















































Rask diagnose og håndtering av alarmfeil i ET-serien
Har du problemer med alarm på din ET-serie helt elektriske servobøyemaskin? Du har kommet til riktig sted. Denne artikkelen gir en detaljert veiledning i hvordan du raskt kan feilsøke alarmproblemer på ET-serien, slik at produksjonsdriften blir smidig og effektiv. Selv om alarmer på ET-serien er vanlige, kan du med riktig fremgangsmåte raskt løse dem og gjenopprette optimal ytelse for utstyret ditt. Uansett om du er nybegynner på dette systemet eller ønsker å forbedre feilsøkingsprosessen din, gir denne veiledningen nøkkeltrinnene for å håndtere ulike alarmproblemer effektivt.
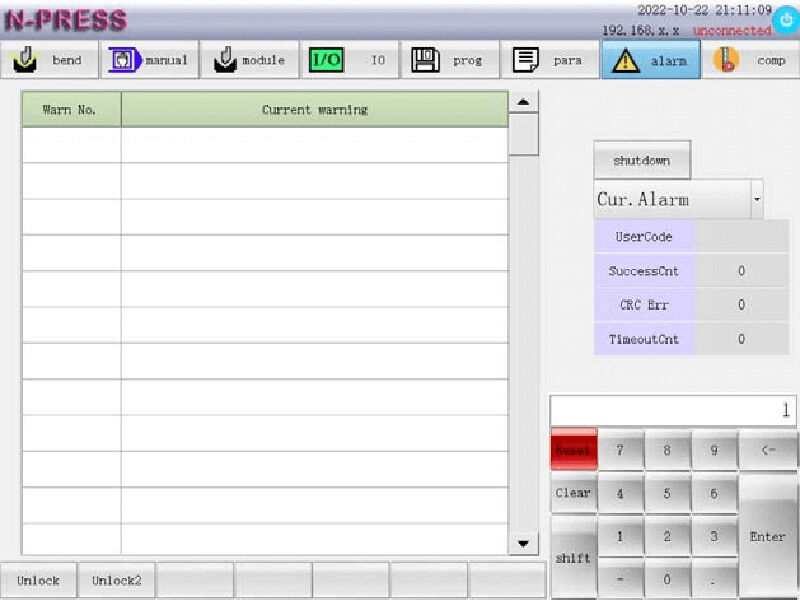
Steg 1: Åpne alarmgrensesnittet for ET-serien
Klikk på funksjonstasten «alarmsystem» for å få tilgang til grensesnittet og vise alle alarmdetaljer for ET-serien. Dette grensesnittet gir en omfattende oversikt over gjeldende alarmer, alarmlogger og andre viktige statistikker, som antall vellykkede kommunikasjoner, verifikasjonsfeil og tidsavbrudd.
Analyser alarmlogger
Forstå frekvensen og typen av alarmer som oppstår ved å gjennomgå tidligere logger. Vær spesielt oppmerksom på antallet verifikasjonsfeil og tidsavbrudd for ET-seriens alarmsystem, da disse indikerer underliggende kommunikasjonsproblemer med IO-modulen.
Vellykkede kommunikasjoner: Viser antallet vellykkede kommunikasjoner mellom systemet og IO-modulen og indikerer systemets generelle kommunikasjonshelse.
Verifikasjonsfeil: Viser antallet verifikasjonsfeil i datakommunikasjonen mellom systemet og IO-modulen. Et stort antall feil kan tyde på problemer med dataintegritet som krever umiddelbar oppmerksomhet.
Tidsavbrudd: Viser antall kommunikasjonsforbindelsesfeil mellom systemet og IO-modulen, noe som signaliserer potensielle forstyrrelser i datatransferen som kan påvirke maskinens drift.
