















































Typowe problemy występujące w procesie spawania robotami spawalniczymi
Efekt spawania wykonywanego przez roboty zależy od wielu czynników. Wiele klientów napotyka różne problemy jeszcze przed osiągnięciem biegłości w użytkowaniu robotów spawalniczych. Problemy te wynikają zazwyczaj z nieprawidłowego obsługi lub nieodpowiednich ustawień robota i mogą zostać rozwiązane poprzez odpowiednie dostosowania. Poniżej omówimy niektóre typowe problemy występujące podczas użytkowania robotów spawalniczych oraz sposoby ich rozwiązywania.
I. Nieudane zapłon łuku podczas spawania
1. Łuk jeszcze się nie zapalił

Przyczyna: Program nie zawiera odpowiedniego polecenia zapłonu łuku przed wykonaniem polecenia zakończenia łuku.
Rozwiązanie: Sprawdź, czy dodano dodatkową komendę zakończenia łuku lub dodatkową komendę rozpoczęcia łuku.
2. Niepowodzenie rozpoczęcia łuku, błąd wykrywania sygnału

Metoda rozwiązywania problemu:
1) Sprawdź ustawienie czasu przerwania spawania na stronie parametrów. Zazwyczaj odpowiednie jest ustawienie czasu na 5000 ms.
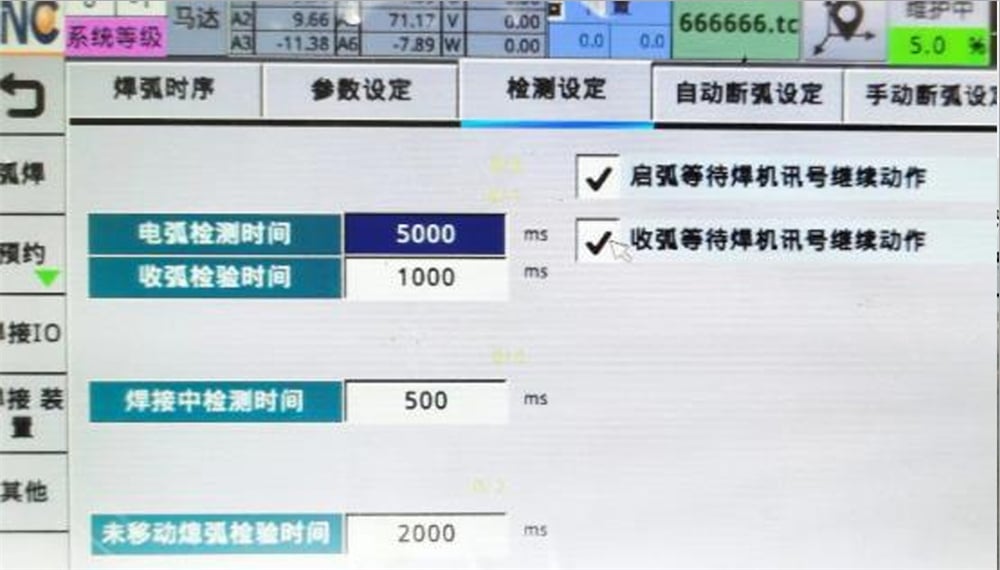
2) Sprawdź, czy sygnał ze spawarki jest prawidłowo przesyłany do systemu.
3) Sprawdź, czy przedmiot roboczy jest uziemiony.
3. Łukowanie i przerwanie drutu spawalniczego
Przyczyny:
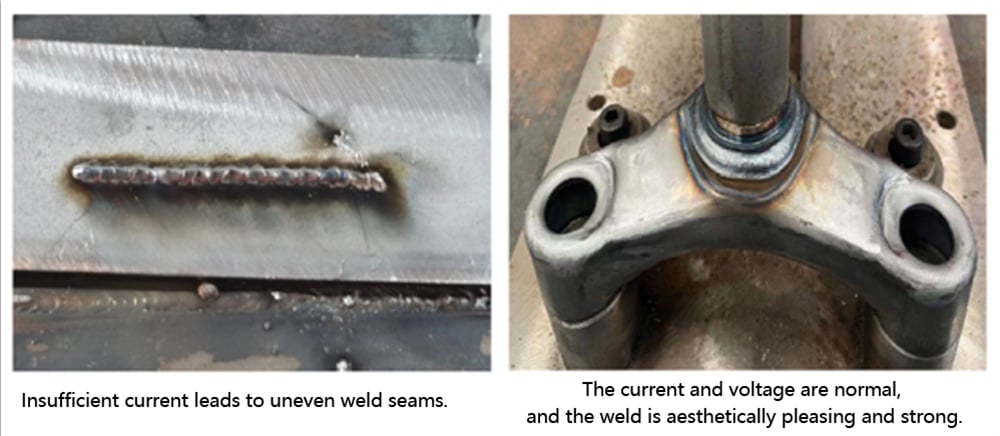
1) Niedopasowanie prądu i napięcia
Rozwiązanie: Należy ustawić odpowiedni prąd i napięcie zgodnie z rzeczywistą grubością przedmiotu roboczego oraz typem spawarki.
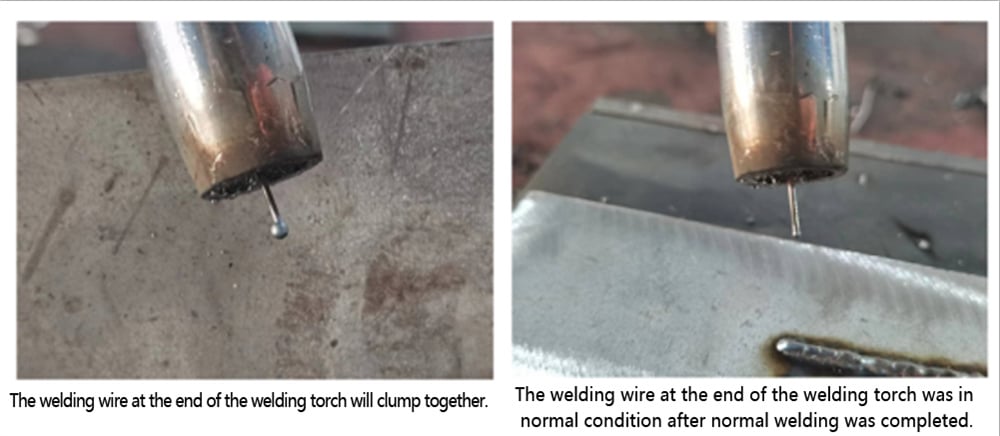
2) Długość drutu spawalniczego jest zbyt duża.
Rozwiązanie: Zazwyczaj długość wystającej części drutu spawalniczego powinna wynosić od 10 do 15 średnic drutu spawalniczego. Wybierz odpowiednią długość drutu spawalniczego w zależności od jego średnicy.
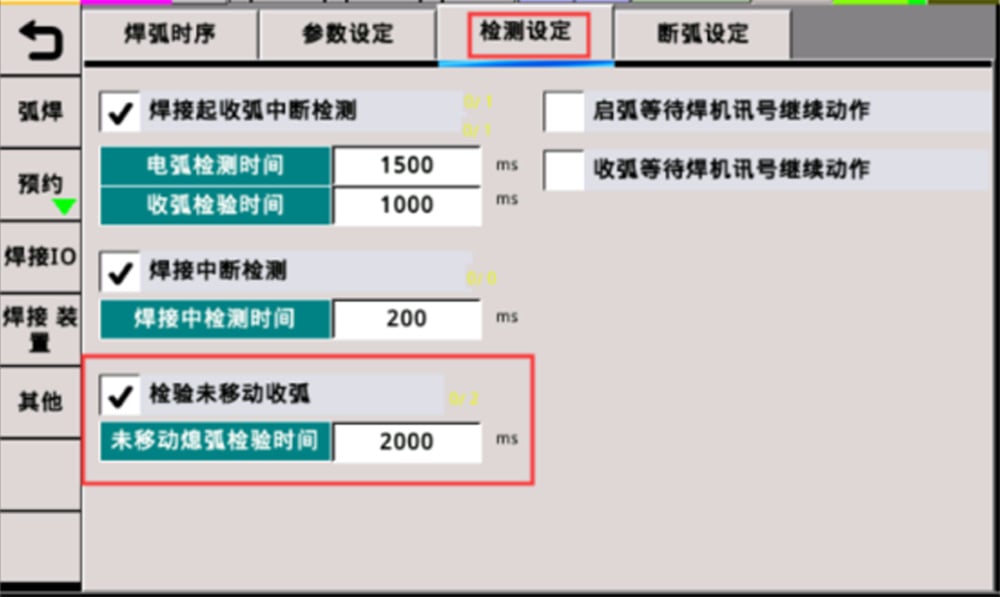
4. Automatyczne gaszenie łuku następuje po zapłonie łuku.

