















































Rýchla diagnostika a riešenie porúch spôsobených alarmami v sérii ET
Trápite sa problémami s poplachmi na vašom všetko-elektrickom servozohýbači série ET? Prišli ste na správne miesto. Tento článok poskytne podrobný návod, ako rýchlo odstrániť poruchy spôsobené poplachmi v sérii ET a zabezpečiť tak hladký a efektívny prevádzkový chod výroby. Hoci poplachy v sérii ET sú bežné, s vhodným prístupom ich môžete rýchlo vyriešiť a obnoviť optimálny výkon svojho zariadenia. Bez ohľadu na to, či ste v tomto systéme začínajúci, alebo sa len snažíte optimalizovať svoj proces odstraňovania porúch, tento návod vám poskytne kľúčové kroky na účinné riešenie rôznych problémov s poplachmi.
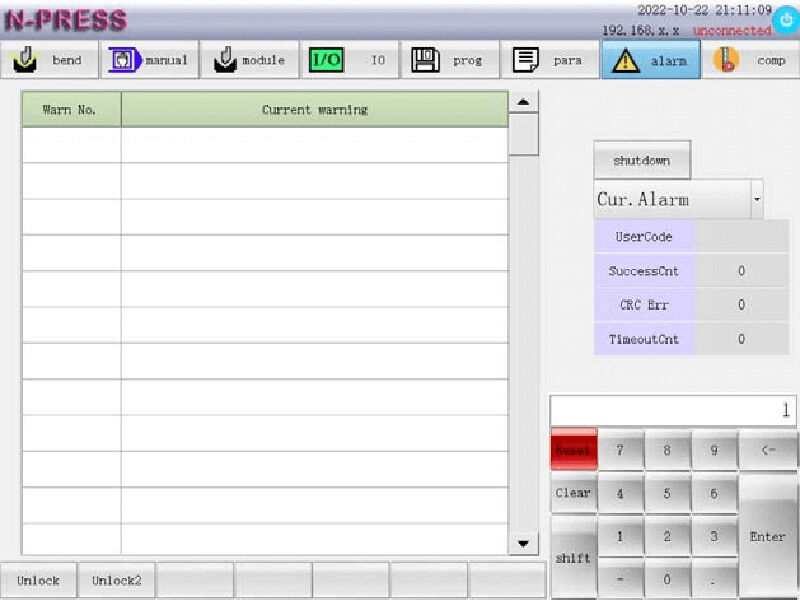
Krok 1: Prístup k rozhraniu poplachov série ET
Kliknite na funkčné tlačidlo „alarm“ a prejdite na rozhranie, kde si môžete pozrieť všetky podrobnosti o alarmoch série ET. Toto rozhranie poskytuje komplexný prehľad aktuálnych alarmov, záznamov o alarmoch a iných dôležitých štatistík, ako sú počet úspešných komunikácií, chyby overenia a časové limity.
Analyzujte záznamy o alarmoch
Zistite frekvenciu a typ vyskytujúcich sa alarmov prostredníctvom prehliadky minulých záznamov. Venujte osobitnú pozornosť počtu chýb overenia alarmov série ET a problémov s prekročením časového limitu, pretože tieto indikujú základné komunikačné problémy s modulom IO.
Počet úspešných komunikácií: Odráža počet úspešných komunikácií medzi systémom a modulom IO a ukazuje celkové komunikačné zdravie systému.
Chyby overenia: Zobrazuje počet chýb overenia pri dátových komunikáciách medzi systémom a modulom IO. Vysoký počet chýb môže naznačovať problémy s integritou dát, ktoré vyžadujú okamžitú pozornosť.
Časové limity: Zobrazuje počet chýb komunikačného pripojenia medzi systémom a IO modulom, čo signalizuje potenciálne poruchy v prenose dát, ktoré by mohli ovplyvniť prevádzku stroja.
Krok 2: Interpretácia stavu alarmu série ET
Ak chcete efektívne odstrániť alarm série ET, najprv skontrolujte informácie o alaroch pre chybové (ERRxxx) a varovné (ALMxxx) kódy. Najnovšie alarmy sú uvedené ako „Aktuálny alarm“. Postupujte podľa pokynov na vyriešenie problémov a stlačte tlačidlo resetu, aby ste alarm vymazali a obnovili normálny chod systému.