Steg 2: Tolking av alarmstatus for ET-serien
For å håndtere alarmen for ET-serien effektivt, sjekk først alarminformasjonen for feilkoder (ERRxxx) og advarselkoder (ALMxxx). De nyeste alarmene vises som «Gjeldende alarm». Følg instruksjonene for å løse problemene og trykk på tilbakestillingstasten for å nullstille alarmen og gjenopprette normal systemdrift.
Hvis det oppstår en feil i CNC-systemet, vises opp til fem gjeldende alarmer. Registrer advarselkoden og utfør den anbefalte handlingen, eller kontakt faglig vedlikeholdsansvarlig hvis nødvendig.
Ved å følge disse trinnene kan du raskt feilsøke alarmen for ET-serien, redusere nedetid og øke produktiviteten.
Steg 3: Løsning av problemer med alarm for ET-serien
Alarm for ET-serien – Feilkode
ERR001: Alarm for sikkerhetslysforheng
Årsak: Når y-aksen beveger seg nedover, kommer menneskekroppen eller andre objekter inn i lysforhengområdet.
Tiltak: Kontroller om noen befinner seg i lysforhengområdet eller om sikkerhetsgitteret fungerer feilaktig.
ERR002: Avvik i posisjon for Y1- og Y2-akse
(Alarm vil bli vist når feilen oppstår i manuell modus, og alarm vil også bli vist når feilen oppstår under bøyning.)
Årsak: Avviket i absolutt koordinatverdi for Y1-aksen og Y2-aksen overskrider den maksimale tillatte avviksverdien for Y-aksen.
Tiltak: Kontroller først om posisjonsavviket for Y1- og Y2-aksene er utenfor toleransen. Deretter kontroller om lineær enkoder fungerer korrekt eller om den er ugyldig. Til slutt undersøk om det forekommer en feil i den mekaniske overføringen og om den tillatte verdien for posisjonsavvik i systemparameterne for Y1 og Y2 er satt for lavt.
ERR003: Alarm når trykket overskrider den maksimalt tillatte verdien for verktøymaskinen
Årsak: Feil form eller feil materiale valgt.
Behandling:
1. Verifiser form og materialevalg:
Sørg for at formen og materialet er valgt riktig.
2. Sjekk bøyetrykk:
Undersøk om bøyetrykket i programmet, sammenstillingen og programmeringsgrensesnittet er for høyt.
3. Trykkvurdering:
Hvis det viste trykket overstiger maskinverktøyets tillatte grense:
Bytt form eller materiale.
Hvis det viste trykket ligger innenfor tillatt område:
Bekreft at høyden på øvre og nedre matrise er riktig innstilt.
ERR004: Alarm når trykket overstiger den tillatte verdien for formen
Årsak: Feil form eller feil materiale valgt.
Behandling:
1. Sjekk om formen og materialet er valgt riktig.
2. Kontroller om bøyetrykket i programmet, syntesen og programmeringsgrensesnittet er for høyt.
Hvis det viste trykket overskrider det tillatte trykket for formen, bytt formen eller materialet.
Hvis det viste trykket ligger innenfor det tillatte området for formen, må du sikre deg at høyden på øvre og nedre form er satt riktig.
ERR005: Bøyetrykkets grense overskredet
Årsak: Feil form eller feil materiale valgt.
Behandling:
1. Sjekk om formen og materialet er valgt riktig.
2. Kontroller om bøyetrykket i programmet, syntesen og programmeringsgrensesnittet er for høyt.
3. Hvis det viste trykket overskrider det tillatte trykket for formen, bytt formen eller materialet.
4. Hvis det viste trykket ligger innenfor det tillatte området for formen, må du sikre deg at høyden på øvre og nedre form er satt riktig.
ERR006: Tidsavbrudd ved trykkdeteksjonskommunikasjon
Årsak: Kommunikasjonstidsavbrudd mellom systemet og IO-kortet.
Løsning: Sørg for at riktig IO-korttype er valgt og at 485-kommunikasjonskablene er korrekt tilkoblet.
ERR007: Feil i trykkdeteksjonskanal
Årsak: Den analoge verdien er for lav.
