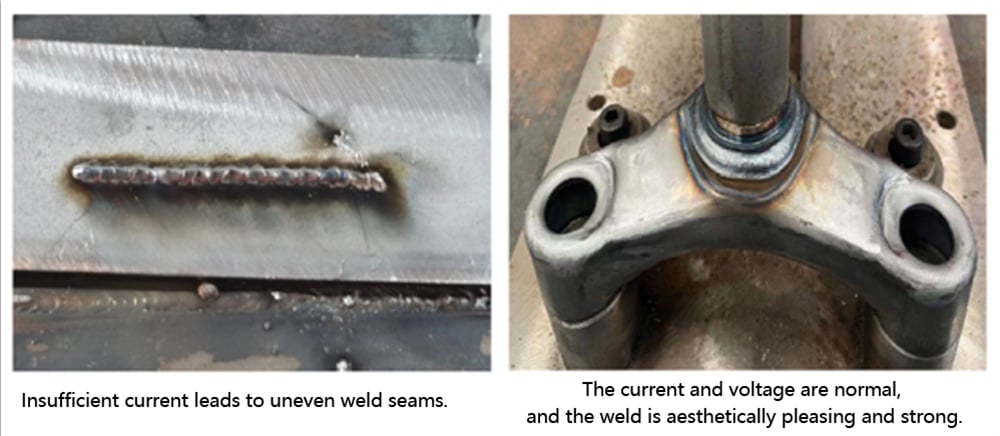
1) กระแสไฟฟ้าและแรงดันไฟฟ้าไม่สอดคล้องกัน
วิธีแก้ไข: เราจำเป็นต้องตั้งค่ากระแสไฟฟ้าและแรงดันไฟฟ้าให้เหมาะสมตามความหนาจริงของชิ้นงานและเครื่องเชื่อม
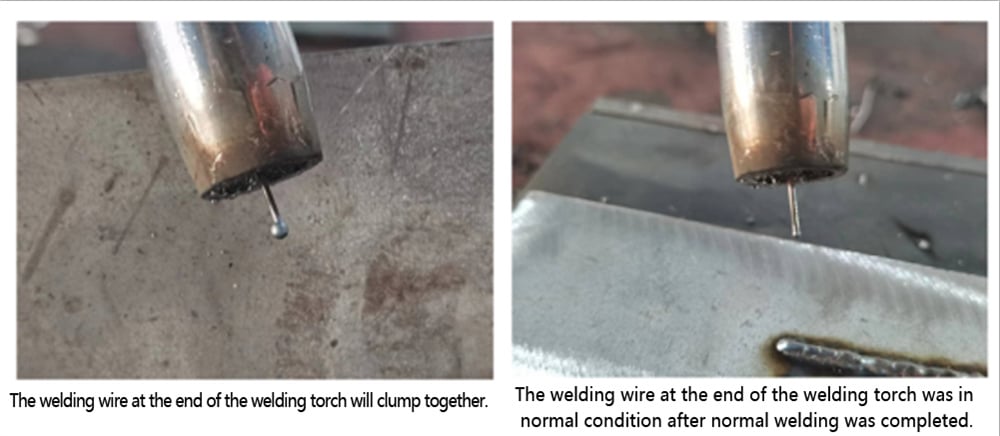
2) ความยาวของลวดเชื่อมยาวเกินไป
วิธีแก้ไข: โดยทั่วไป ความยาวของการยื่นออกของลวดเชื่อมควรอยู่ระหว่าง 10 ถึง 15 เท่าของเส้นผ่านศูนย์กลางลวดเชื่อม โปรดเลือกความยาวลวดเชื่อมที่เหมาะสมตามเส้นผ่านศูนย์กลางของลวดเชื่อม
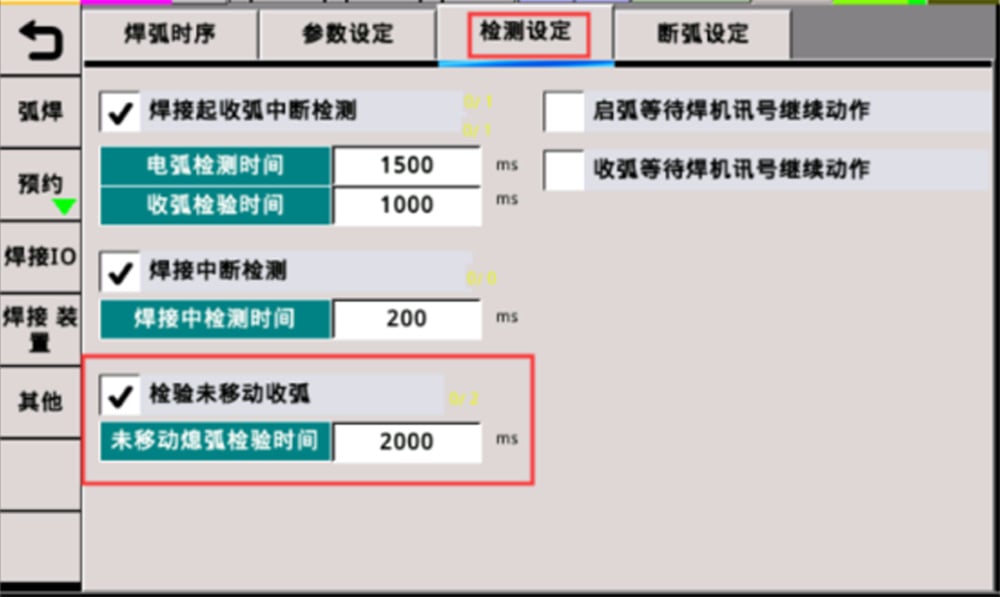
4. การดับอาร์คโดยอัตโนมัติเกิดขึ้นหลังจากจุดติดอาร์ค

การแก้ไขปัญหา: ตรวจสอบว่ามีปัญหากับการตั้งค่าพารามิเตอร์เวลาหรือไม่ และตรวจสอบว่าหัวเชื่อมได้เคลื่อนที่หรือไม่
II. เกิดการหยุดการลุกไหม้ของอาร์คระหว่างการเชื่อม
สาเหตุ:
1. ลวดเชื่อมไม่สัมผัสชิ้นงาน ทำให้เกิดสัญญาณเตือนการหยุดการลุกไหม้ของอาร์ค
วิธีแก้ไข: ปรับตำแหน่งของลวดเชื่อมและชิ้นงานใหม่เพื่อให้มั่นใจว่าจะมีการสัมผัสอย่างสมบูรณ์ระหว่างการเชื่อม (อย่างไรก็ตาม ลวดเชื่อมไม่ควรอยู่ใกล้ชิ้นงานมากเกินไป เพราะอาจทำให้ชิ้นงานทะลุได้)
2. เส้นทางการเชื่อมที่ไม่เหมาะสมทำให้หัวเชื่อมชนเข้ากับชิ้นงานและยกตัวขึ้นโดยอัตโนมัติ
วิธีแก้ไข: ตั้งค่าเส้นทางการเชื่อมใหม่
3. การสัมผัสที่ไม่ดีระหว่างขั้วบวกและขั้วลบที่เครื่องเชื่อม
วิธีแก้ไข: ตรวจสอบการเดินสายของขั้วบวกและขั้วลบ
III. สาเหตุของการไม่สามารถดับอาร์คได้หลังการเชื่อมเสร็จสิ้น
1. การสิ้นสุดการเชื่อมด้วยอาร์กไม่สำเร็จ เนื่องจากข้อผิดพลาดในการตรวจจับสัญญาณ