Ak dojde k zlyhaniu CNC systému, zobrazia sa až päť aktuálnych alarmov. Zaznamenajte varovný kód a vykonajte odporúčané opatrenia alebo v prípade potreby kontaktujte odborný servis.
Dodržaním týchto krokov môžete rýchlo diagnostikovať a odstrániť alarm série ET, čím znížite výpadkový čas a zvýšite produktivitu.
Krok 3: Riešenie problémov s alarmom série ET
Alarm série ET – Chybový kód
ERR001: Alarm bezpečnostnej svetelnej opony
Príčina: Keď os y smeruje nadol, ľudské telo alebo iné predmety vstúpia do oblasti svetelného záclony.
Riešenie: Skontrolujte, či sa niekto nachádza v oblasti svetelnej záclony, alebo či je bezpečnostná mriežka poškodená.
ERR002: Odchýlka polohy osí Y1 a Y2
(Upozornenie sa zobrazí pri vzniku chyby v manuálnom režime a tiež pri vzniku chyby počas ohýbania.)
Príčina: Absolútna odchýlka súradnicovej hodnoty osí Y1 a Y2 presahuje nastavenú maximálnu povolenú odchýlku osi Y.
Riešenie: Najprv skontrolujte, či je polohová chyba osí Y1 a Y2 mimo tolerancie. Potom overte, či lineárny enkóder funguje správne, alebo či je neplatný. Nakoniec skontrolujte, či nedošlo k poruche mechanického prenosu, a či nie je povolená hodnota polohovej odchýlky pre systémové parametre Y1 a Y2 nastavená príliš nízko.
ERR003: Upozornenie pri prekročení maximálnej povolenej tlakovej hodnoty stroja
Príčina: Zvolená nesprávna forma alebo materiál.
Spracovanie:
1. Overiť výber formy a materiálu:
Uistite sa, že forma a materiál boli vybrané správne.
2. Skontrolovať tlak pri ohybe:
Skontrolujte, či je tlak pri ohybe v programe, v syntéze a na programovacom rozhraní príliš vysoký.
3. Posúdenie tlaku:
Ak zobrazený tlak prekračuje povolený limit nástroja:
Vymeňte formu alebo materiál.
Ak je zobrazený tlak v rámci povolenej hodnoty:
Overte správnosť nastavenia výšky horného a dolného dielu formy.
ERR004: Alarm, keď tlak prekročí povolenú hodnotu formy
Príčina: Zvolená nesprávna forma alebo materiál.
Spracovanie:
1. Skontrolujte, či sú správne vybrané formy a materiál.
2. Skontrolujte, či je v programe, syntéze a programovacom rozhraní príliš veľký tlak pri ohybe.
Ak zobrazený tlak prekračuje povolený tlak formy, vymeňte formu alebo materiál.
Ak je zobrazený tlak v rámci povoleného rozsahu formy, uistite sa, že sú správne nastavené výšky hornej a dolnej formy.
ERR005: Prekročený limit tlaku pri ohybe
Príčina: Zvolená nesprávna forma alebo materiál.
Spracovanie:
1. Skontrolujte, či sú správne vybrané formy a materiál.
2. Skontrolujte, či je v programe, syntéze a programovacom rozhraní príliš veľký tlak pri ohybe.
3. Ak zobrazený tlak prekračuje povolený tlak formy, vymeňte formu alebo materiál.
4. Ak je zobrazený tlak v rámci povoleného rozsahu formy, uistite sa, že sú správne nastavené výšky hornej a dolnej formy.
ERR006: Časový limit komunikácie pri detekcii tlaku
Príčina: Časový limit komunikácie medzi systémom a IO doskou.
Riešenie: Uistite sa, že sú správne nastavené typy IO dosiek a že sú správne pripojené komunikačné linky RS-485.
CHYBA007: Porucha kanála detekcie tlaku
Príčina: Analogová hodnota je príliš nízka.
Riešenie: Potvrďte správne pripojenie analogových signálnych vodičov.
