















































راهنمای محاسبه توالی خمکاری ESA S530: اصول، عملکرد و کاربرد
فهرست مطالب
• مقدمه
• محاسبه خودکار توالی خم (ویژگی اختیابی)
◦ رابط محاسبه
◦ نتایج بهینهسازی
◦ تابع شبیهسازی
◦ تنظیمات یاتاقان/نگهدارنده
• محاسبه دستی توالی خم (ویژگی اختیابی)
◦ نتایج فرآیند بهینهسازی
◦ عملیات شبیهسازی
◦ پیکربندی یاتاقان/نگهدارنده
◦ تغییر ترتیب خم کردن
• مراحل عملیات خم کردن جعبه
• سؤالات متداول (FAQ)
◦ دستگاه ESA S530 چگونه فرآیند خم کردن را بهبود میبخشد؟
◦ آیا میتوانم به صورت دستی ترتیب خم کردن را در دستگاه ESA S530 تغییر دهم؟
◦ در صورت بروز خطا در هنگام محاسبه ترتیب خم کردن توسط دستگاه ESA S530 چه باید کرد؟
• نتیجهگیری
معرفی
در حوزه ساخت فلزات، خمکاری دقیق پیوند اصلی در تضمین کیفیت قطعه کار است و عملکرد محاسبه ترتیب خمکاری دستگاه ESA S530 دقیقاً فناوری کلیدی برای دستیابی به این هدف میباشد. به عنوان یک ویژگی اساسی سیستم ESA S530، این قابلیت به صورت هوشمند ترتیب خمکاری ورقهای فلزی را بهینه میسازد، خطاهای عملیاتی و ضایعات مواد را کاهش میدهد و در عین حال اطمینان حاکم است که قطعات کاملاً مطابق با مشخصات طراحی باشند. چه هدف بهبود کارایی تولید باشد و چه حفظ کیفیت پردازش پایدار، این قابلیت نقشی جایگزینناپذیر ایفا میکند. این مقاله به تحلیل کامل منطق کارکرد، مزایای اصلی و روشهای عملیاتی محاسبه ترتیب خمکاری ESA S530 میپردازد و راهنمایی عملی برای تازهکاران جهت شروع به کار و برای اپراتورهای حرفهای جهت بهینهسازی فرآیندها ارائه میدهد تا به بهبود سطح کلی عملیات ماشینکاری فلزات کمک کند.
محاسبه خودکار ترتیب خمکاری (ویژگی اختیاری)
مسیر فعالسازی محاسبه خودکار توالی خم کردن ساده است: فرآیند را از رابط ترسیم قطعه کار شروع کنید و دکمه [محاسبه] را فشار دهید تا وارد رابط عملیات شوید. این حالت، بهینهسازی مستقل توالی خم را از طریق فناوری کنترل عددی محقق میسازد و در عین حال فضای هماهنگی با حالت دستی را نیز حفظ میکند تا بتواند به نیازهای سناریوهای مختلف تولید پاسخ دهد.
رابط محاسبه
رابط محاسبه، «مرکز برنامهریزی» قبل از خم کردن است. این رابط نه تنها وضعیت شبیهسازی شده قبل از خم کارگاه را بهصورت زنده نمایش میدهد، بلکه بهوضوح رابطه موقعیتی قطعات اصلی دستگاه خمکاری – شامل سنبه، ماتریس و توقف را نشان میدهد و به اپراتورها کمک میکند تا پیش از انجام عملیات، موقعیت نسبی بین تجهیزات و قطعه کار را درک کنند. در سمت راست رابط، سه پنجره فرعی وجود دارد که بهصورت پویا به ترتیب زاویه چرخش و تعداد دفعات برگردان قطعه کار را نمایش میدهند. همچنین این رابط دارای قابلیت «بازیابی راهحل کامل» است که میتواند تمام مسیرهای بالقوه خمکاری را پیمایش کند و پشتیبانی کامل از دادهها را برای بهینهسازی مرحله بعدی فراهم کند.
