















































Ռոբոտային կապարատարման գործընթացում հաճախ հանդիպող խնդիրներ
Ռոբոտների կարծրացման արդյունքը կախված է շատ գործոններից: Ռոբոտացված կարծրացման օգտագործման վարպետություն ձեռք բերելուց առաջ շատ հաճախորդներ հանդիպում են տարբեր խնդիրների: Այս խնդիրները սովորաբար առաջանում են սխալ շահագործման կամ անհարմար ռոբոտի կարգավորումների պատճառով և կարող են լուծվել համապատասխան ճշգրտումներով: Ստորև մենք կդիտարկենք կարծրացման ռոբոտների օգտագործման ընթացքում հաճախ հանդիպող որոշ խնդիրներ և դրանց լուծումները:
I. Կարծրացման ընթացքում աղեղի չվառվելը
1. Աղեղը դեռ չի վառվել

Պատճառ՝ Ծրագրում բացակայում է համապատասխան աղեղի վառման հրահանգը աղեղի մարման հրահանգի կատարումից առաջ:
Լուծում՝ Ստուգեք, արդյոք ավելացվել է լրացուցիչ աղեղի ավարտման հրահանգ կամ լրացուցիչ աղեղի սկզբնավորման հրահանգ:
2. Աղեղի սկզբնավորումը ձախողվել է, սիգնալի հայտնաբերման սխալ

