















































Izračun zaporedja lomljenja ESA S530: Načela, obratovanje in navodila za uporabo
Vsebina
• Uvod
• Samodejno izračunavanje zaporedja gibanja (izbirna funkcija)
◦ Vmesnik za izračun
◦ Rezultati optimizacije
◦ Funkcija simulacije
◦ Nastavitev ležajev/podpor
• Ročno izračunavanje zaporedja gibanja (izbirna funkcija)
◦ Rezultati procesa optimizacije
◦ Delovanje simulacije
◦ Konfiguracija ležaja/podpore
◦ Sprememba zaporedja upogibanja
• Koraki za postopek upogibanja škatle
• Pogosta vprašanja (Pogosta vprašanja)
◦ Kako izboljša ESA S530 proces upogibanja?
◦ Lahko ročno spremениm zaporedje upogibanja v napravi ESA S530?
◦ Kaj naj storim, če pride do napake med izračunom zaporedja upogibanja na napravi ESA S530?
• Zaključek
Uvod
Na področju obdelave kovin je natančno upogibanje ključni dejavnik pri zagotavljanju kakovosti izdelka, funkcija izračuna zaporedja upogibanja ESA S530 pa je pravzaprav ključna tehnologija za doseganje tega cilja. Kot osnovna značilnost sistema ESA S530 ta funkcija pametno optimizira vrstni red upogibanja kovinskih plošč, zmanjšuje operativne napake in odpad materiala ter hkrati zagotavlja, da izdelki v celoti ustrezajo konstrukcijskim specifikacijam. Ne glede na to, ali gre za izboljšanje proizvodne učinkovitosti ali ohranjanje stabilne kakovosti obdelave, ima ta funkcija neprecenljivo vlogo. V tem članku bomo podrobno analizirali delovno logiko, osnovne prednosti in praktične metode uporabe funkcije izračuna zaporedja upogibanja ESA S530 ter tako ponudili uporabne smernice za lažji uvod za začetnike in optimizacijo procesov za izkušene operaterje, kar pomaga izboljšati splošno raven kovinske obdelave.
Samodejni izračun zaporedja upogibanja (izbirna funkcija)
Pot za sprožitev avtomatskega izračuna zaporedja upogibanja je preprosta: zaženite postopek iz vmesnika risbe obdelovanca in pritisnite tipko [Izračunaj], da vstopite v operativni vmesnik. Ta način omogoča neodvisno optimizacijo zaporedja upogibanja s pomočjo numerične kontrole, hkrati pa ohranja možnost usklajevanja z ročnim načinom, da se prilagodi potrebam različnih proizvodnih scenarijev.
Vmesnik za izračun
Računski vmesnik je »načrtovalno središče« pred upogibanjem. Ne prikazuje le stanja pred simulacijo upogibanja izdelka v realnem času, temveč tudi jasno prikazuje položajni odnos med jedrnimi komponentami upogibnega stroja – žig, kalibr in ustav, ter tako pomaga obratovalcem vnaprej razumeti relativni položaj opreme in izdelka. Na desni strani vmesnika so trije podokni, ki dinamično prikazujejo kot vrtenja in število prevračanj izdelka. Hkrati je opremljen z možnostjo »pridobivanja popolne rešitve«, ki lahko pregleda vse potencialne poti upogibanja in zagotovi popolno podporno podatkovno osnovo za nadaljnjo optimizacijo.
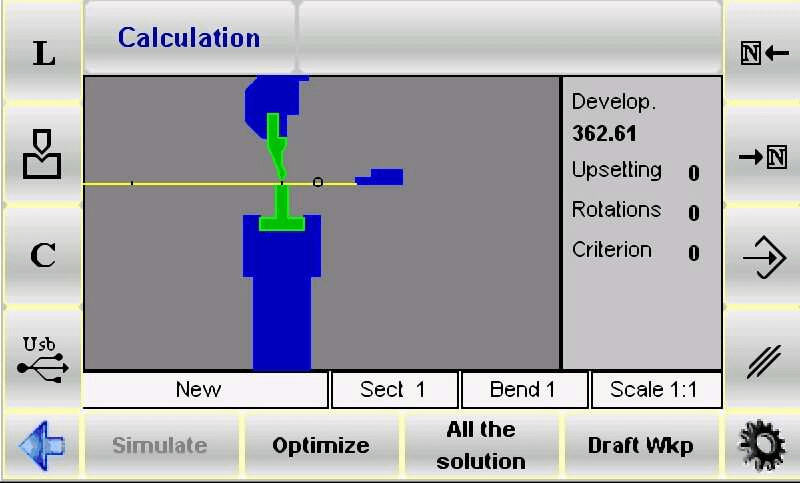
Poleg tega sistem zagotavlja varnost in učinkovitost obdelave s pomočjo numerične krmilne logike: vedno ohranja večji del kovinske plošče v nadzornem območju operaterja, da zmanjša obratovalna tveganja. Operaterji lahko prilagodijo računske standarde glede na proizvodne potrebe ter prosto preklapljajo med avtomatskim/ročnim načinom, da dodatno izboljšajo prilagodljivost procesa.