สาเหตุ: เครื่องเชื่อมไม่ได้รับสัญญาณจากระบบหุ่นยนต์ ทำให้ระบบหุ่นยนต์ไม่สามารถสิ้นสุดการเชื่อมด้วยอาร์กได้
การแก้ไขปัญหา:
(1) ตรวจสอบว่าพารามิเตอร์การตั้งค่ามีความเหมาะสมหรือไม่
(2) ตรวจสอบสัญญาณ I/O และตรวจสอบว่าสัญญาณจุด I สำหรับการสิ้นสุดการเชื่อมด้วยอาร์กผิดปกติหรือไม่ หากสัญญาณจุด I แสดงสถานะเปิด (ON) อยู่ตลอดเวลา...
(3) ตรวจสอบว่ามีการลัดวงจรในวงจรหรือไม่ และสายกราวด์เชื่อมต่อผิดปกติหรือไม่
2. ไม่มีการตั้งคำสั่งสิ้นสุดการเชื่อมด้วยอาร์กหลังจากเริ่มการเชื่อมด้วยอาร์ก

สาเหตุ: เมื่อเกิดแจ้งเตือนนี้บนแผงควบคุมแบบสอน (teach pendant) ให้ตรวจสอบว่าลืมใส่คำสั่งสิ้นสุดการเชื่อมด้วยอาร์กหรือไม่
วิธีแก้ไข: เพิ่มคำสั่งสิ้นสุดการเชื่อมด้วยอาร์กหลังจากคำสั่งเริ่มการเชื่อมด้วยอาร์กในโปรแกรม
บทความนี้กล่าวถึงปัญหาที่เกี่ยวข้องกับการเริ่มต้นการเชื่อมด้วยอาร์ก การสิ้นสุดการเชื่อมด้วยอาร์ก และการหยุดชะงักของการเชื่อมด้วยอาร์กระหว่างกระบวนการเชื่อมของหุ่นยนต์เชื่อม โดยผู้ใช้สามารถอ้างอิงวิธีแก้ไขที่ระบุไว้หากพบปัญหาดังกล่าว หากไม่สามารถแก้ไขปัญหาได้ โปรดติดต่อเจ้าหน้าที่เทคนิคของบริษัท JUGAO
หุ่นยนต์เชื่อมคือหุ่นยนต์อัตโนมัติที่ผสานฟังก์ชันการเชื่อมหลายแบบไว้ด้วยกัน เช่น การเชื่อมแบบป้องกันด้วยก๊าซ การเชื่อมอาร์กอน การตัดพลาสม่า และการเชื่อมด้วยเลเซอร์ หุ่นยนต์ชนิดนี้มีความยืดหยุ่นสูง สามารถปรับตัวได้ดี มีประสิทธิภาพในการเชื่อมสูง และให้คุณภาพการเชื่อมที่เสถียร จึงสามารถนำไปใช้งานได้อย่างกว้างขวางในหลากหลายสาขา เช่น การผลิตเครื่องจักร อุตสาหกรรมยานยนต์ การผลิตอุปกรณ์อิเล็กทรอนิกส์ความแม่นยำ และการเหมืองถ่านหิน

