















































Vanlige problemer i sveiserobotens sveiseprosess
Sveiseeffekten til roboter påvirkes av mange faktorer. Mange kunder støter på ulike problemer før de blir dyktige i bruken av sveiseroboter. Disse problemene skyldes vanligvis feilaktig bruk eller upassende robotinnstillinger, og kan løses ved hjelp av passende justeringer. Nedenfor gjennomgår vi noen vanlige problemer som oppstår under bruk av sveiseroboter, samt deres løsninger.
I. Mislykket lysbuestart under sveising
1. Lysbue ikke startet ennå

Årsak: Programmet mangler en tilsvarende kommando for lysbuestart før kommandoen for lysbueslutt utføres.
Løsning: Sjekk om en ekstra bueavslutningskommando eller en ekstra buestartkommando er blitt lagt til.
2. Buestart mislyktes, signaldeteksjonsfeil

Løsningsmetode:
1) Sjekk innstillingen for sveiseavbruddstid på parameter siden. Generelt er en tidsinnstilling på 5000 ms passende.
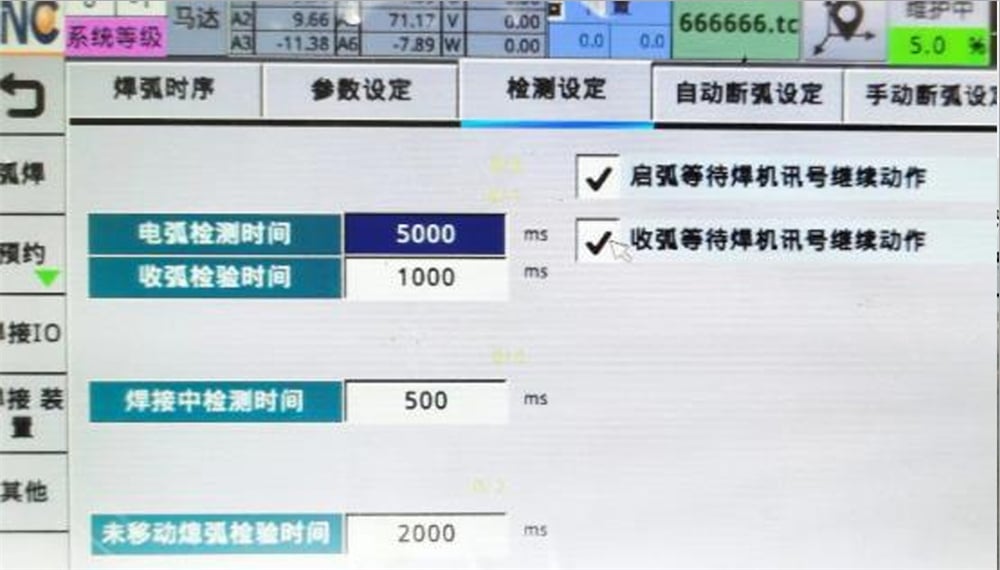
2) Sjekk om sveiseapparatets signal overføres vellykket til systemet.
3) Sjekk om arbeidsstykket er jordet.
3. Buedannelse og trådbrudd
Årsaker:
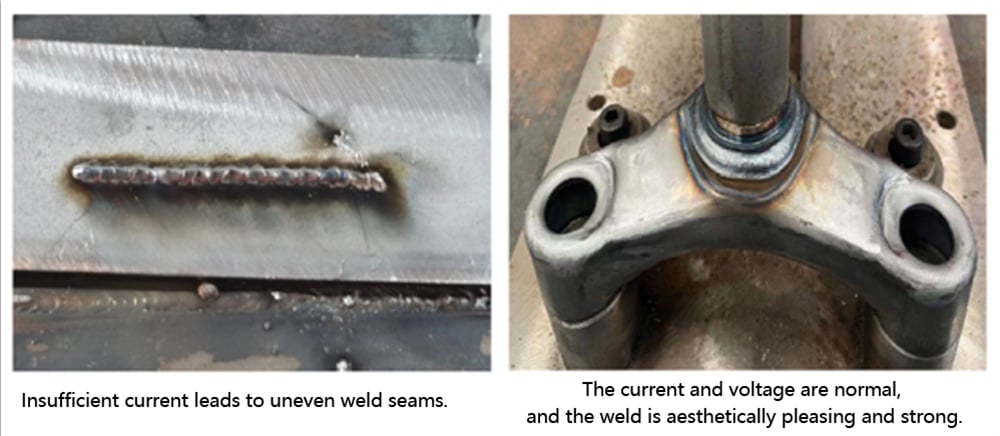
1) Strøm- og spenningsmismatch
Løsning: Vi må sette inn passende strøm og spenning i henhold til den faktiske tykkelsen på arbeidsstykket og sveiseapparatet.
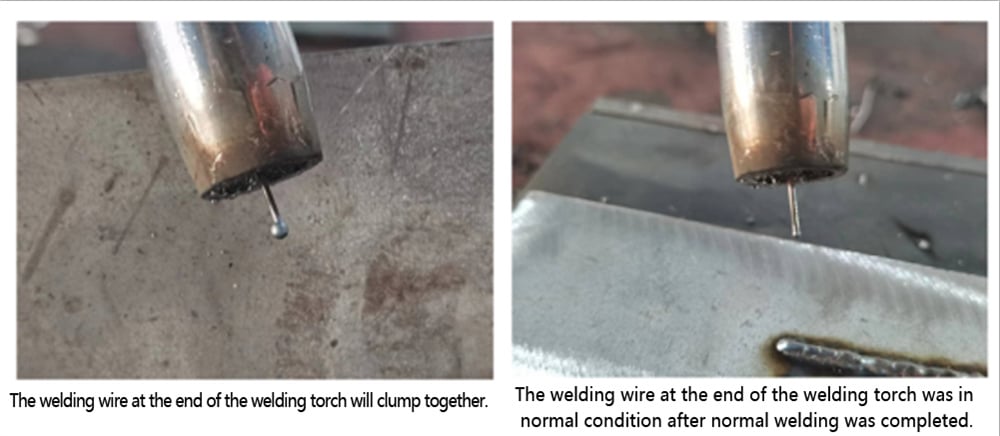
2) Sveisevirens lengde er for lang.
Løsning: Generelt bør utvidelseslengden på sveiseviren være 10–15 ganger diameteren på sveiseviren. Velg en passende sveisevirlengde i henhold til sveisevirens diameter.
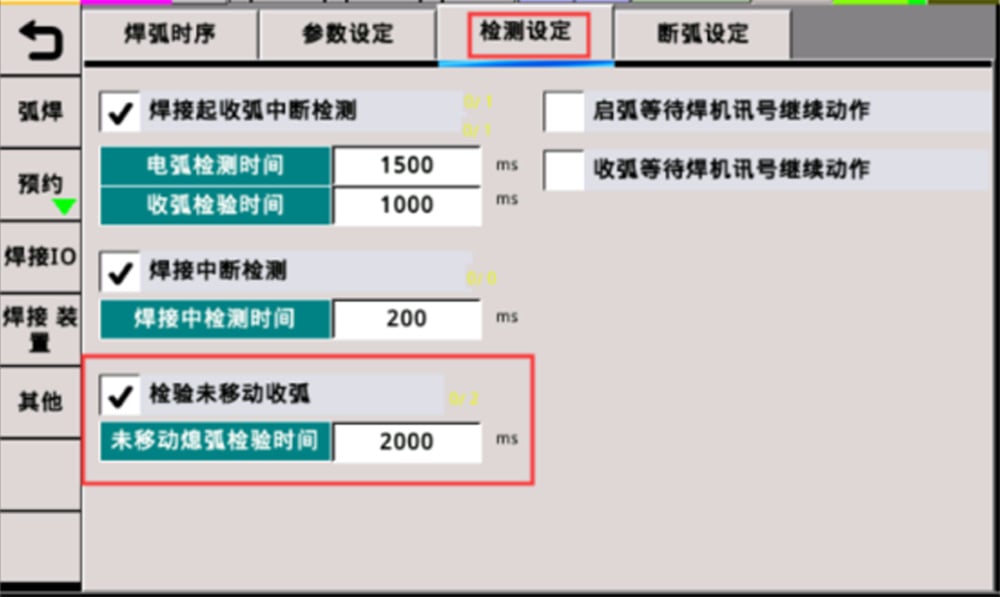
4. Automatisk bueutslukning skjer etter bueinnstilling.