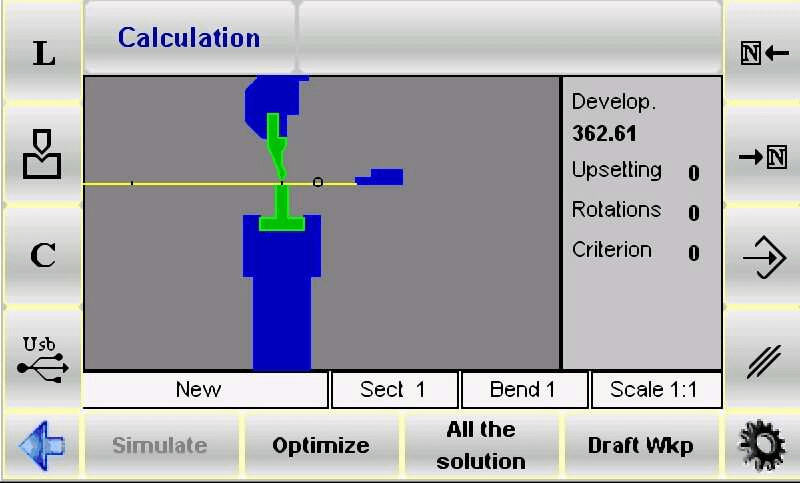
علاوه بر این، سیستم از طریق منطق کنترل عددی، ایمنی و کارایی پردازش را تضمین میکند: همواره سطح بزرگتر ورق فلزی را در محدوده قابل کنترل اپراتور نگه میدارد تا از خطرات عملیاتی کاسته شود. اپراتورها همچنین میتوانند استانداردهای محاسبه را با توجه به نیازهای تولید تنظیم کرده و بهصورت انعطافپذیری بین حالتهای خودکار/دستی جابجا شوند تا تطبیقپذیری فرآیند بیشتر بهبود یابد.
منطق هماهنگی بین حالتهای خودکار و دستی
محاسبه توالی خمکاری در دستگاه ESA S530 بهصورت تکحالته انجام نمیشود، بلکه از طریق هماهنگی دو حالت "خودکار + دستی" به پردازش انعطافپذیر دست مییابد:
• حالت خودکار: با تکیه بر الگوریتمهای کنترل عددی، سیستم بهصورت مستقل محاسبهٔ توالی بهینه خم را بدون دخالت دستی انجام میدهد. پس از فشار دادن کلید [بهینهسازی]، سیستم بر اساس پارامترهای قطعه کار (مانند جنس، ضخامت و زاویه خم) طرحی با بالاترین کارایی و کمترین خطای ممکن را انتخاب میکند.
• حالت دستی: اپراتورها میتوانند بخشی یا تمام مراحل خم را بهصورت مستقل تعریف کرده و تنظیمات دقیق را از طریق کلیدهای عملکرد اختصاصی انجام دهند: کلید [خم] برای قفل کردن عمل خم انتخابی استفاده میشود و کلید [چرخش] امکان کنترل زاویه چرخش قطعه کار را فراهم میکند؛ پس از تکمیل تنظیمات سفارشی، با فشار دادن کلید [بهینهسازی]، سیستم پارامترهای تعیینشده دستی را در محاسبه خودروانه ادغام کرده و طرحی را تولید میکند که هم «قصد عملیاتی» و هم «بهینهسازی فرآیند» را در نظر میگیرد.