Logika usklajevanja med avtomatskim in ročnim načinom
Izračun zaporedja upogibanja pri napravi ESA S530 ne teče v enojnem načinu, temveč doseže fleksibilno obdelavo prek usklajevanja dveh načinov »avtomatski + ročni«:
• Samodejni način: S pomočjo algoritmov številčnega nadzora sistem samodejno izvede izračun najbolj ustreznega zaporedja upogibanja brez posega uporabnika. Po pritisku na gumb [Optimiziraj] sistem samodejno izbere shemo z najvišjo učinkovitostjo in najmanjšo napako glede na parametre obdelovanca (kot so material, debelina, kot upogiba).
• Ročni način: Uporabniki lahko samostojno določijo del ali vse korake upogibanja ter jih finoma nastavijo s pomočjo posebnih funkcionalnih tipk: tipka [Upogni] zaklene izbrano dejanje upogibanja, tipka [Zavrti] pa omogoča nadzor kota vrtenja obdelovanca; po dokončanju ročnih nastavitev pritisnite gumb [Optimiziraj], sistem pa bo ročno določene parametre vključil v avtomatski izračun, da ustvari shemo, ki upošteva tako »operativno namero« kot tudi »optimizacijo procesa«.
Rezultati optimizacije
Logika povratnih informacij o rezultatih optimizacije je jasna, kar omogoča operatorjem hitro ocenjevanje in odločanje:
• Ko shema ni izvedljiva: Sistem prikaže opozorilo »NI REŠITVE«, s čimer opozori operatorja, da preveri morebitne težave (npr. nasprotujoči se koti upogibanja, interferenceskih komponent ipd.) ali poskusi spremeniti vrstni red upogibanja. Če obstaja tveganje trka z delom, bo območje trka intuitivno označeno s spremembo barve (npr. rdeče poudarjeno).
• Dovoljenje posebnih operacij: Če gre za »neuničevalno interferenco« (npr. začasni stik, ki ne vpliva na delo ali opremo), lahko operator izbere, da prezre opozorilo in nadaljuje z izvajanjem postopka upogibanja.
• Ko shema je izvedljiva: Sistem prikaže »REŠITEV NAJDENA« ter ponudi štiri osnovne možnosti operacij:
a. [Ustavi]: Zaustavite proces optimizacije, da omogočite fino nastavitev parametrov trenutnega shema (na primer prilagoditev kota upogibanja, spreminjanje položaja nosilca).
b. [Nadaljuj]: Neprestano iskanje drugih možnih rešitev, dokler ne preostane nobena izvedljiva pot. Če so bile preverjene vse možnosti in ni primernega shema, se na koncu prikaže »NI REŠITVE«.
c. [Simuliraj]: Začnite simulacijo zaporedja upogibanja. Operatorji lahko postopek napredujejo s tipko [Nadaljuj] ali simulacijo prekinete s tipko [Ustavi], da v realnem času opazujete proces upogibanja.
d. [Sprejmi]: Shranite trenutno izračunane parametre upogibanja (kot, hitrost, položaj nosilca) v program za neposredno uporabo pri dejanskem obdelovanju.
Funkcija simulacije
Funkcija simulacije je »predogledna povezava«, ki zagotavlja natančnost upogibanja, operativni koraki pa so intuitivni in nadzorovani:
1. Pritisnite tipko [Simulacija], in vmesnik prikaže stanje ploščatega izdelka, ki ga je treba upogniti, ter razčisti začetni položaj prvega upogibanja.
2. Izberite primerno nosilno konstrukcijo s pomočjo tipke [Nosilec/Podpora]. Treba je zagotoviti, da na mestu podpore ni nevarnosti trka in da to ustreza omejitvam gibanja osi opreme (na primer hod X-osi in R-osi).
3. Pritisnite tipko [Nadaljuj], sistem izvede prvo dejanje upogibanja in prikaže obliko izdelka po upogibanju; za nadaljnje upogibanje je treba ta korak ponoviti, da se postopek postopoma napreduje.