Rozwiązywanie problemów: sprawdź, czy występuje problem z ustawieniem czasu parametru, oraz czy palnik spawalniczy przesunął się z pozycji.
II. Przerwanie łuku podczas spawania.
Przyczyny:
1. Przewód spawalniczy nie styka się z przedmiotem roboczym, co powoduje aktywację alarmu przerwania łuku.
Rozwiązanie: ponownie dostosuj położenie przewodu spawalniczego i przedmiotu roboczego, aby zapewnić pełne stykanie się podczas spawania. (Jednak przewód nie powinien być zbyt blisko przedmiotu roboczego, ponieważ może to spowodować przeżarcie.)
2. Niewłaściwa ścieżka spawania powoduje kolizję palnika spawalniczego i jego automatyczne podniesienie.
Rozwiązanie: zresetuj ścieżkę spawania.
3. Złe połączenie między elektrodami dodatnią i ujemną maszyny spawalniczej.
Rozwiązanie: sprawdź połączenia elektrod dodatniej i ujemnej.
III. Przyczyny niepowodzenia wyłączenia łuku po zakończeniu spawania:
1. Niepowodzenie zakończenia łuku spowodowane błędem wykrywania sygnału.
Przyczyna: Maszyna spawalnicza nie odebrała sygnału od robota, co spowodowało niepowodzenie zakończenia łuku przez robota.
Rozwiązywanie problemów:
(1) Sprawdź, czy parametry ustawień są uzasadnione.
(2) Sprawdź sygnały wejścia/wyjścia (IO) oraz czy sygnał punktu I zakończenia łuku jest nietypowy. Jeśli sygnał punktu I stale wskazuje stan WŁĄCZONY...
(3) Sprawdź, czy w obwodzie występuje zwarcie oraz czy przewód uziemiający jest podłączony w sposób nietypowy.
2. Po rozpoczęciu łuku nie ustawiono polecenia zakończenia łuku.

Przyczyna: Gdy ten alarm pojawia się na panelu programowania (teach pendant), sprawdź, czy polecenie zakończenia łuku zostało pominięte.
Rozwiązanie: Dodaj polecenie zakończenia łuku po poleceniu rozpoczęcia łuku w programie.
Artykuł ten omawia głównie problemy związane z rozpoczęciem łuku, jego zakończeniem oraz przerwaniem łuku w trakcie procesu spawania wykonywanego przez roboty spawalnicze. Użytkownicy mogą skorzystać z zaproponowanych rozwiązań w przypadku wystąpienia takich problemów. Jeśli problem nie zostanie rozwiązany, prosimy o kontakt z osobami technicznymi firmy JUGAO.
Robot spawalniczy to zautomatyzowany robot integrujący wiele funkcji spawania, takich jak spawanie w osłonie gazowej, spawanie łukowe wargonem, cięcie plazmowe oraz spawanie laserowe. Charakteryzuje się wysoką elastycznością, dużą zdolnością adaptacji, wysoką wydajnością spawania oraz stabilną jakością połączeń spawanych i może być szeroko stosowany w różnych dziedzinach, takich jak przemysł maszynowy, przemysł motocyklowy, elektronika precyzyjna oraz górnictwo węgla.