نتایج بهینهسازی
منطق بازخورد نتایج بهینهسازی واضح است و به اپراتورها کمک میکند تا سریعاً قضاوت کرده و تصمیم بگیرند:
• هنگامی که روش امکانپذیر نیست: سیستم یک پیام «راهحلی وجود ندارد» نمایش میدهد و اپراتور را به بررسی مشکلات (مانند زوایای خم متضاد، تداخل قطعات و غیره) یا تغییر ترتیب خمیدن راهنمایی میکند. در صورت وجود خطر برخورد قطعه کار، منطقه تصادف بهصورت شهودی از طریق تغییر رنگ (مانند هایلایت قرمز) علامتگذاری میشود.
• اجازه انجام عملیات خاص: اگر برخورد تنها «تداخل غیرمخرب» باشد (مانند تماس موقتی که روی قطعه کار یا تجهیزات تأثیر نمیگذارد)، اپراتور میتواند انتخاب کند که به این هشدار توجه نکند و فرآیند خمیدن را ادامه دهد.
• هنگامی که روش امکانپذیر است: سیستم عبارت «راهحل یافت شد» را نمایش میدهد و چهار گزینه عملیاتی اصلی ارائه میکند:
الف. [توقف]: فرآیند بهینهسازی را متوقف کنید تا تنظیم دقیق پارامترهای طرح فعلی امکانپذیر شود (مانند تنظیم زاویه خم، تغییر موقعیت تکیهگاه).
ب. [ادامه]: بهطور مداوم طرحهای بالقوه دیگر را بازیابی کنید تا زمانی که مسیر عملی دیگری وجود نداشته باشد. در صورت بررسی تمام احتمالات و عدم وجود طرح مناسب، در نهایت عبارت "راهحلی وجود ندارد" نمایش داده خواهد شد.
ج. [شبیهسازی]: شروع شبیهسازی توالی خمکاری. اپراتورها میتوانند با استفاده از کلید [ادامه] فرآیند را پیش ببرند یا با استفاده از کلید [توقف] شبیهسازی را قطع کنند تا فرآیند خمکاری را بهصورت زنده مشاهده کنند.
د. [تایید]: پارامترهای خمکاری محاسبهشده در حال حاضر (مانند زاویه، سرعت، موقعیت تکیهگاه) را در برنامه ذخیره کنید تا مستقیماً در فرآیند واقعی استفاده شوند.
تابع شبیهسازی
تابع شبیهسازی یک «پیوند پیشنمایش» است که دقت خمکاری را تضمین میکند و مراحل عملیاتی آن شهودی و کنترلپذیر هستند:
1. دکمه [شبیهسازی] را فشار دهید، و رابط وضعیت ورق تخت قطعه کار که باید خم شود را نمایش میدهد و موقعیت اولیه اولین خم را مشخص میکند.
2. ساختار پشتیبانی مناسب را از طریق دکمه [اتکا/پشتیبانی] انتخاب کنید. لازم است اطمینان حاصل کنید که در محل پشتیبانی هیچ خطر برخوردی وجود ندارد و این محل در محدوده حرکت محورهای تجهیزات (مانند حرکت محور X و محور R) قرار دارد.
3. دکمه [ادامه] را فشار دهید، سیستم عمل خم اول را انجام میدهد و شکل قطعه کار پس از خم را نمایش میدهد؛ برای خمهای بعدی باید این مرحله را تکرار کنید تا فرآیند به تدریج پیش برود.
4. اگر نیاز به توقف برای مشاهده جزئیات دارید، میتوانید دکمه [توقف] را فشار دهید؛ اگر نیاز به بازگشت و تنظیم مجدد دارید (مانند اصلاح موقعیت پشتیبانی مرحله قبلی)، میتوانید از طریق دکمه [مرحله قبلی] به مرحله قبلی بازگردید.
5. دکمه [ادامه] را تا زمانی که شبیهسازی تمام مراحل خم شدن به پایان برسد، به طور مکرر فشار دهید. در این زمان دکمه [شبیهسازی] دوباره نمایش داده میشود که نشاندهنده پایان فرآیند شبیهسازی است.