Feilsøking: Sjekk om det er et problem med parameterens tidsinnstilling og sjekk om sveisebrenneren har beveget seg.
II. Bueavbrudd oppstår under sveising.
Årsaker:
1. Sveisesnoren ber ikke arbeidsstykket, noe som utløser en alarm for bueavbrudd.
Løsning: Juster på nytt posisjonen til sveisesnoren og arbeidsstykket for å sikre full kontakt under sveising. (Snoren bør imidlertid ikke være for nær arbeidsstykket, da dette kan føre til gjennombrenning.)
2. En feilaktig sveivebane fører til at sveisebrenneren kolliderer og automatisk heves.
Løsning: Angi på nytt sveivebanen.
3. Dårlig kontakt mellom positiv og negativ elektrode på sveiseapparatet.
Løsning: Sjekk tilkoblingen av den positive og negative elektroden.
III. Årsaker til feilaktig bueavslutning etter sveising:
1. Feil ved bueavslutning på grunn av feil i signaldeteksjon.
Årsak: Sveiseautomaten mottok ikke et signal fra roboten, noe som førte til at robotens bueavslutning mislyktes.
Felsøking:
(1) Sjekk om innstillingsparameterne er rimelige.
(2) Sjekk IO-signaler og om I-punkt-signal for bueavslutning er unormalt. Hvis I-punkt-signalet alltid viser AV...
(3) Sjekk om det er kortslutning i kretsen og om jordledningen er tilkoblet unormalt.
2. Ingen bueavslutningskommando ble angitt etter buestart.

Årsak: Når denne alarmen vises på undervisningspanelet, sjekk om bueavslutningskommandoen ble glemt.
Løsning: Legg til en bueavslutningskommando etter buestartkommandoen i programmet.
Denne artikkelen beskriver hovedsakelig problemer knyttet til buestart, bueavslutning og bueavbrytelse under sveising med sveiseroboter. Brukere kan følge de angitte løsningene hvis de støter på slike problemer. Hvis problemet ikke lar seg løse, vennligst kontakt JUGAO-teknisk personell.
Sveiseroboten er en automatisk robot som integrerer flere sveifunksjoner, som gassbeskyttet sveising, argonbuesveising, plasma-skjæring og lasersveising. Den har høy fleksibilitet, god tilpasningsevne, høy sveieffektivitet og stabil sveikvalitet, og kan brukes bredt i ulike felt, som maskinproduksjon, bilproduksjon, presisjonselektronikk og kullgruvedrift.