4. Če morate zaustaviti postopek za opazovanje podrobnosti, lahko pritisnete tipko [Stop]; če potrebujete nazaj in prilagoditev (na primer popravek položaja podpore prejšnjega koraka), se lahko s tipko [Prejšnji] vrnite na prejšnji korak.
5. Ponavljajte pritiskanje tipke [Nadaljuj], dokler ni simulacija vseh korakov upogibanja končana. V tem trenutku se bo znova prikazala tipka [Simuliraj], kar nakazuje konec procesa simulacije.
Nastavitev ležaja/podpore
Nastavitev ležaja/podpore je ključna za preprečevanje deformacije obdelovanca in zagotavljanje stabilnosti upogibanja. Postopek mora slediti naslednjemu postopku:
1. Pritisnite tipko [Simuliraj], pri čemer vmesnik prikaže raven obdelovanec, ki ga je potrebno prvič upogniti, s čimer se pojasni začetno stanje obdelave.
2. Pritisnite tipko [Ležaj/ Podpora], da preklopite vrsto podpore – izberete lahko »Prva podpora«, »Druga podpora« ali »Podpora obdelovanca«. Sistem samodejno presodi izvedljivost premika lokatorja: lokator se premakne na ciljno pozicijo podpore le, kadar ni nevarnosti trka in so izpolnjeni pogoji omejitve opreme.
3. Pritisnite tipko [Nadaljuj], da si ogledate stanje polizdelka po prvem upogibanju, in potrdite, ali učinek podpore ustreza pričakovanjem.
4. Nadaljujte s pritiskom na tipko [Nadaljuj], da vnesete nastavitve za drugo upogibanje, in izberite vrsto podpore glede na potrebo (gibanje locirnika mora še vedno izpolnjevati dvojne pogoje »brez trčenja + skladno z omejitvami«).
5. Med postopkom lahko kadarkoli pritisnete tipko [Ustavi], da ustavite simulacijo, ali pa pritisnete tipko [Prejšnji], da se vrnemo na prejšnji korak in prilagodite parametre podpore.
6. Nadaljujte s simulacijo, dokler se znova ne prikaže tipka [Simuliraj], kar pomeni, da je celotna preverjanja nastavitve podpore zaključena.
Treba je opozoriti, da se ta funkcija nahaja v zgornjem desnem kotu programskega vmesnika za numerično krmiljenje, tik ob ikoni vrste upogibanja. Sistem samodejno popravi odstopanje položaja osi X in osi R; če je trenutni program »grafične vrste«, ključ [Nosilec/Podpora] ni na voljo v načinu numeričnega krmiljenja, prilagajanje podpore pa je treba izvesti s preklopom na simulacijski vmesnik.
Ročni izračun zaporedja upogibanja (izbirna funkcija)
Ročni izračun zaporedja upogibanja je primeren za scenarije, ki zahtevajo personalizirane prilagoditve. Začetna pot je enaka kot pri samodejnem načinu: pritisnite gumb [Izračunaj] iz vmesnika risbe obdelovanca, da vstopite. Vmesnik bo podrobno simuliral celoten proces upogibanja, vključno z vizualnim prikazom zgornjega in spodnjega dela upogibnega stroja, orodja, matrike, lokatorja in obdelovanca pred upogibanjem; tri plošče na desni strani bodo dinamično prikazovale število obratov in kote prevračanja obdelovanca med postopkom izračuna (za določene diagrame glejte opis vmesnika v poglavju »Samodejni izračun zaporedja upogibanja«).
Ročno iskanje zaporedja upogibanja
Jedro ročnega načina iskanja je »ročno vodenje poti upogibanja«, operacijski koraki pa so naslednji:
1. Uporabite puščične tipke


za brskanje po vseh korakih upogibanja in iskanje ciljne ravni, ki jo je treba prilagoditi.
2. Pritisnite tipko [Bend], da zaklenete upogibanje na želeni ravni; če želite ukrep preklicati, znova pritisnite tipko [Bend].
3. Pritisnite tipko [Turn], da prilagodite kot vrtenja obdelovanca, kar zagotovi, da bo naslednje upogibanje usklajeno z položajem trenutnega koraka.
4. Ko končate vsa prisilna nastavljanja upogibov, pritisnite tipko [Optimize]. Sistem izračuna končni postopek na podlagi ročno določenega zaporedja in v kombinaciji s procesnimi omejitvami (npr. brez trčenj, omejitev hoje osi).
Rezultati postopka optimizacije
Povratna informacija o rezultatih optimizacije v ročnem načinu je enaka kot v avtomatskem načinu, vendar se osredotoča na »prilagodljivost ročne nastavitve«.
• Če konfiguracija obdelovanca (na primer ročno določeno zaporedje upogibanja) ni mogoče obdelati, sistem prikaže opozorilo »Prisiljena rešitev«. Uporabnik mora s pomočjo funkcije ročnega iskanja ponovno postaviti težavne korake (na primer spor med koti upogibanja, neustrezna položaja podpor).
• Potencialna tveganja trkov mehanskih komponent bodo označena z barvnimi spremembami (na primer oranžno opozorilo), da pomagajo uporabniku prilagoditi zaporedje ali spremeniti podpore.
• Če trk ne ogroža poškodb (na primer začasni stik med robom obdelovanca in orodjem), je mogoče izvesti upogibanje; če sistem najde izvedljiv načrt, prikaže »Rešitev najdena«, uporabnik pa lahko izbere [Ustavi], da začasno prekine optimizacijo za prilagoditev, ali [Sprejmi], da vključi izračunane vrednosti v program.
Simulacijski obrat
Postopek simulacije ročnega načina je enak kot pri avtomatskem načinu. Osnovna razlika je v tem, da »je simulacija temelji na ročno določenem zaporedju«:
1. Pritisnite tipko [Simulacija], da si ogledate stanje ploščatega izdelka pred upogibanjem (začetno stanje ustreza prvemu ročno nastavljenemu kompletu upogibov).
2. Pritisnite tipko [Nosilec/Podpora], da izberete vrsto podpore, s čimer zagotovite, da ne pride do trka in da gibanje osi ostane znotraj dovoljenih mej.
3. Pritisnite tipko [Nadaljuj], da izvedete prvi upogib, in ponovite ta korak za nadaljnja upogibanja; lahko pritisnete [Ustavi], da zaustavite, ali [Prejšnji], da se vrnemo nazaj in preverimo smiselnost ročno določenega zaporedja.
4. Nadaljujte z simulacijo, dokler se znova ne prikaže tipka [Simulacija]. Ko potrdite, da celoten proces upogibanja poteka brez težav, jo lahko uporabite za dejansko obdelavo.
Konfiguracija nosilca/podpore
Konfiguracija ležaja/podpore v ročnem načinu ima enake korake delovanja kot v avtomatskem načinu, vendar je treba upoštevati, da »podpora mora biti prilagojena ročno določenemu zaporedju gibanja«:
• Gibanje pozicionirnika mora izpolnjevati dvojne pogoje »ročno nastavljeno mesto gibanja« in »brez trka«, da se prepreči odpoved podpore zaradi prilagoditve zaporedja.
• Če je potrebno spremeniti vrsto podpore, se to mora izvesti v simulacijskem vmesniku (funkcija [Ležaj/Podpora] ni podprta za grafične programe v numeričnem krmilnem načinu), da se zagotovi ujemanje med podporo in koraki gibanja.
Sprememba zaporedja gibanja
Tudi po optimizaciji zaporedja gibanja ESA S530 še vedno omogoča fleksibilne prilagoditve za izpolnjevanje zahtev za začasne spremembe procesa:
1. Uporabite puščične tipke za brskanje po vseh korakih gibanja in poiščite ciljni gib, ki ga je treba spremeniti.
2. Pritisnite tipko [Ukrivljanje], da prekličete dejanje ukrivljanja, in ponovno izberite novo zaporedje ukrivljanja (ali prilagodite kot vrtenja).
3. Po dokončanju sprememb lahko znova zaženete simulacijo, da preverite izvedljivost novega zaporedja in zagotovite, da je prilagojen postopek natančen in učinkovit.
Koraki za operacijo ukrivljanja škatle
Ukrivljanje škatle je tipični primer v obdelavi kovin. Izračun zaporedja ukrivljanja pri ESA S530 v tem postopku mora slediti logiki »ločeno izvajanje programa« – saj numerično krmiljeni postopek ne more neposredno razviti upognjene škatle v ravno ploščo, mora operator ustvariti dva neodvisna programa za ukrivljanje:
• Program 1: Uporabljen za vodoravno ukrivljanje, določa stranski kot in položaj ukrivljanja stranic škatle.
• Program 2: Uporabljen za navpično ukrivljanje, določa vzdolžne parametre ukrivljanja zgornje/spodnje strani škatle.