تنظیم یاتاقان/نگهدارنده
تنظیم یاتاقان/نگهدارنده کلید اصلی برای جلوگیری از تغییر شکل قطعه کار و اطمینان از پایداری خم شدن است. این عملیات باید مراحل زیر را دنبال کند:
1. دکمه [شبیهسازی] را فشار دهید، صفحه نمایش وضعیت قطعه کار تخت برای اولین بار خم شدن را نشان میدهد و وضعیت اولیه پردازش را مشخص میکند.
2. دکمه [یاتاقان/نگهدارنده] را فشار دهید تا نوع نگهدارنده تغییر کند - شما میتوانید گزینه "نگهدارنده اول"، "نگهدارنده دوم" یا "نگهدارنده قطعه کار" را انتخاب کنید. سیستم به طور خودکار امکانپذیری حرکت محلیاب را ارزیابی میکند: محلیاب تنها زمانی به موقعیت هدف نگهدارنده حرکت میکند که خطر برخورد وجود نداشته باشد و شرایط حدی تجهیزات رعایت شود.
3. برای مشاهده وضعیت قطعه کار پس از اولین خمکاری و تأیید اینکه آیا اثر تکیهگاه مطابق انتظار است، کلید [ادامه] را فشار دهید.
4. برای ورود به تنظیمات خمکاری دوم، به فشردن کلید [ادامه] ادامه دهید و نوع تکیهگاه را در صورت نیاز انتخاب کنید (حرکت لوکاتور همچنان باید دو شرط "عدم برخورد + رعایت محدودیتها" را برآورده کند).
5. در طول فرآیند، میتوانید در هر زمان کلید [توقف] را فشار دهید تا شبیهسازی متوقف شود، یا کلید [مرحله قبلی] را فشار دهید تا به مرحله قبل بازگردید و پارامترهای تکیهگاه را تنظیم کنید.
6. شبیهسازی را ادامه دهید تا زمانی که دوباره کلید [شبیهسازی] نمایش داده شود، که به معنای تکمیل اعتبارسنجی تمام فرآیند تنظیم تکیهگاه است.
توجه داشته باشید که این تابع در گوشه بالای سمت راست برنامه کنترل عددی قرار دارد و در کنار آیکون نوع خمکاری قرار گرفته است. سیستم بهصورت خودکار انحراف موقعیت محور X و محور R را اصلاح خواهد کرد؛ اگر برنامه فعلی از نوع "گرافیکی" باشد، کلید [Bearing/Support] در حالت کنترل عددی قابل استفاده نیست و باید تنظیم تکیهگاه از طریق تغییر به رابط شبیهسازی انجام شود.
محاسبه دستی توالی خمکاری (ویژگی اختیاری)
محاسبه دستی ترتیب خمکاری برای سناریوهایی که نیاز به تنظیمات شخصیسازی شده دارند مناسب است. مسیر راهاندازی همان مسیر حالت خودکار است: از رابط کاربری نقشه قطعه کار، دکمه [محاسبه] را فشار دهید تا وارد شوید. رابط، کل فرآیند خمکاری را به صورت دقیق شبیهسازی میکند، شامل نمایش بصری قسمتهای بالایی و پایینی دستگاه خمکاری، چکش، ماتریس، محلنما و قطعه کار قبل از خمکاری؛ سه پنل در سمت راست بهصورت پویا تعداد چرخشها و زوایای چرخش قطعه کار را در طول فرآیند محاسبه نمایش میدهند (برای دیاگرامهای خاص، لطفاً به توضیحات رابط در فصل "محاسبه خودکار ترتیب خمکاری" مراجعه کنید).
جستجوی دستی ترتیب خمکاری
هسته حالت جستجوی دستی، "هدایت دستی مسیر خمکاری" است و مراحل عملیات به شرح زیر است:
1. از کلیدهای جهتدار استفاده کنید


برای مرور تمام مراحل خمکاری و یافتن سطح هدف مورد نیاز برای تنظیم
2. برای اعمال قفل کردن اجباری عمل خمکاری، در سطح خم مورد نظر کلید [خم کردن] را فشار دهید؛ در صورت نیاز به لغو آن، دوباره کلید [خم کردن] را فشار دهید.
