















































Შედუღების რობოტების მუშაობის პროცესში გავრცელებული პრობლემები
Რობოტების დაკავშირების ეფექტი მოიცავს რამდენიმე ფაქტორს. ბევრი მომხმარებელი საკვებავი რობოტების გამოყენებაში მოხერხებულების მიღწევამდე სხვადასხვა პრობლემას აწყდება. ეს პრობლემები ჩვეულებრივ გამოწვეულია არასწორი ექსპლუატაციით ან არ შესატყოვანებელი რობოტის პარამეტრებით და შესაძლებელია მათ შესაბამისი რეგულირებით გადაჭრა. ქვემოთ განვიხილავთ საკვებავი რობოტების გამოყენების დროს ხშირად მოხდებადი ზოგიერთ პრობლემას და მათ გადაჭრის გზებს.
I. დაკავშირების დროს არ წარმოიქმნება ელექტრული რელსი
1. ელექტრული რელსი ჯერ არ წარმოიქმნა

Მიზეზი: პროგრამაში არ არსებობს შესაბამისი ელექტრული რელსის ჩართვის ბრძანება ელექტრული რელსის გამორთვის ბრძანების შესრულებამდე.
Ამოხსნა: შეამოწმეთ, დაემატა თუ არა დამატებითი არკის დასრულების ბრძანება ან დამატებითი არკის დაწყების ბრძანება.
2. არკის დაწყება ვერ მოხერხდა, სიგნალის აღმოჩენის შეცდომა

Შეცდომების აღმოფხვრის მეთოდი:
1) შეამოწმეთ პარამეტრების გვერდზე დაყენებული სველი შეწყვეტის დრო. საერთოდ, 5000 მს-ის დროის დაყენება შეიძლება მიიჩნევოს შესაფერებლად.
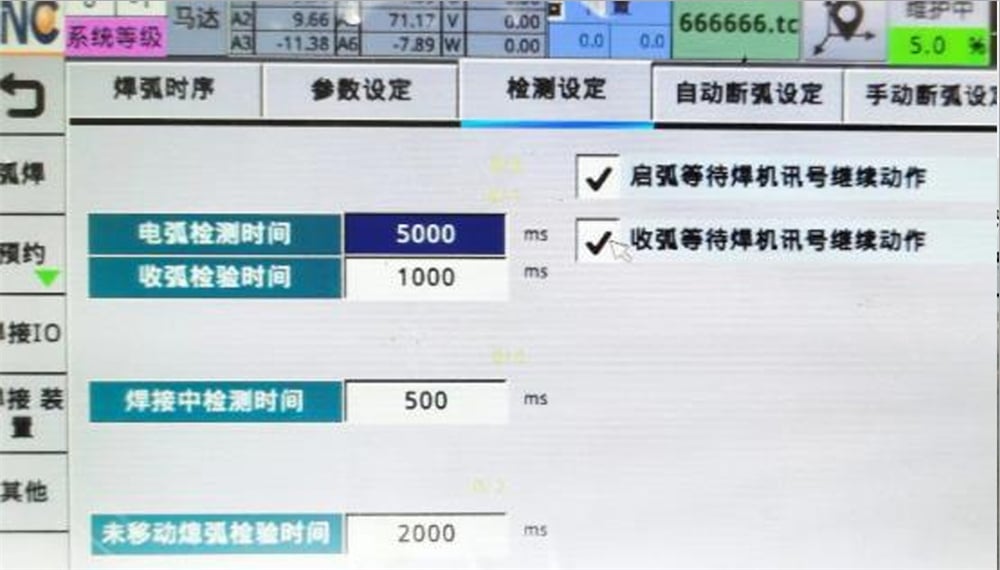
2) შეამოწმეთ, არ არის თუ არა სველი მანქანის სიგნალი წარმატებით გადაცემული სისტემაში.
3) შეამოწმეთ, დაკავშირებულია თუ არა სამუშაო ნიმუში მიწაზე.
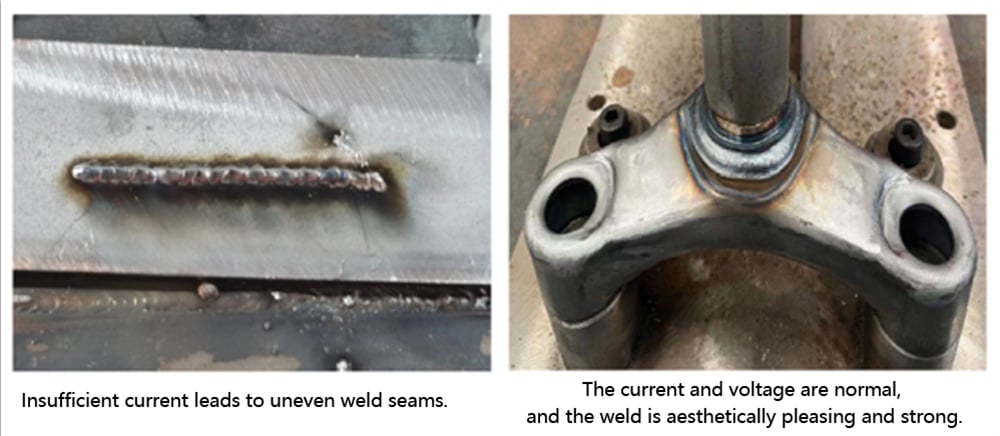
3. არკირება და სასველო სადენის გაწყეტა
Მიზეზები:
1) დენისა და ძაბვის შეუსაბამობა
Ამოხსნა: ჩვენ უნდა დავაყენოთ შესაფერებელი დენი და ძაბვა სამუშაო ნიმუშის ფაქტობრივი სისქის და სველი მანქანის მიხედვით.
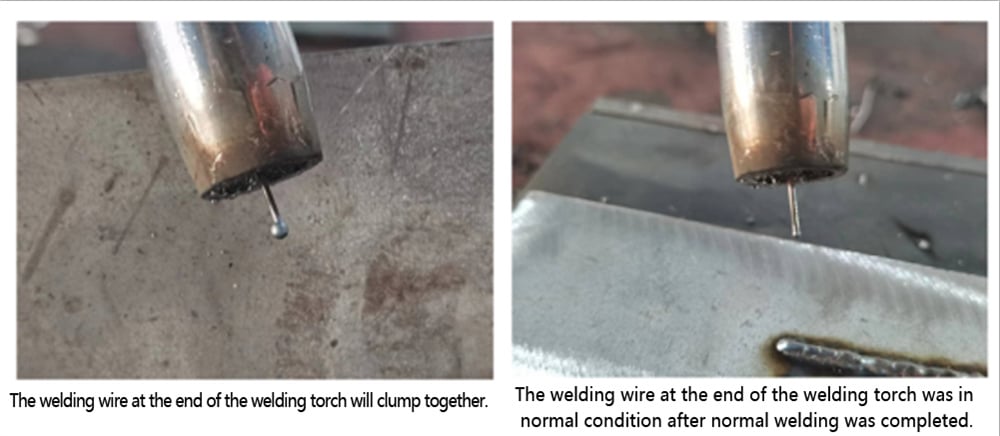
2) სასველო სადენის სიგრძე ძალიან გრძელია.
Ამოხსნა: საერთოდ, საკვები სადგურის გაგრძელების სიგრძე უნდა იყოს საკვები სადგურის დიამეტრის 10–15-ჯერ.
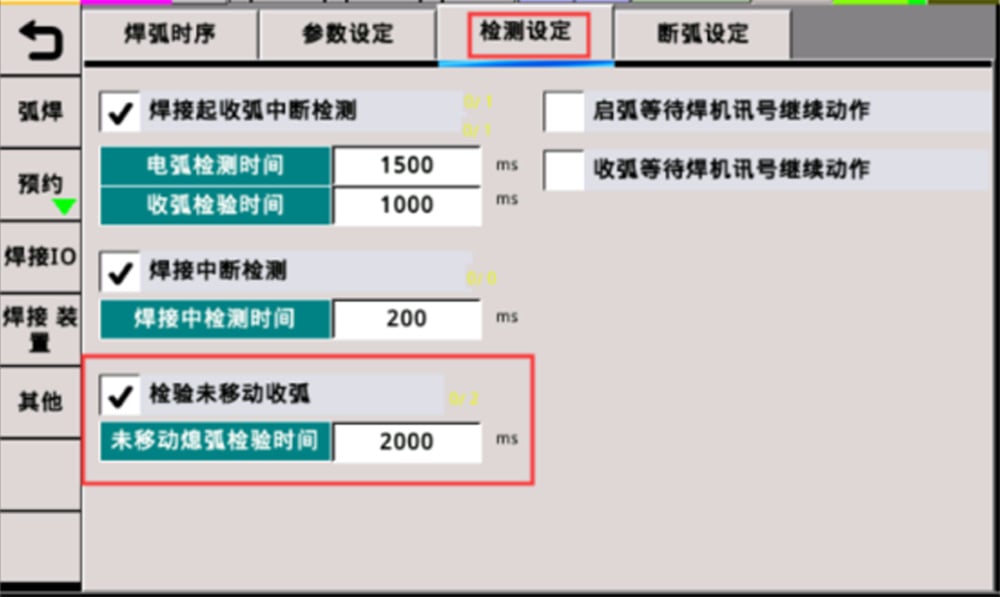
4. არქის გაჩერება ხდება ავტომატურად არქის წარმოქმნის შემდეგ.