Løsning: Bekreft at tilkoblingene til den analoge signallinjen er riktige.
ERR008–ERR12: X–Z2-akse – overste positiv hardgrense
(Alarm utløses ved bøyning; alarm utløses også i manuell modus)
Årsak: Den positive grenseswitchen for hver akse utløses under bøyning.
Behandling:
1. Sjekk om hver akse har kommet inn i området for den positive grenseswitchen.
2. Kontroller om den positive grenseswitchen for hver akse fungerer feilaktig.
3. Bruk manuelt kontrollgrensesnitt til å bevege hver akse ut av området for grenseswitchen.
ERR013–ERR017: X–Z1-akse overskrider den negative hardgrensen
(Alarm utløses ved bøyning og nullpunktfinning; alarm utløses når manuell modus aktiveres)
Årsak: Den negative grenseswitchen for hver akse utløses under bøyning.
Behandling:
1. Beveg hver akse i manuell kontrollgrensesnitt for å forlate området til grenseswitchen.
2. Sjekk om hver akse kommer inn i området til den negative grenseswitchen.
3. Sjekk om den negative grenseswitchen for hver akse er defekt.
ERR018–ERR022: X–Z2-akse – over positiv programvarebegrensning
Årsak: Maskinkoordinaten for hver akse overskrider den positive programvarebegrensningen som er satt i systemparameteren.
Løsning: Sjekk om den positive programvarebegrensningen for hver akse, som er satt i systemparameteren, er riktig.
ERR023–ERR027: X–Z1-akse – under negativ programvarebegrensning
Årsak: Maskinkoordinaten for hver akse overskrider den negative programvarebegrensningen som er satt i systemparameteren.
Behandling: Sjekk om den negative myke grensen for hver akse, som er satt av systemparameteren, er riktig.
ERR028: Maskinverktøyets utløpsalarm
Årsak: Maskinverktøyet er utløpt.
Behandling: Ta kontakt med leverandøren.
ERR029–ERR034: Servodriveralarm for hver akse
Årsak: Servodriveren for den tilsvarende aksen gir en alarm, eller tilkoblingen til servodriveren er feilaktig.
Behandling: Sjekk årsaken til servodriveralarmen eller sjekk tilkoblingskabelen mellom systemet og servodriveren.
ERR035–ERR040: Enkoderalarm for hver akse
Årsak: Enkodersignalet for den tilsvarende aksen er feil.
Behandling: Sjekk kablingen for enkoderrelaterte signaler i tilkoblingskabelen mellom systemet og servodriveren.
ERR041–ERR046: Servoavvikelsesalarm i ikke-bevegelsesmodus for hver akse
Årsak: Når den tilsvarende aksen ikke mottar en bevegingskommando, oppdager systemet at de tilbakemeldte koordinatene er avvikende.
Tiltak: Sjekk kabelen som kobler til enkoderen.
ERR047–ERR052: Servoavvikelsesalarm i bevegelsesmodus for hver akse
Årsak: Posisjonssporingsalarm for hver akse.
Tiltak: Sjekk om den tillatte verdien for posisjonssporingsfeil er satt for lav.
ERR053: Strømbruddsalarm
Årsak: Systemets strømforsyningsspenning oppdages å være for lav.
Tiltak: Sjekk om strømforsyningen er normal.
ERR054: Systemalarm
Årsak: Systemintern unntaksfeil.
Behandling: Ta kontakt med leverandøren.
ERR055: Nødstopalarm
Årsak: Det er oppdaget at nødstopknappen er trykket inn.
Løsning: Sjekk om nødstopknappen er trykket inn.
ERR056: I dreiemomentbegrensning
Årsak: Det maksimale dreiemomentet til motoren er overskredet.
Løsning: Sjekk om y-aksens hastighet eller akselerasjon er satt for høyt.
ERR057: Avstanden mellom Z1 og Z2 er for liten
Årsak: Z-aksen ved manuell kontrollbevegelse i manuell kontrollmodus overskrider sikkerhetsavstanden i systemparameter 603: z1z2.
Løsning: Sjekk om parameterne som er satt i systemparametrene er passende.
ERR059: Forsinkelsesadvarsel
Årsak: Systemets bruksperiode er kortere enn 2 dager.
Tiltak: Kontakt leverandøren.
ERR060: Bakre gir 2 overskrider negativ myk grense
Årsak: Når bakre gir 2 brukes, overskrider maskinens x-akse-koordinat den negative myke grensen for x-aksen som er satt i systemparameteren.
Tiltak: Kontroller om det bakre giret er valgt på en hensiktsmessig måte.
ERR061: Sikkerhetsdør-alarm
Årsak: Sikkerhetsdøren ble åpnet under bruk.
Tiltak: Kontroller om sikkerhetsdøren er lukket.
ERR062: Klimaanlegg-alarm
Årsak: Feil på luftkondisjoneringssystemet.
Tiltak: Sjekk luftkondisjoneringssystemet.
ERR063: Tidsavbrudd for avvikskompensasjon
Årsak: Avvikskompensasjonen kan ikke fullføres innen en lang tid.
Tiltak: Sjekk om nøyaktigheten for avvikskompensasjon er satt for lav.
ERR064: Feil retning for avvikskompensasjon
Årsak: Feil rotasjonsretning på motoren for avvikskompensasjon.
Tiltak: Sjekk om tilkoblingen til motoren for avvikskompensasjon er riktig.
ERR065: Nødstopalarm 1
Årsak: Inngangssignalet for nødstopalarm 1 er gyldig.
Behandling: Kontroller innsignalet for nødstoppalarm 1.
ET-seriens alarm – Alarmkode
ALM001–ALM006 X–Z2-akse: Feilet oppslag av nullpunkt
Årsak: Systemet registrerer ikke nullpunktsignalet for den tilsvarende aksen under oppslaget, eller nullpunktkoordinatene for den tilsvarende aksen er feilaktig konfigurert.
Behandling: Kontroller om søkeavstanden for den tredje delen av den tilsvarende aksen i systemparametrene er mindre enn én pitch. Kontroller også nullpunktkoordinatene for den tilsvarende aksen.
ALM007–ALM011 X–Z2-akse: Overskridelse av positiv mekanisk grense
Årsak: Den positive grenseswitchen for den tilsvarende aksen er utløst i manuell modus.
Behandling: Kontroller om den tilsvarende aksen har beveget seg inn i området for den positive grenseswitchen, eller om den positive grenseswitchen for aksen er defekt. Beveg den tilsvarende aksen i manuell kontrollgrensesnitt for å forlate grenseswitch-området.
ALM012–ALM016 X–Z1-akse: Overskridelse av negativ mekanisk grense
Årsak: Den negative grenseswitchen for den tilsvarende aksen er utløst i manuell modus.
Behandling: Sjekk om den tilsvarende aksen går inn i området for negativ grenseswitch eller om negativ grenseswitch for aksen ikke fungerer. Flytt den tilsvarende aksen i manuelt kontrollgrensesnitt for å gå ut av grenseswitch-området.
ALM017–ALM021 X–Z2-akse, over positiv programvaregrense
Årsak: Den fremadrettede programvaregrensen for den tilsvarende aksen er utløst i manuell modus.
Behandling: Flytt den tilsvarende aksen i manuelt kontrollgrensesnitt for å gå ut av programvaregrensen, og sjekk om innstillingen av programvaregrensen i systemparametrene er riktig.
ALM022–ALM026 X–Z1-akse, over negativ programvaregrense
Årsak: Den negative programvaregrensen for den tilsvarende aksen er utløst i manuell modus.
Behandling: Flytt den tilsvarende aksen i manuelt kontrollgrensesnitt for å gå ut av programvaregrensen, og sjekk om innstillingen av programvaregrensen i systemparametrene er riktig.
ALM027 Posisjonsavvik for Y1- og Y2-aksene overskrider grensen
Årsak: Avviket i absolutt koordinatverdi for Y1- og Y2-aksene overskrider den maksimale avviksinnstillingen for Y-aksen i manuell modus.