3. کلید [چرخش] را فشار دهید تا زاویه چرخش قطعه کار تنظیم شود و اطمینان حاصل شود که خم بعدی با موقعیت مرحله فعلی مطابقت داشته باشد.
4. پس از تکمیل تنظیمات اجباری تمام خمهای مورد نیاز، کلید [بهینهسازی] را فشار دهید. سیستم بر اساس دنباله مشخصشده به صورت دستی و همراه با محدودیتهای فرآیند (مانند عدم برخورد، محدوده حرکت محور) طرح نهایی را محاسبه خواهد کرد.
نتایج فرآیند بهینهسازی
بازخورد نتایج بهینهسازی در حالت دستی با حالت خودکار یکسان است، اما بیشتر بر «سازگاری تنظیمات دستی» تمرکز دارد.
• اگر پیکربندی قطعه کار (مانند توالی خمزنی که به صورت دستی مشخص شده است) قابل پردازش نباشد، سیستم یک پیام «راهحل اجباری» نمایش میدهد. اپراتور باید از طریق تابع جستجوی دستی، مراحل مشکلدار (مانند زوایای خم در تضاد، موقعیتهای نادرست تکیهگاه) را مجدداً تنظیم کند.
• خطرات تصادف بالقوه اجزای ماشین با تغییر رنگ (مانند هشدار نارنجی) علامتگذاری میشوند تا به اپراتورها در تنظیم توالی یا اصلاح موقعیت تکیهگاهها کمک کند.
• اگر تصادف خطر آسیبی نداشته باشد (مانند تماس موقت لبه قطعه کار با قالب)، خمزنی میتواند اعمال شود؛ در صورتی که راهحلی امکانپذیر شناسایی شود، سیستم عبارت «راهحل یافت شد» را نمایش میدهد و اپراتور میتواند گزینه [توقف] را برای متوقف کردن بهینهسازی و انجام تنظیمات انتخاب کند، یا گزینه [پذیرش] را برای ادغام مقادیر محاسبهشده در برنامه انتخاب نماید.
عملیات شبیهسازی
فرآیند شبیهسازی حالت دستی مطابق با حالت خودکار است. تفاوت اصلی در این است که «شبیهسازی بر اساس دنبالهای که به صورت دستی مشخص شده است» انجام میشود:
1. برای مشاهده وضعیت ورق تخت که باید خم شود، دکمه [شبیهسازی] را فشار دهید (وضعیت اولیه با اولین مجموعه خم که به صورت دستی تنظیم شده است مطابقت دارد).
2. دکمه [نگهدارنده/پشتیبان] را فشار دهید تا نوع پشتیبان را انتخاب کنید و اطمینان حاصل کنید که هیچ برخوردی رخ نمیدهد و حرکت محورها در محدوده مجاز باشد.
3. دکمه [ادامه] را فشار دهید تا اولین خم انجام شود و این مرحله را برای خمهای بعدی تکرار کنید؛ میتوانید دکمه [توقف] را برای مکث یا دکمه [قبلی] را برای بازگشت و بررسی منطقی بودن دنباله تعیینشده به صورت دستی فشار دهید.
4. شبیهسازی را ادامه دهید تا دوباره دکمه [شبیهسازی] نمایش داده شود. پس از اطمینان از عدم وجود مشکل در کل فرآیند خمکاری، میتوان آن را برای پردازش واقعی استفاده کرد.
پیکربندی نگهدارنده/پشتیبان
پیکربندی یاتاقان/نگهدارنده در حالت دستی مراحل عملیاتی مشابهی با حالت خودکار دارد، اما باید توجه داشت که «نگهدارنده باید با توالی خمکاری تعیینشده بهصورت دستی سازگار شود»:
• حرکت محلیاب باید دو شرط «موقعیت خمکاری تنظیمشده بهصورت دستی» و «عدم برخورد» را برآورده کند تا از خرابی نگهدارنده ناشی از تنظیم مجدد توالی جلوگیری شود.