Բացառման մեթոդ՝
1) Ստուգեք պարամետրերի էջում կառուցված կարճ կանգի ժամանակի սահմանափակումը: Ընդհանուր առմամբ՝ 5000 մվ ժամանակի սահմանափակումը համապատասխան է:
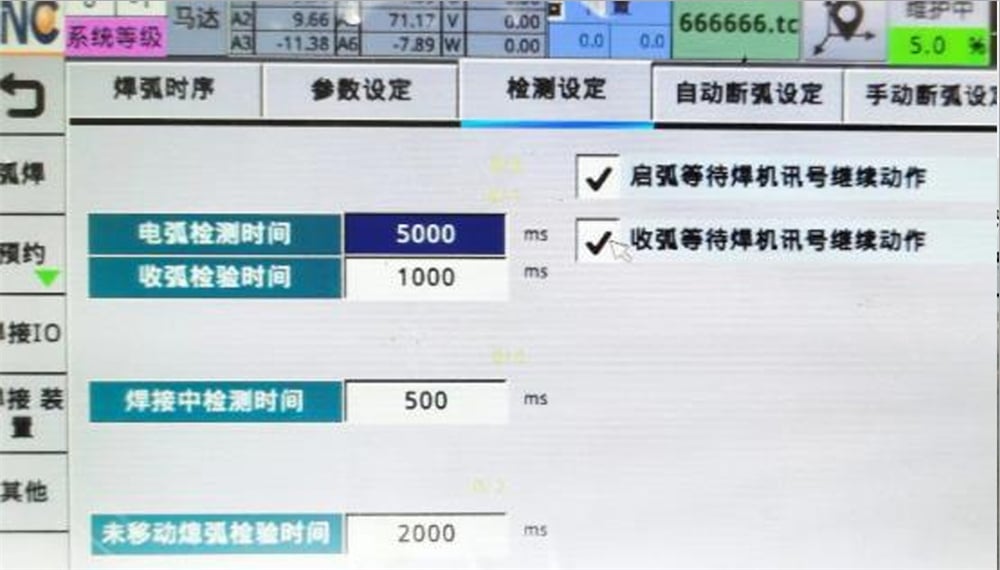
2) Ստուգեք, արդյոք եռակցման մեքենայի սիգնալը հաջողությամբ է փոխանցվում համակարգին:
3) Ստուգեք, արդյոք մշակվող մասը հողավորված է:
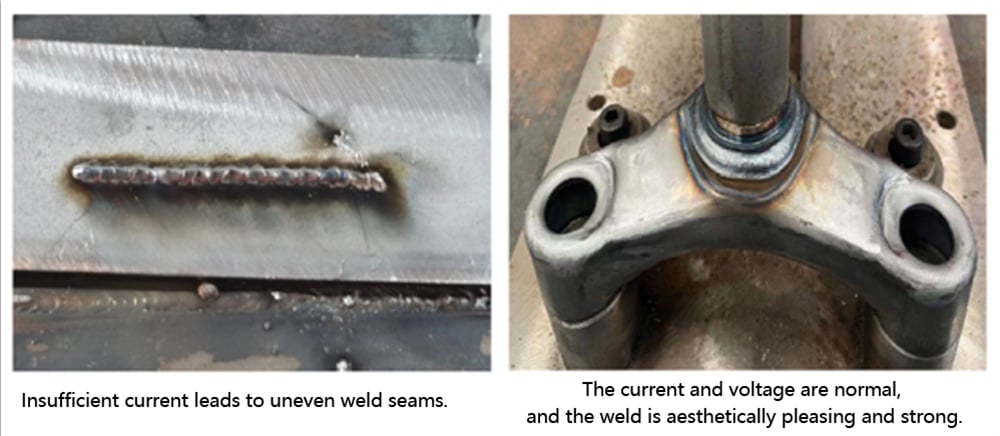
3. Աղեղային երևույթ և լարի կտրվելը
Դուրս գալու պատճառներ։
1) Հոսանքի և լարման անհամապատասխանություն
Լուծում՝ Մենք պետք է համապատասխան հոսանք և լարում սահմանենք՝ հիմնվելով մշակվող մասի իրական հաստության և եռակցման մեքենայի վրա:
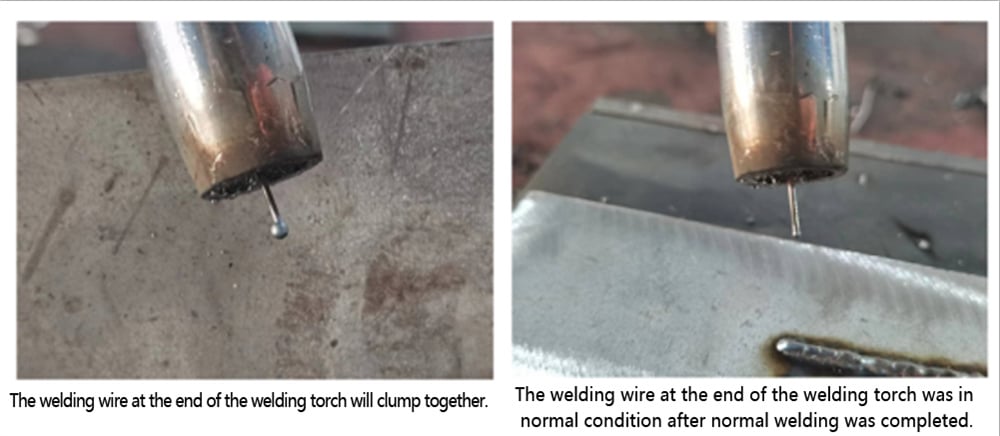
2) Եռակցման լարի երկարությունը չափազանց մեծ է:
Լուծում՝ Ընդհանուր առմամբ՝ եռակցման լարի երկարացման երկարությունը պետք է լինի եռակցման լարի տրամագծի 10–15 անգամ: Ըստ եռակցման լարի տրամագծի ընտրեք համապատասխան եռակցման լարի երկարություն:
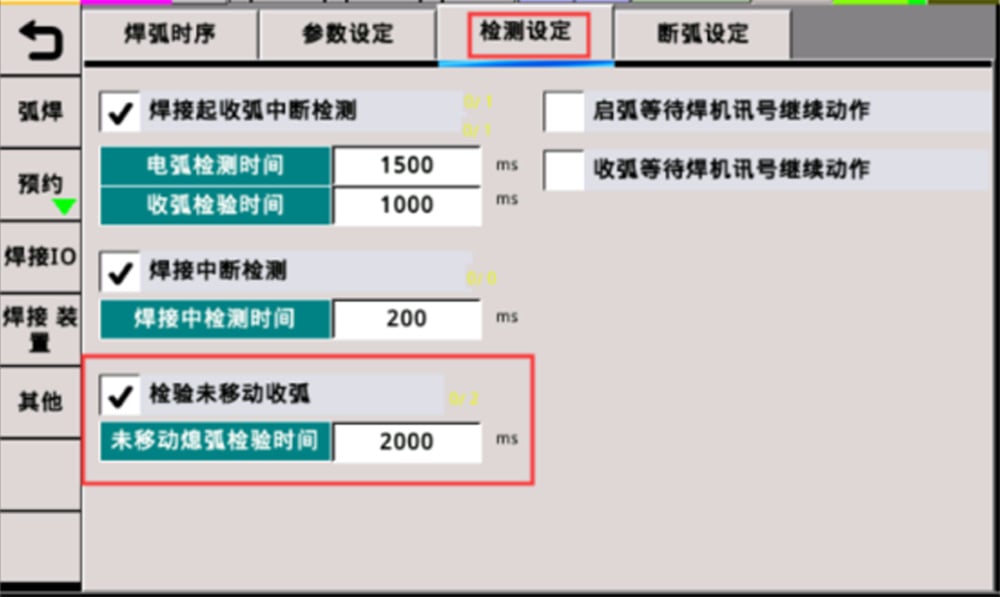
4. Ավտոմատացված աղեղի մարումը տեղի է ունենում աղեղի վառման հետևանքով:

Խնդրի լուծում. Ստուգեք՝ արդյոք պարամետրի ժամանակային սահմանադրումը խնդիր ունի, և ստուգեք՝ արդյոք եռակցման փողը տեղաշարժվել է:
II. Եռակցման ընթացքում աղեղի ընդհատում է տեղի ունենում:
Դուրս գալու պատճառներ։
1. Եռակցման լարը չի շփվում մշակվող մասի հետ, ինչը առաջացնում է աղեղի ընդհատման զգուշացում:
Լուծում. Կրկին ճշգրտեք եռակցման լարի և մշակվող մասի դիրքը՝ ապահովելու համար եռակցման ընթացքում լրիվ շփումը: (Սակայն լարը չպետք է չափից շատ մոտ լինի մշակվող մասին, քանի որ դա կարող է առաջացնել անցնելու երևույթ):
2. Սխալ եռակցման ճանապարհի պատճառով եռակցման փողը բախվում է և ավտոմատաբար բարձրանում է:
Լուծում. Վերակարգավորեք եռակցման ճանապարհը:
3. Եռակցման սարքի դրական և բացասական էլեկտրոդների միջև վատ շփում:
Լուծում. Ստուգեք դրական և բացասական էլեկտրոդների միացման լարերը:
III. Եռակցման ավարտից հետո աղեղի մարման ձախողման պատճառները.
1. Շղթայի խզման ձախողում սիգնալի հայտնաբերման սխալի պատճառով:
Պատճառ՝ Եռակցման սարքը չի ստացել սիգնալ ռոբոտից, ինչը հանգեցրել է ռոբոտի շղթայի խզման ձախողմանը:
Լուծում խնդիրներին։
(1) Ստուգեք՝ կարգավորման պարամետրերը համապատասխանում են արդյոք պահանջներին:
(2) Ստուգեք մուտք-ելքի (I/O) սիգնալները և այն, որ շղթայի խզման I-կետի սիգնալը արդյոք անորմալ է: Եթե I-կետի սիգնալը միշտ ցույց է տալիս «ՄԻԱՑՎԱԾ»...
(3) Ստուգեք՝ շղթայում արդյոք կա կարճ միացում, և հողաշարժը արդյոք ճիշտ է միացված:
2. Շղթայի սկզբնավորումից հետո չի տրվել շղթայի խզման հրահանգ:

Պատճառ՝ Երբ սա հայտնվում է ուսուցման պանելի վրա, ստուգեք՝ մոռացվել է արդյոք շղթայի խզման հրահանգը:
Լուծում՝ Ծրագրում ավելացրեք շղթայի խզման հրահանգ շղթայի սկզբնավորման հրահանգից հետո:
Այս հոդվածը հիմնականում ներկայացնում է եռակցման ռոբոտների եռակցման գործընթացի ընթացքում շղթայի սկզբնավորման, շղթայի խզման և շղթայի ընդհատման հետ կապված խնդիրները: Եթե օգտագործողները հանդիպում են նման խնդիրների, կարող են ծանոթանալ առաջարկված լուծումների հետ: Եթե խնդիրը չի լուծվում, խնդրում ենք դիմել JUGAO-ի տեխնիկական անձնակազմին:
Կառուցվածքային համակարգչային ռոբոտը ավտոմատացված ռոբոտ է, որը միավորում է գազային պաշտպանված եռակցում, արգոնային աղեղային եռակցում, պլազմային կտրում և լազերային եռակցում նման եռակցման բազմաթիվ ֆունկցիաներ: Այն տարբերվում է բարձր ճկունությամբ, ուժեղ հարմարվողականությամբ, բարձր եռակցման արդյունավետությամբ և կայուն եռակցման որակով և կարող է լայն կիրառում ունենալ տարբեր ոլորտներում, օրինակ՝ մեքենաշինության, ավտոմոբիլաշինության, ճշգրիտ էլեկտրոնիկայի և ածուխի արդյունահանման ոլորտներում:

