















































Быстрая диагностика и устранение аварийных неисправностей в сериях ET
Столкнулись ли вы с проблемами, связанными с аварийными сигналами на вашем полностью электрическом сервоприводном гибочном станке серии ET? Вы попали по адресу. В этой статье представлено подробное руководство по быстрой диагностике и устранению аварийных сигналов серии ET, что обеспечит бесперебойную и эффективную работу производственных процессов. Хотя аварийные сигналы серии ET встречаются часто, при правильном подходе их можно оперативно устранить и вернуть оборудование в оптимальный рабочий режим. Независимо от того, новичок ли вы в работе с этой системой или стремитесь оптимизировать процесс диагностики, данное руководство содержит ключевые шаги, которые помогут вам эффективно решать различные проблемы, связанные с аварийными сигналами.
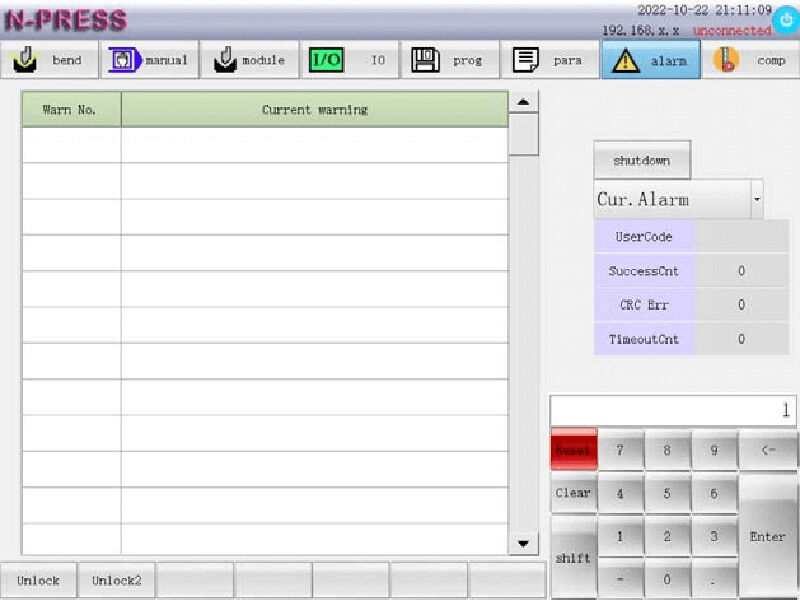
Шаг 1: Доступ к интерфейсу аварийных сигналов серии ET
Нажмите клавишу функции «alarm» («тревога»), чтобы открыть интерфейс и просмотреть все сведения о тревогах серии ET. Данный интерфейс предоставляет полное отображение текущих тревог, записей о тревогах, а также других важных статистических данных, таких как количество успешных операций, ошибок верификации и превышений времени ожидания.
Анализ записей о тревогах
Проанализируйте частоту и типы возникающих тревог, изучив прошлые записи. Особое внимание уделите количеству ошибок верификации тревог серии ET и проблемам с превышением времени ожидания, поскольку они указывают на наличие скрытых проблем в коммуникации с модулем ввода-вывода (IO).
Успешные операции: отражают количество успешных обменов данными между системой и модулем ввода-вывода (IO), что свидетельствует о состоянии связи в целом.
Ошибки верификации: отображают количество ошибок верификации при передаче данных между системой и модулем ввода-вывода (IO). Большое количество таких ошибок может указывать на проблемы с целостностью данных, требующие немедленного внимания.
Время ожидания: Показывает количество ошибок установления соединения при обмене данными между системой и модулем ввода-вывода (IO), что может свидетельствовать о потенциальных нарушениях передачи данных, влияющих на работу оборудования.
Шаг 2: Интерпретация статуса аварийной сигнализации серии ET
Для эффективного устранения аварийной сигнализации серии ET сначала проверьте информацию об аварии на наличие кодов ошибок (ERRxxx) и предупреждений (ALMxxx). Самые последние аварии отображаются как «Текущая авария». Следуйте инструкциям по устранению неисправностей и нажмите клавишу сброса для очистки аварийной сигнализации и восстановления нормальной работы системы.
При возникновении сбоя в системе ЧПУ на дисплее отображается до пяти текущих аварий. Запишите код предупреждения и выполните рекомендованные действия; при необходимости обратитесь к специалистам по техническому обслуживанию.
Следуя этим шагам, вы сможете быстро диагностировать и устранять аварийную сигнализацию серии ET, сокращая простои и повышая производительность.
Шаг 3: Устранение проблем с аварийной сигнализацией серии ET
Аварийная сигнализация серии ET — код ошибки
ERR001: Аварийная сигнализация светового защитного экрана
Причина: При движении оси Y вниз человеческое тело или другие объекты попадают в зону светового занавеса.
Меры устранения: Проверьте, находится ли кто-либо в зоне светового занавеса, или неисправна ли защитная решётка.
ERR002: Отклонение положения осей Y1 и Y2
(Сигнал тревоги появится при возникновении ошибки в ручном режиме, а также при возникновении ошибки во время гибки.)
Причина: Отклонение абсолютных координатных значений осей Y1 и Y2 превышает установленное максимальное допустимое отклонение для оси Y.
Меры устранения: Во-первых, проверьте, выходит ли погрешность положения осей Y1 и Y2 за пределы допуска. Во-вторых, убедитесь, что линейный энкодер функционирует корректно или не является неисправным. В-третьих, проверьте наличие неисправности в механической передаче, а также то, не задано ли слишком малое допустимое значение отклонения положения для параметров системы Y1 и Y2.
ERR003: Сигнал тревоги при превышении давлением максимально допустимого значения для станка
Причина: Выбрана неправильная оснастка или материал.
Обработка:
1. Проверка формы и выбор материала:
Убедитесь, что форма и материал выбраны правильно.
2. Проверка давления при гибке:
Проверьте, не превышает ли давление при гибке в программе, в процессе синтеза и на интерфейсе программирования допустимого значения.
3. Оценка давления:
Если отображаемое давление превышает допустимый предел станка:
Замените форму или материал.
Если отображаемое давление находится в пределах допустимого диапазона:
Проверьте правильность установки высоты верхней и нижней матриц.
ERR004: Сигнал тревоги при превышении давлением допустимого значения для формы
Причина: Выбрана неправильная оснастка или материал.
Обработка:
1. Проверьте, правильно ли выбраны пресс-форма и материал.
2. Убедитесь, что давление изгиба в программе, при синтезе и на интерфейсе программирования слишком велико.
Если отображаемое давление превышает допустимое давление для пресс-формы, замените пресс-форму или материал.
Если отображаемое давление находится в пределах допустимого диапазона для пресс-формы, убедитесь, что высота верхней и нижней пресс-форм установлена правильно.
ERR005: Превышено предельное давление для изгиба
Причина: Выбрана неправильная оснастка или материал.
Обработка:
1. Проверьте, правильно ли выбраны пресс-форма и материал.
2. Убедитесь, что давление изгиба в программе, при синтезе и на интерфейсе программирования слишком велико.
3. Если отображаемое давление превышает допустимое давление для пресс-формы, замените пресс-форму или материал.
4. Если отображаемое давление находится в пределах допустимого диапазона для пресс-формы, убедитесь, что высота верхней и нижней пресс-форм установлена правильно.
ERR006: Тайм-аут связи при обнаружении давления
Причина: тайм-аут связи между системой и платой ввода-вывода.
Способ устранения: убедитесь, что тип платы ввода-вывода задан правильно и линия связи RS-485 подключена надёжно.
ERR007: Неисправность канала обнаружения давления
Причина: Аналоговое значение слишком низкое.
Решение: Убедитесь в правильности подключения аналоговых сигнальных линий.
ERR008–ERR012: Сверхположительный жёсткий предел по осям X–Z2
(Сигнал тревоги появится при гибке; сигнал тревоги появится при работе в ручном режиме)
Причина: Контакт положительного концевого выключателя каждой оси срабатывает во время гибки.
Обработка:
1. Проверьте, попала ли каждая ось в зону срабатывания положительного концевого выключателя.
2. Убедитесь, что положительный концевой выключатель каждой оси работает исправно.
3. С помощью интерфейса ручного управления переместите каждую ось из зоны срабатывания концевого выключателя.
ERR013–ERR017: Ось X–Z1 превысила отрицательный жёсткий предел
(Сигнал тревоги будет подан при изгибе и поиске нулевой точки; сигнал тревоги будет подан при переходе в ручной режим)
Причина: срабатывание конечного выключателя отрицательного хода для каждого из валов во время изгиба.
Обработка:
1. Переместите каждый из валов в интерфейсе ручного управления, чтобы выйти из зоны действия конечного выключателя.
2. Проверьте, не попадает ли каждый из валов в зону действия конечного выключателя отрицательного хода.
3. Проверьте, не вышел ли из строя конечный выключатель отрицательного хода для каждого из валов.
ERR018–ERR022: Превышение положительного программного ограничения по осям X–Z2
Причина: координата станка по каждой оси превышает установленное в системных параметрах положительное программное ограничение.
Метод устранения: проверьте корректность установки положительного программного ограничения по каждой оси в системных параметрах.
ERR023–ERR027: Превышение отрицательного программного ограничения по осям X–Z1
Причина: координата станка по каждой оси превышает установленное в системных параметрах отрицательное программное ограничение.
Метод устранения: Проверьте, корректно ли задано отрицательное значение предельной позиции по каждой оси в системных параметрах.