• در صورت نیاز به تغییر نوع نگهدارنده، باید این کار در رابط شبیهسازی انجام شود (تابع [یاتاقان/نگهدارنده] در برنامههای گرافیکی در حالت کنترل عددی پشتیبانی نمیشود) تا اطمینان حاصل شود که نگهدارنده با مراحل خمکاری سازگار است.
اصلاح توالی خمکاری
حتی پس از بهینهسازی توالی خمکاری، ماشین ESA S530 همچنان امکان تنظیمات انعطافپذیر را فراهم میکند تا نیازهای تغییرات موقت فرآیند را برآورده کند:
1. از کلیدهای جهتدار برای مرور تمام مراحل خمکاری و یافتن خم هدف مورد نیاز برای اصلاح استفاده کنید.
2. برای لغو عمل خم کردن، کلید [خم] را فشار دهید و دوباره ترتیب خم جدید را انتخاب کنید (یا زاویه چرخش را تنظیم کنید).
3. پس از تکمیل اصلاحات، میتوان شبیهسازی را دوباره آغاز کرد تا امکانپذیری توالی جدید تأیید شود و اطمینان حاصل گردد که فرآیند تنظیمشده دقیق و کارآمد است.
مراحل عملیات خم کردن جعبه
خم کردن جعبه یک سناریوی متداول در فرآوری فلزات است. محاسبه توالی خم دستگاه ESA S530 در این فرآیند باید از منطق "اجرا با برنامههای جداگانه" پیروی کند — چون فرآیند کنترل عددی نمیتواند مستقیماً جعبه خمشده را به صفحهای تخت باز کند، اپراتور باید دو برنامه خم مستقل ایجاد کند:
• برنامه 1: برای خم افقی استفاده میشود و زاویه و موقعیت خم جانبی دیواره جعبه را تعریف میکند.
• برنامه 2: برای خم عمودی استفاده میشود و پارامترهای خم طولی بالا/پایین جعبه را تعریف میکند.
با اجرای این دو برنامه به صورت متوالی، میتوان شکل دقیق جعبه را به دست آورد. علاوه بر این، در حین اجرای برنامههای چند بخشی، ESA S530 به طور خودکار اولویت را به پردازش بخشی با عرض ورق فلزی کمتر میدهد و بدین ترتیب از تغییر شکل ورق جلوگیری کرده و کارایی خم را بهبود میبخشد.
افزودن یک بخش
برای افزودن یک بخش پردازش جدید برای خم جعبه، مراحل زیر را دنبال کنید:
1. کلید عملکرد مشخصشده را فشار دهید (برای آیکون به ضمیمه پنل عملیات تجهیزات مراجعه کنید) تا منوی مدیریت بخش باز شود.

2. گزینه "تغییر بخش" را در منو انتخاب کنید. سیستم به طور خودکار یک بخش جدید ایجاد خواهد کرد و اپراتور میتواند پارامترهای خم (مانند زاویه، موقعیت تکیهگاه) این بخش را تنظیم کند.
حذف یک بخش
برای حذف یک بخش غیرضروری، فرآیند عملیاتی به شرح زیر است:
1. با استفاده از کلیدهای جهتدار به بخش مورد نظر بروید و شماره و پارامترهای بخش را تأیید کنید.
2. منوی مدیریت بخش را باز کنید و گزینه «لغو بخش» را انتخاب کنید.
3. سیستم بخش را حذف خواهد کرد و برنامه بهطور خودکار به مرحله «خمدهی اول بخش ۱» بازمیگردد تا پیوستگی فرآیند بعدی تضمین شود.