Behandling: Sjekk om posisjonsfeilen for Y1- og Y2-aksene er utenfor toleransen; bekreft om den lineære enkoderen er ugyldig; sjekk den mekaniske overføringen for feil. Beveg Y1 og Y2 i en retning som reduserer aksial posisjonsavviket.
ALM028–ALM033 X–Z2-akse: Avvik fra nullposisjon overskrider grensen
Årsak: I referansepunktmodus er maskinkoordinatverdien for den tilsvarende aksen etter oppstart av nullpunktssøk betydelig forskjellig fra verdien registrert i systemparametrene 260–263, 608–609.
Behandling: Sjekk om systemparametrene 260–263, 608–609 er riktig konfigurert.
ALM034 Advarsel fra smørepumpe
Årsak: Utgangstrykket fra smørepumpen er utilstrekkelig.
Behandling: Sjekk om smørefettet er oppbrukt. Hvis ja, fyll på med smørefett type nr. 00 ekstremtrykk-litiumbasert fett. Hvis ikke, sjekk om smørepumpen fungerer normalt, om smøreslangen lekker, og om signalkabelen til smørepumpen er korrekt tilkoblet.
ALM035 Verktøy er ikke spent
Årsak: Ingen spennesignal fra hydraulisk verktøyholder er registrert.
Tiltak: Sjekk om kablingen for spennesignalet til hydraulisk verktøyholder er riktig.
ALM036 ZLZ2 Avstand for liten
Årsak: Z-aksen i manuell kontrollmodus overskrider sikkerhetsavstanden i systemparameter 603: z1z2.
Tiltak: Sjekk om parameterne som er satt i systemparameterne er passende.
ALM037 Advarsel om sikkerhetslysforheng
Årsak: Lysskjermen registrerer et gyldig signal.
Tiltak: Sjekk om lysskjermen er blokkert.
ALM038 Forfaldt advarsel
Årsak: Systemets bruksperiode er kortere enn 2 dager.
Tiltak: Kontakt leverandøren.
ALM039 Avvikskompensasjon – positiv grense
Årsak: Avvikskompensasjonsmekanismen overskrider den positive grensen.
Behandling: Sjekk bevegelsesretningen til avvikskompensasjonsmekanismen og om grensesignalkoblingen er korrekt.
ALM040 Avvikskompensasjon – negativ grense
Årsak: Avvikskompensasjonsmekanismen overskrider den negative grensen.
Behandling: Sjekk bevegelsesretningen til avvikskompensasjonsmekanismen og om grensesignalkoblingen er korrekt.
ALM041 Avvikskompensasjon
Årsak: Advarsel ved avvikskompensasjon.
Behandling: Sjekk om innstillingen for avvikskompensasjonsnøyaktighet er for liten.
ALM042 Tilt på Y-aksen
Årsak: Inngangssignalet for tilt på Y-aksen er aktivt.
Behandling: Sjekk om Y1 og Y2 er parallelle og om nullpunktinnstillingen er korrekt.
Konklusjon
Oppsummert ligger nøkkelen til rask feilsøking av ET-seriens formalarmer i å mestre de grunnleggende trinnene for effektiv identifisering og løsning av vanlige feil. Ved å følge fremgangsmåtene beskrevet i denne artikkelen – for eksempel ved å sjekke kabelforbindelser, kalibrere systemparametre og utføre rutinemessig vedlikehold – vil du kunne minimere nedetid og sikre produksjonseffektiviteten.
For ytterligere hjelp eller mer detaljert teknisk informasjon, ta gjerne kontakt med vårt tekniske støtteteam, JUGAO CNC MACHINE. Vi står klare til å gi deg faglig rådgivning og tilleggsressurser som hjelper deg til å bruke våre produkter mer effektivt. Du kan også konsultere våre andre tekniske dokumenter for mer informasjon om vedlikehold av bøyemaskiner og optimalisering av ytelse.