CHYBA008–CHYBA012: Super pozitívny tvrdý limit osi X–Z2
(Upozornenie sa zobrazí po ohybe; upozornenie sa zobrazí aj v ručnom režime)
Príčina: Pozitívny koncový spínač každej osi sa aktivuje počas ohybu.
Spracovanie:
1. Skontrolujte, či sa každá os dostala do oblasti pozitívneho koncového spínača.
2. Skontrolujte, či nefunguje správne pozitívny koncový spínač každej osi.
3. Pomocou rozhrania ručného ovládania presuňte každú os mimo oblasti koncového spínača.
CHYBA013–CHYBA017: Os X–Z1 prekročila negatívny tvrdý limit
(Upozornenie sa zobrazí pri ohýbaní a vyhľadávaní nulovej polohy; upozornenie sa zobrazí pri prepnutí do manuálneho režimu)
Príčina: záporný koncový spínač každej osi sa aktivuje počas ohýbania.
Spracovanie:
1. V rozhraní manuálneho ovládania posuňte každú os tak, aby ste opustili oblasť koncového spínača.
2. Skontrolujte, či každá os vstupuje do oblasti záporného koncového spínača.
3. Skontrolujte, či je záporný koncový spínač každej osi nefunkčný.
ERR018–ERR022: Nadmerné kladné mäkké limity osí X–Z2
Príčina: súradnica stroja každej osi presahuje nastavenú kladnú pozíciu mäkkej hranice definovanú systémovým parametrom.
Riešenie: Skontrolujte, či je nastavená kladná pozícia mäkkej hranice každej osi v systémovom parametri vhodná.
ERR023–ERR027: Prekročenie zápornej mäkkej hranice osí X–Z1
Príčina: súradnica stroja každej osi presahuje nastavenú zápornú pozíciu mäkkej hranice definovanú systémovým parametrom.
Riešenie: Skontrolujte, či je záporná soft-limitná poloha každej osi nastavená systémovým parametrom vhodne.
ERR028: Upozornenie na prekročenie lehoty stroja
Príčina: Lehota používania stroja uplynula.
Riešenie: Kontaktujte dodávateľa.
ERR029–ERR034: Výstražné hlásenie servoohrievača pre jednotlivé osi
Príčina: Servoohrievač príslušnej osi vydal výstražné hlásenie alebo sa nepodarilo nadviazať spojenie so servoohrievačom.
Riešenie: Skontrolujte príčinu výstražného hlásenia servoohrievača alebo skontrolujte pripojovací kábel medzi systémom a servoohrievačom.
ERR035–ERR040: Výstražné hlásenie enkodéra pre jednotlivé hriadele
Príčina: Signál enkodéra príslušného hriadeľa je nesprávny.
Riešenie: Skontrolujte zapojenie signálov súvisiacich s enkodérom v pripojovacom kábli medzi systémom a servoohrievačom.
ERR041–ERR046: Neobvyklá výstraha servomotoru v režime bez pohybu pre každú os
Príčina: Ak príslušná os nedostane príkaz na pohyb, zistí sa, že spätnoväzobné súradnice sú neobvyklé.
Riešenie: Skontrolujte kábel pripojenia enkodéra.
ERR047–ERR052: Neobvyklá výstraha servomotoru v režime pohybu pre každú os
Príčina: Výstraha sledovania polohy pre každú os.
Riešenie: Skontrolujte, či je povolená hodnota chyby sledovania polohy nastavená príliš nízko.
ERR053: Výstraha výpadku napájania
Príčina: Zistené je, že napájací napätie systému je príliš nízke.
Riešenie: Skontrolujte, či je napájanie v poriadku.
ERR054: Systémová výstraha
Príčina: Interná výnimka systému.
Riešenie: Kontaktujte dodávateľa.
CHYBA055: Alarm núdzového zastavenia
Príčina: Zistené bolo stlačenie kľúča núdzového zastavenia.
Riešenie: Skontrolujte, či je kľúč núdzového zastavenia stlačený.
CHYBA056: V oblasti obmedzenia krútiaceho momentu
Príčina: Prekročil sa maximálny krútiaci moment motora.
Riešenie: Skontrolujte, či je rýchlosť alebo zrýchlenie osi Y nastavené príliš vysoko.