سوالات متداول (FAQ)
ESA S530 چگونه فرآیند خمکاری را بهبود میبخشد؟
ESA S530 فرآیند خمکاری را از طریق «محاسبه خودکار توالی خمکاری» بازسازی میکند: این سیستم نیاز به آزمایشهای دستی مکرر (مانند تنظیم چندباره توالی خمکاری در فرآیندهای سنتی) را حذف میکند، زمان راهاندازی تجهیزات را بهطور قابل توجهی کاهش میدهد؛ همزمان، سیستم بر اساس الگوریتمهای کنترل عددی، مسیر را بهینهسازی میکند، خطاهای عملیاتی را کاهش میدهد، کارایی و دقت کلی عملیات شکلدهی فلزات را افزایش میدهد و نرخ ضایعات مواد را پایین میآورد.
آیا میتوانم توالی خمکاری را بهصورت دستی در ESA S530 تغییر دهم؟
بله. دستگاه ESA S530 امکان تنظیم دستی ترتیب خم را پشتیبانی میکند. با توجه به نیازهای خاص تولید (مانند محدودیتهای شکل قطعات خاص، محدودیتهای موقت فرآیند تجهیزات)، اپراتورها میتوانند بخشی یا تمام مراحل خم را از طریق کلید [خم] و کلید [چرخش] سفارشی کنند و همزمان هم "انعطافپذیری فرآیند" و هم "دقت پردازش" را رعایت نمایند.
در صورت بروز خطا در محاسبه ترتیب خم دستگاه ESA S530 چه باید کرد؟
در صورت بروز خطای محاسبه، پیشنهاد میشود مراحل زیر برای عیبیابی رعایت گردد:
1. ابتدا پارامترهای ورودی را بررسی کنید: از صحت تنظیمات پایه مانند نوع ماده، ضخامت ورق و زاویه خم اطمینان حاصل کنید (خطاهای پارامتری از دلایل رایج شکستها هستند).
2. اگر پارامترها صحیح هستند، به راهنمای عملیاتی رسمی دستگاه ESA S530 مراجعه کرده و راهحل مربوط به کد خطا را در فصل "عیبیابی" پیدا کنید.
اگر مشکل همچنان حل نشده باشد، مستقیماً با تیم پشتیبانی فنی تماس بگیرید، تصویر پیام خطا و پارامترهای قطعه کار را ارائه دهید و کمک هدفمند دریافت کنید.
نتیجهگیری
تسلط بر اصول و عملیات محاسبه توالی خمکاری ESA S530 شرط اساسی دستیابی به دقت بالا و کارایی بالا در عملیات خمکاری فلزات است. منطق اصلی این فرآیند در اینجا قرار دارد: اطمینان از کیفیت شکلدهی قطعات پیچیده مانند جعبهها از طریق استراتژی «پردازش خمهای افقی/عمودی در برنامههای جداگانه» و «اجرای ابتدا بخشی با عرض ورق کمتر»؛ همزمان، هماهنگی حالتهای دوگانه خودکار و دستی به سیستم اجازه میدهد تا هم با تولید انبوه استاندارد سازگار شود و هم نیازهای پردازش شخصیسازی شده را برآورده کند.
برای بهرهگیری کامل از عملکرد دستگاه خمکاری و اطمینان از انجام روان فرآیند تولید، توصیه میشود که اپراتورها دقیقاً از دستورالعملهای عملیاتی فوق پیروی کنند و در کاربردهای عملی، پارامترها را بر اساس ویژگیهای قطعه کار به صورت انعطافپذیر تنظیم نمایند. در صورت نیاز به کمک بیشتر (مانند دریافت اسناد فنی بیشتر یا پاسخ به سؤالات خاص فرآیندی)، میتوانید هر زمان با تیم ما تماس بگیرید یا به وبسایت رسمی مراجعه کنید تا مواد پشتیبانی کامل مربوط به عملیات خمکاری را مشاهده نمایید و در بهینهسازی مداوم فرآیند پردازش فلز کمک بگیرید.