ERR028: Предупреждение о просрочке станка
Причина: Станок просрочен.
Метод устранения: Обратитесь к поставщику.
ERR029–ERR034: Предупреждение сервопривода соответствующей оси
Причина: Сервопривод соответствующей оси выдал предупреждение или произошёл сбой в его подключении.
Метод устранения: Определите причину предупреждения сервопривода или проверьте соединительный кабель между системой и сервоприводом.
ERR035–ERR040: Предупреждение энкодера соответствующего вала
Причина: Сигнал энкодера соответствующего вала некорректен.
Метод устранения: Проверьте монтаж проводов, связанных с сигналами энкодера, в соединительном кабеле между системой и сервоприводом.
ERR041–ERR046: Аварийная сигнализация нештатного состояния сервопривода каждой оси в режиме отсутствия движения
Причина: при отсутствии команды на движение для соответствующей оси обнаружено аномальное значение обратной связи по координатам.
Меры устранения: проверьте кабель подключения энкодера.
ERR047–ERR052: Аварийная сигнализация нештатного состояния сервопривода каждой оси в режиме движения
Причина: аварийная сигнализация отслеживания положения для каждой оси.
Меры устранения: проверьте, не установлено ли допустимое значение погрешности отслеживания положения слишком малым.
ERR053: Аварийная сигнализация потери питания
Причина: зафиксировано снижение напряжения системного источника питания ниже допустимого уровня.
Меры устранения: проверьте исправность источника питания.
ERR054: Системная аварийная сигнализация
Причина: Внутреннее исключение системы.
Метод устранения: Обратитесь к поставщику.
ERR055: Аварийная остановка
Причина: Обнаружено нажатие кнопки аварийной остановки.
Метод устранения: Проверьте, нажата ли кнопка аварийной остановки.
ERR056: Превышение предела крутящего момента
Причина: Превышен максимальный крутящий момент двигателя.
Метод устранения: Проверьте, не заданы ли слишком высокие значения скорости или ускорения по оси Y.
ERR057: Расстояние между Z1 и Z2 слишком мало
Причина: При ручном управлении движение по оси Z превышает безопасное расстояние, заданное в системном параметре 603: z1z2.
Метод устранения: Проверьте корректность установленных значений системных параметров.
ERR059: Предупреждение о просрочке
Причина: Оставшееся время работы системы менее 2 дней.
Рекомендуемые действия: Свяжитесь с поставщиком.
ERR060: Задняя передача 2 превышает отрицательный программный предел
Причина: При использовании задней передачи 2 координата станка по оси X превышает установленное системным параметром отрицательное программное ограничение по оси X.
Рекомендуемые действия: Проверьте, корректно ли выбрана задняя передача.
ERR061: Сигнал тревоги от аварийной двери
Причина: Аварийная дверь была открыта во время эксплуатации.
Рекомендуемые действия: Проверьте, закрыта ли аварийная дверь.
ERR062: Сигнал тревоги кондиционера
Причина: Неисправность кондиционера.
Метод устранения: Проверьте кондиционер.
ERR063: Тайм-аут компенсации отклонения
Причина: Компенсация отклонения не может быть завершена в течение длительного времени.
Метод устранения: Проверьте, не установлена ли чрезмерно малая точность компенсации отклонения.
ERR064: Ошибка направления компенсации отклонения
Причина: Ошибка направления вращения двигателя компенсации отклонения.
Метод устранения: Проверьте правильность подключения проводов двигателя компенсации отклонения.
ERR065: Аварийная остановка — сигнал тревоги 1
Причина: Входной сигнал аварийной остановки — сигнал тревоги 1 — является активным.
Метод устранения: Проверьте входной сигнал аварийного останова (сигнал тревоги 1).
Серия ET — Сигналы тревоги — Коды тревог
ALM001–ALM006: Неудачный поиск начальной точки по осям X–Z2
Причина: Система не обнаруживает сигнал начальной точки соответствующей оси во время поиска или начальная координата соответствующей оси задана некорректно.
Метод устранения: Проверьте, не является ли расстояние поиска для третьего участка соответствующей оси в системных параметрах меньше одного шага. Также проверьте начальные координаты соответствующей оси.
ALM007–ALM011: Превышение положительного жёсткого ограничения по осям X–Z2
Причина: В ручном режиме сработал положительный концевой выключатель соответствующего вала.
Метод устранения: Проверьте, вошёл ли соответствующий вал в зону срабатывания положительного концевого выключателя или не произошёл ли отказ самого положительного концевого выключателя. Переместите соответствующую ось через интерфейс ручного управления, чтобы вывести её из зоны действия концевого выключателя.
ALM012–ALM016: Превышение отрицательного жёсткого ограничения по осям X–Z1
Причина: В ручном режиме сработал отрицательный концевой выключатель соответствующего вала.