CHYBA057: Vzdialenosť medzi Z1 a Z2 je príliš malá
Príčina: Os Z pri ručnom ovládaní v režime ručného ovládania prekročila bezpečnostnú vzdialenosť určenú systémovým parametrom 603: z1z2.
Riešenie: Skontrolujte, či sú systémové parametre nastavené vhodne.
ERR059: Upozornenie na prekročenie lehoty
Príčina: Zostávajúca použiteľná doba systému je kratšia ako 2 dni.
Riešenie: Kontaktujte dodávateľa.
ERR060: Spätný prevodový stupeň 2 prekračuje zápornú mäkkú hranicu
Príčina: Pri používaní spätného prevodového stupňa 2 sú súradnice stroja v osi X mimo nastavenej zápornej mäkkej hranice v osi X, ktorú definuje systémový parameter.
Riešenie: Skontrolujte, či je spätný prevodový stupeň vybraný primerane.
ERR061: Alarm bezpečnostného dverí
Príčina: Bezpečnostné dvere boli počas prevádzky otvorené.
Riešenie: Skontrolujte, či sú bezpečnostné dvere uzavreté.
ERR062: Alarm klimatizácie
Príčina: Porucha klimatizácie.
Riešenie: Skontrolujte klimatizáciu.
ERR063: Časový limit kompenzácie odklonu
Príčina: Kompenzácia odklonu sa po dlhú dobu nedokáže dokončiť.
Riešenie: Skontrolujte, či je nastavená príliš malá presnosť kompenzácie odklonu.
ERR064: Chyba smeru kompenzácie odklonu
Príčina: Chybný smer otáčania motora pre kompenzáciu odklonu.
Riešenie: Skontrolujte, či je správne zapojený motor pre kompenzáciu odklonu.
ERR065: Alarm núdzového zastavenia 1
Príčina: Vstupný signál alarmu núdzového zastavenia 1 je platný.
Riešenie: Skontrolujte vstupný signál alarmu núdzového zastavenia 1.
Alarmy série ET – Kód alarmu
ALM001–ALM006 Zlyhanie hľadania počiatku osi X–Z2
Príčina: Počas hľadania systém nedetekuje počiatočný signál príslušnej osi alebo je nesprávne nastavená počiatočná súradnica príslušnej osi.
Riešenie: Skontrolujte, či je vzdialenosť hľadania v tretej sekcii príslušnej osi v systémových parametroch menšia ako jedna výška závitu. Okrem toho overte počiatočné súradnice príslušnej osi.
ALM007–ALM011 Prekročenie kladného pevného limitu osi X–Z2
Príčina: V ručnom režime sa aktivuje kladný koncový spínač príslušného hriadeľa.
Riešenie: Skontrolujte, či príslušný hriadeľ vstupuje do oblasti kladného koncového spínača alebo či kladný koncový spínač hriadeľa nefunguje správne. V rozhraní ručného ovládania presuňte príslušnú os tak, aby opustila oblasť koncového spínača.
ALM012–ALM016 Prekročenie záporného pevného limitu osi X–Z1
Príčina: V ručnom režime sa aktivuje záporný koncový spínač príslušného hriadeľa.
Riešenie: Skontrolujte, či príslušná os vstupuje do oblasti záporového koncového spínača alebo či zlyhá záporový koncový spínač príslušnej osi. Presuňte príslušnú os v rozhraní manuálneho ovládania, aby ste opustili oblasť koncového spínača.
ALM017–ALM021 Os X–Z2 prekročenie kladného softvérového koncového limitu
Príčina: V manuálnom režime sa aktivuje kladný softvérový koncový limit príslušnej osi.
Riešenie: Presuňte príslušnú os v rozhraní manuálneho ovládania, aby ste opustili oblasť softvérového koncového limitu, a skontrolujte, či je nastavenie softvérového koncového limitu v systémových parametroch vhodné.
ALM022–ALM026 Os X–Z1 prekročenie záporového softvérového koncového limitu
Príčina: V manuálnom režime sa aktivuje záporový softvérový koncový limit príslušnej osi.
Riešenie: Presuňte príslušnú os v rozhraní manuálneho ovládania, aby ste opustili oblasť softvérového koncového limitu, a skontrolujte, či je nastavenie softvérového koncového limitu v systémových parametroch vhodné.
ALM027 Odchýlka polohy osí Y1 a Y2 presahuje limit
Príčina: Absolútna odchýlka súradnicovej hodnoty osí Y1 a Y2 presahuje maximálnu povolenú odchýlku osi Y v manuálnom režime.
Riešenie: Skontrolujte, či je chyba polohy osí Y1 a Y2 mimo tolerancie; overte, či je lineárny enkóder neplatný; skontrolujte mechanický prenos na prítomnosť poruchy. Posuňte osi Y1 a Y2 v smere, ktorý znižuje odchýlku polohy v ose.
ALM028–ALM033 – Odchýlka nulovej polohy osí X–Z2 presahuje limit
Príčina: V režime referenčného bodu sa hodnota súradnice stroja príslušnej osi po vyhľadaní počiatku výrazne líši od hodnoty uloženej v systémových parametroch 260–263, 608–609.
Riešenie: Skontrolujte, či sú systémové parametre 260–263, 608–609 nastavené správne.
ALM035 – Upozornenie na mazaciu pumpu
Príčina: Výstupný tlak mazacej pumpy je nedostatočný.
Riešenie: Skontrolujte, či je mazacia tuková hmota úplne spotrebovaná. Ak áno, doplňte mazací tuk typu č. 00 s extrémnym tlakom na báze lítia. Ak nie, skontrolujte, či je mazacia pumpa v poriadku, či netiekne mazací potrubný systém a či je signálny kábel mazacej pumpy správne pripojený.
ALM035 – Nástroj nie je upnutý
Príčina: Nie je zistený žiaden signál zaškrtnutia hydraulického držiaka na náradie.
Ošetrenie: Skontrolujte, či je vedenie signalizácie zaškrtnutia držadla hydraulického nástroja správne.
ALM036 ZLZ2 Rozpätie príliš malé
Príčina: Os z v režime manuálneho ovládania prekračuje bezpečnú vzdialenosť systému 603: z1z2.
Spracovanie: Skontrolujte, či sú parametre nastavené systémovými parametrami primerané.
ALM037 Varovanie bezpečnostného svetla
Príčina: Signál svetelnej záclony je potvrdený ako platný.
Liečba: Skontrolujte, či je záves svetla zablokovaný.
ALM038 Predčasné varovanie
Príčina: Zostávajúca použiteľná doba systému je kratšia ako 2 dni.
Riešenie: Kontaktujte dodávateľa.
ALM039 Pozitívna hranica kompenzácie odchýlky
Príčina: Mechanizmus kompenzácie odklonu prekročil kladný limit.
Riešenie: Skontrolujte smer pohybu mechanizmu kompenzácie odklonu a či je správne pripojený signál limitu.
ALM040 Kompenzácia odklonu – záporný limit
Príčina: Mechanizmus kompenzácie odklonu prekročil záporný limit.
Riešenie: Skontrolujte smer pohybu mechanizmu kompenzácie odklonu a či je správne pripojený signál limitu.
ALM041 Kompenzácia odklonu
Príčina: Výstraha týkajúca sa kompenzácie odklonu.
Riešenie: Skontrolujte, či je nastavenie presnosti kompenzácie odklonu príliš malé.
ALM042 Naklonenie osi Y
Príčina: Vstupný signál naklonenia osi Y je platný.
Riešenie: Skontrolujte, či sú osi Y1 a Y2 rovnobežné, a či je správne nastavený počiatok.
Záver
Zhrnutie: Kľúčom k rýchlej diagnostike alarmov formy série ET je zvládnutie základných krokov na účinné identifikáciu a odstránenie bežných porúch. Ak budete postupovať podľa postupov uvedených v tomto článku – napríklad kontrolou elektrických spojení, kalibráciou systémových parametrov a vykonávaním pravidelnej údržby – minimalizujete prostoj a zabezpečíte efektívnosť výroby.
Ak potrebujete ďalšiu pomoc alebo podrobnejšie technické informácie, neváhajte kontaktovať náš tím technickej podpory JUGAO CNC MACHINE. Radi vám poskytneme odborné rady a dodatočné zdroje, ktoré vám pomôžu efektívnejšie využívať naše produkty. Ďalšie informácie o údržbe ohýbačiek a optimalizácii ich výkonu nájdete tiež v našich iných technických dokumentoch.