Z izvajanjem teh dveh programov zaporedoma je mogoče doseči natančno oblikovanje škatle. Poleg tega bo med izvajanjem večodsečnih programov ESA S530 samodejno dajal prednost obdelavi odseka z ožjo širino kovinske plošče, s čimer se zmanjša tveganje deformacije pločevine in izboljša učinkovitost upogibanja.
Dodajanje odseka
Če želite dodati nov obdelovalni odsek za upogibanje škatle, sledite spodnjim korakom:
1. Pritisnite določeno funkcionalno tipko (za ikono glejte dodatek plošče za upravljanje opreme), da odprete meni za upravljanje odsekov.

2. Izberite možnost »Spremeni odsek« v meniju. Sistem bo samodejno ustvaril nov odsek in operater lahko nastavi parametre upogibanja (kot, položaj nosilca) tega odseka.
Preklic odseka
Če želite izbrisati nepotreben odsek, postopajte na naslednji način:
1. Z uporabo puščičnih tipk pojdite na ciljni odsek in potrdite številko odseka ter parametre.
2. Odprite meni upravljanja odsekov in izberite možnost »Prekliči odsek«.
3. Sistem bo odstranil odsek, program pa se samodejno vrne na korak »Ukrivljenost 1 odseka 1«, da zagotovi neprekinjenost nadaljnjega procesa.
Pogosta vprašanja (FAQ)
Kako ESA S530 izboljša postopek krivljenja?
ESA S530 rekonstruira postopek krivljenja prek »samodejnega izračuna zaporedja krivljenja«: odpravi potrebo po ročnem večkratnem poskušanju in napak (na primer večkratno prilagajanje zaporedja krivljenja pri tradicionalnih postopkih), znatno skrajša čas za vzdrževanje opreme; hkrati sistem optimizira pot na podlagi numeričnih krmilnih algoritmov, zmanjša operativne napake, izboljša splošno učinkovitost in natančnost operacij oblikovanja kovin ter zmanjša stopnjo odpadkov materiala.
Ali lahko ročno spremeni zaporedje krivljenja v ESA S530?
Da. ESA S530 podpira ročno prilagoditev zaporedja upogibanja. Glede na specifične proizvodne potrebe (na primer omejitve oblike posebnih delov, začasne procesne omejitve opreme) lahko operaterji s pomočjo tipk [Upogni] in [Zavrti] prilagodijo del ali celoten postopek upogibanja, pri čemer upoštevajo tako »prilagodljivost procesa« kot tudi »natančnost obdelave«.
Kaj naj storim, če pride med izračunom zaporedja upogibanja ESA S530 do napake?
Če pride do napake pri izračunu, priporočamo reševanje težav v skladu z naslednjimi koraki:
1. Najprej preverite vhodne parametre: preverite, ali so osnovne nastavitve, kot so vrsta materiala, debelina pločevine in kot upogiba, natančne (napačni parametri so pogosta vzroka okvar).
2. Če so parametri pravilni, si oglejte uradni priročnik za uporabo ESA S530 in poiščite rešitev za ustrezno kodo napake v poglavju »Odpravljanje težav«.
3. Če težave še vedno ni mogoče odpraviti, se neposredno obrnite na ekipo za tehnično podporo, posredujte posnetek zaslona s sporočilom o napaki in parametre obdelovanca ter pridobite ciljno pomoč.
Zaključek
Obvladovanje načel in operacij izračuna zaporedja upogibanja ESA S530 je temeljni pogoj za doseganje visoke natančnosti in učinkovitosti pri operacijah upogibanja kovin. Temeljna logika tega procesa je: zagotavljanje kakovosti oblikovanja kompleksnih obdelovancev, kot so škatle, s strategijo »obdelave vodoravnega/vertikalnega upogibanja v ločenih programih« in »izvajanja odseka z ožjo širino pločevine najprej«; hkrati koordinacija avtomatskega in ročnega dvojnega načina omogoča sistemu, da se prilagodi tako standardizirani masovni proizvodnji kot tudi osebnim potrebam obdelave.
Za popolno izkoriščanje zmogljivosti upogibnega stroja in zagotovitev gladkega poteka proizvodnega procesa priporočamo, da operaterji strogo sledijo zgoraj navedenim obratovalnim določilom ter v praksi prilagodijo parametre glede na značilnosti izdelka. Za dodatno pomoč (npr. pridobivanje dodatne tehnične dokumentacije, odgovore na specifična vprašanja o postopkih) nas lahko kadarkoli kontaktirate ali obiščete uradno spletno stran, kjer si lahko ogledate celoten podporni material, povezan z upogibanjem, s čimer bomo skupaj še naprej optimizirali proces obdelave kovin.