Устранение: Проверьте, входит ли соответствующий вал в зону отрицательного концевого выключателя или неисправен ли отрицательный концевой выключатель данного вала. Переместите соответствующую ось в интерфейсе ручного управления, чтобы выйти из зоны концевого выключателя.
ALM017–ALM021: Сверхположительный мягкий предел осей X–Z2
Причина: В ручном режиме сработал положительный мягкий предел соответствующего вала.
Устранение: Переместите соответствующую ось в интерфейсе ручного управления, чтобы выйти из зоны мягкого предела, и проверьте корректность настройки мягкого предела в системных параметрах.
ALM022–ALM026: Превышение отрицательного мягкого предела осей X–Z1
Причина: В ручном режиме сработал отрицательный мягкий предел соответствующей оси.
Устранение: Переместите соответствующую ось в интерфейсе ручного управления, чтобы выйти из зоны мягкого предела, и проверьте корректность настройки мягкого предела в системных параметрах.
ALM027: Отклонение положения осей Y1 и Y2 превышает допустимый предел
Причина: Отклонение абсолютных координат осей Y1 и Y2 превышает установленное максимальное значение отклонения оси Y в ручном режиме.
Метод устранения: Проверьте, выходит ли погрешность положения осей Y1 и Y2 за пределы допуска; убедитесь в исправности линейного энкодера; проверьте механическую передачу на наличие неисправностей. Переместите оси Y1 и Y2 в направлении, уменьшающем отклонение положения по оси.
ALM028–ALM033 Отклонение нулевого положения осей X–Z2 превышает допустимый предел
Причина: В режиме определения исходной точки координата машинной системы соответствующей оси после поиска нулевой точки значительно отличается от значения, записанного в системных параметрах 260–263, 608–609.
Метод устранения: Проверьте правильность установки системных параметров 260–263, 608–609.
ALM035 Предупреждение о работе смазочного насоса
Причина: Давление на выходе смазочного насоса недостаточно.
Метод устранения: Проверьте, полностью ли израсходован смазочный состав. Если да — добавьте литиевую смазку с экстремальными давлениями марки № 00. Если нет — проверьте работоспособность смазочного насоса, наличие утечек в смазочной магистрали, а также правильность подключения сигнального кабеля смазочного насоса.
ALM035 Инструмент не зажат
Причина: Не обнаружен сигнал зажима гидравлического инструментального патрона.
Метод устранения: Проверьте правильность подключения проводов сигнала зажима гидравлического инструментального патрона.
ALM036 Расстояние между ZL и Z2 слишком мало
Причина: Ось Z в ручном режиме управления превышает безопасное расстояние, заданное системным параметром 603: z1z2.
Метод устранения: Проверьте корректность установленных значений системных параметров.
ALM037 Предупреждение о безопасности светового занавеса
Причина: Обнаружен действительный сигнал светового занавеса.
Метод устранения: Проверьте, не перекрыт ли световой занавес.
ALM038 Предупреждение о просрочке
Причина: Оставшееся время работы системы менее 2 дней.
Рекомендуемые действия: Свяжитесь с поставщиком.
ALM039 Положительный предел компенсации отклонения
Причина: механизм компенсации прогиба превысил положительный предел.
Метод устранения: проверьте направление движения механизма компенсации прогиба и правильность подключения сигнала ограничения.
ALM040 — отрицательный предел компенсации прогиба
Причина: механизм компенсации прогиба превысил отрицательный предел.
Метод устранения: проверьте направление движения механизма компенсации прогиба и правильность подключения сигнала ограничения.
ALM041 — компенсация прогиба
Причина: поступает сигнал о необходимости компенсации прогиба.
Метод устранения: проверьте, не задано ли слишком малое значение точности компенсации прогиба.
ALM042 — наклон по оси Y
Причина: входной сигнал наклона по оси Y является активным.
Метод устранения: проверьте, параллельны ли оси Y1 и Y2, а также правильность установки начальной точки.
Заключение
В заключение, ключ к быстрому устранению аварийных сигналов пресс-форм серии ET заключается в освоении основных шагов, позволяющих эффективно выявлять и устранять типовые неисправности. Следуя процедурам, описанным в данной статье — таким как проверка электрических соединений, калибровка параметров системы и проведение планового технического обслуживания — вы сможете свести простои к минимуму и обеспечить высокую эффективность производства.
Для получения дальнейшей помощи или более подробной технической информации, пожалуйста, свяжитесь с нашей службой технической поддержки JUGAO CNC MACHINE. Мы готовы предоставить вам профессиональные консультации и дополнительные ресурсы, чтобы помочь вам эффективнее использовать нашу продукцию. Также вы можете ознакомиться с другими нашими техническими документами для получения дополнительной информации по техническому обслуживанию гибочных станков и оптимизации их производительности.