Შეცდომების აღმოფხვრა: შეამოწმეთ, არსებობს თუ არა პარამეტრების დროის დაყენებასთან დაკავშირებული პრობლემა და შეამოწმეთ, არ არის თუ არა საკვები სადგური გადაადგილებული.
II. საკვების დროს არქის შეწყვეტა ხდება.
Მიზეზები:
1. საკვები სადგური არ ეხება სამუშაო ნაკრებს, რაც იწვევს არქის შეწყვეტის შეტყობინებას.
Ამოხსნა: ხელახლა დააყენეთ საკვები სადგურისა და სამუშაო ნაკრების მდებარეობა ისე, რომ საკვების დროს მათ სრული კონტაქტი ჰქონდეს. (თუმცა, სადგური არ უნდა იყოს ძალიან მიახლოებული სამუშაო ნაკრებს, რადგან ეს შეიძლება გამოიწვიოს გახვრელება.)
2. არასწორი საკვების ტრაექტორია იწვევს საკვები სადგურის შეჯახებას და ავტომატურად აწევას.
Ამოხსნა: ხელახლა დააყენეთ საკვების ტრაექტორია.
3. საკვები მანქანის დადებითი და უარყოფითი ელექტროდებს შორის ცუდი კონტაქტი.
Ამოხსნა: შეამოწმეთ დადებითი და უარყოფითი ელექტროდების გათავსება.
III. რეჟიმის დასრულების შეცდომის მიზეზები სველის შემდეგ:
1. სიგნალის აღმოჩენის შეცდომის გამო რეჟიმის დასრულების შეცდომა.
Მიზეზი: სველის მანქანა არ მიიღო რობოტის სიგნალი, რის გამოც რობოტის რეჟიმის დასრულება ვერ მოხერხდა.
Განადგურება:
(1) შეამოწმეთ, არის თუ არა პარამეტრების დაყენება გამართლებული.
(2) შეამოწმეთ შეყვანის/გამოტანის (I/O) სიგნალები და იმ სიგნალის ნორმალურობა, რომელიც აღნიშნავს რეჟიმის დასრულების I-წერტილს. თუ I-წერტილის სიგნალი ყოველთვის ON-ის მდგომარეობაშია...
(3) შეამოწმეთ, არსებობს თუ არა წრედში კოროტული შეერთება და არის თუ არა მიწასთან შეერთება არასწორად გაკეთებული.
2. რეჟიმის დაწყების შემდეგ არ იყო დაყენებული რეჟიმის დასრულების ბრძანება.

Მიზეზი: როდესაც ეს შეცდომა ჩნდება სწავლების პანელზე, შეამოწმეთ, არ გამოვიტოვეთ თუ არა რეჟიმის დასრულების ბრძანება.
Გადაწყვეტა: დაამატეთ რეჟიმის დასრულების ბრძანება პროგრამაში რეჟიმის დაწყების ბრძანების შემდეგ.
Ეს სტატია ძირითადად მოიცავს საკითხებს, რომლებაც ასოცირდება საკვების რობოტების შეერთების პროცესში არჩის წარმოქმნას, არჩის გამორთვას და არჩის შეწყვეტას. მომხმარებლებს შეუძლიათ ამ პრობლემების წარმოშობის შემთხვევაში ამოხსნების მიმართვა. თუ პრობლემა არ არის გადაჭრილი, გთხოვთ, მიმართოთ JUGAO-ს ტექნიკურ პერსონალს.
Საკვების რობოტი არის ავტომატიზებული რობოტი, რომელიც იკავშირებს რამდენიმე საკვების ფუნქციას, მათ შორის აირით დაცული საკვები, არგონის არჩის საკვები, პლაზმის კვეთა და ლაზერული საკვები. მას ახასიათებს მაღალი მოქნილობა, ძლიერი ადაპტაციურობა, მაღალი საკვების ეფექტურობა და სტაბილური საკვების ხარისხი, ხოლო მისი გამოყენება შეიძლება სხვადასხვა სფეროში, მაგალითად, მექანიკური წარმოება, ავტომობილების წარმოება, სიზუსტის ელექტრონიკა და ნახშირის მოპოვება.

