















































مشکلات رایج در فرآیند جوشکاری با رباتهای جوشکاری
اثر جوشکاری توسط رباتها تحت تأثیر عوامل متعددی قرار دارد. بسیاری از مشتریان پیش از تسلط کامل بر استفاده از رباتهای جوشکاری، با مشکلات مختلفی روبهرو میشوند. این مشکلات عموماً ناشی از انجام عملیات نادرست یا تنظیمات نامناسب ربات هستند و با انجام تنظیمات مناسب قابل رفعاند. در ادامه، برخی از رایجترین مشکلاتی که در حین استفاده از رباتهای جوشکاری رخ میدهند و راهحلهای مربوط به آنها را بررسی خواهیم کرد.
الف. عدم ایجاد قوس الکتریکی موفق در حین جوشکاری
۱. قوس الکتریکی هنوز ایجاد نشده است

علت: برنامه قبل از اجرای دستور پایان قوس، دستور شروع قوس را شامل نمیشود.
راهحل: بررسی کنید که آیا دستور پایاندهی قوس اضافی یا دستور شروع قوس اضافی اضافه شده است.
۲. شکست در شروع قوس، خطای تشخیص سیگنال

روش حل مشکل:
۱) زمان تنظیمشده برای قطع جوشکاری را در صفحهٔ پارامترها بررسی کنید. بهطور کلی، تنظیم زمان ۵۰۰۰ میلیثانیه مناسب است.
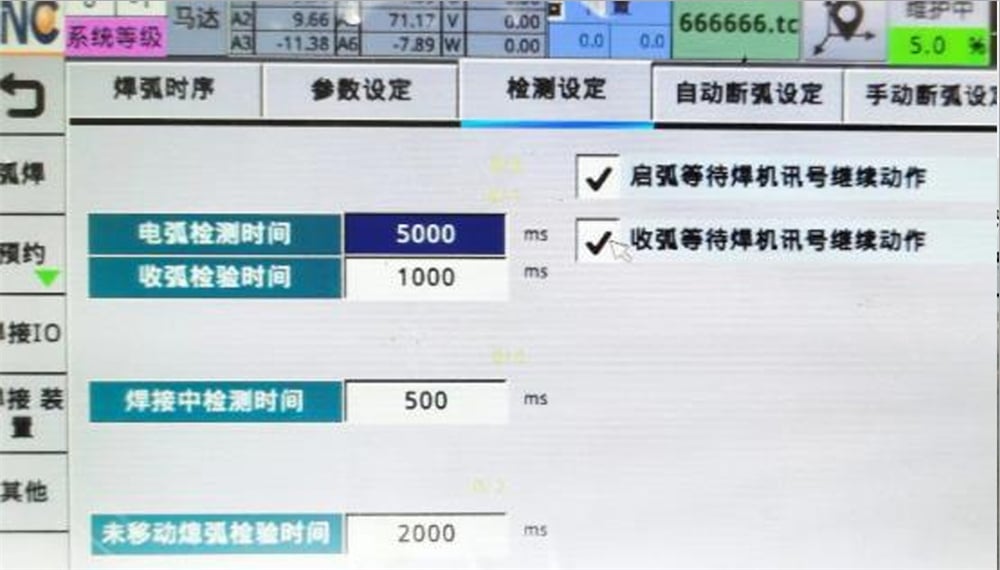
۲) بررسی کنید که آیا سیگنال دستگاه جوشکاری بهدرستی به سیستم منتقل شده است.
۳) بررسی کنید که آیا قطعهٔ کار به زمین متصل شده است.
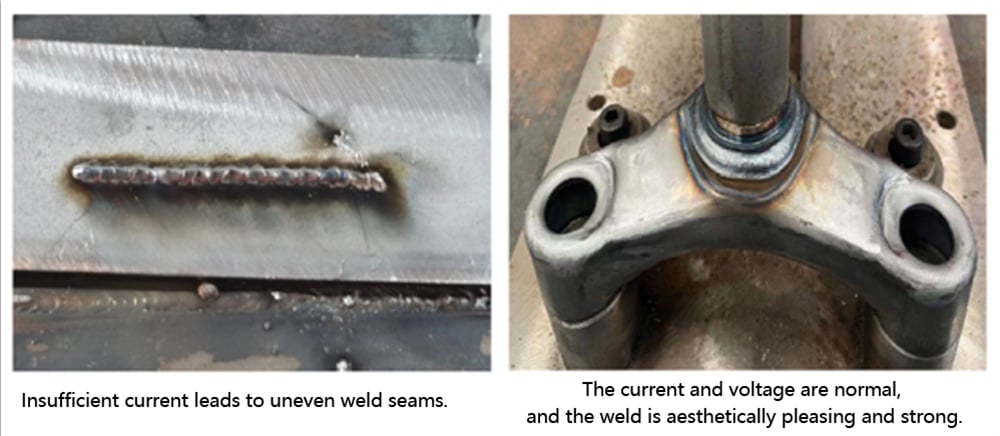
۳. ایجاد قوس و پارگی سیم جوش
دلایل:
۱) عدم تطابق جریان و ولتاژ
راهحل: باید جریان و ولتاژ مناسب را با توجه به ضخامت واقعی قطعهٔ کار و دستگاه جوشکاری تنظیم کرد.
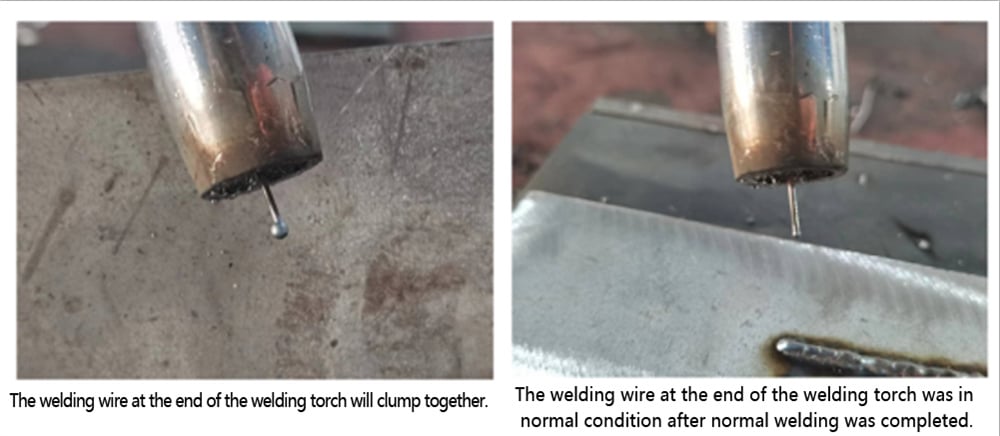
۲) طول سیم جوش بیش از حد زیاد است.
راهحل: بهطور کلی، طول امتداد سیم جوش باید ۱۰ تا ۱۵ برابر قطر سیم جوش باشد. طول مناسب سیم جوش را با توجه به قطر سیم جوش انتخاب کنید.
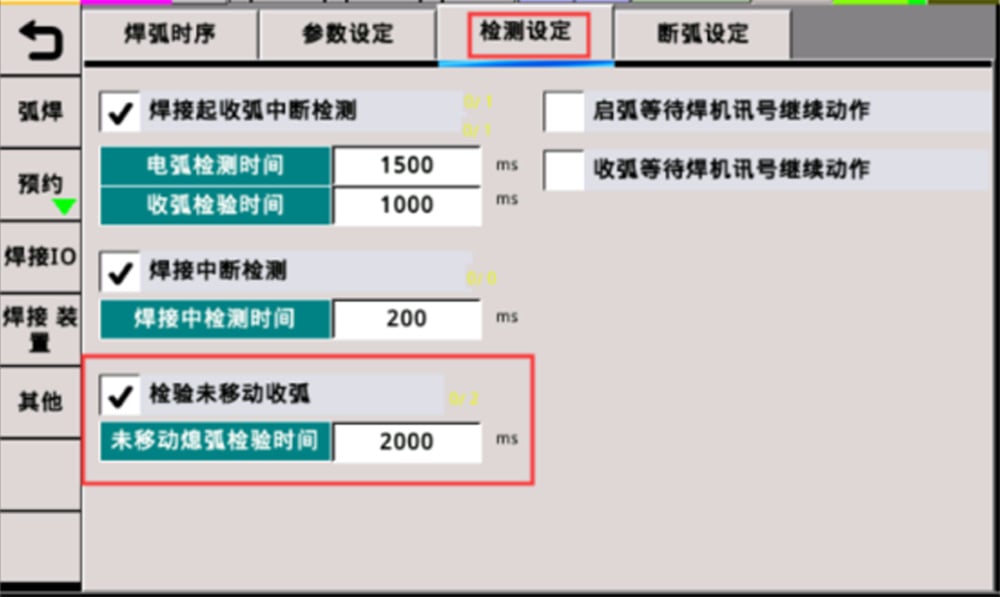
۴. خاموشی خودکار قوس پس از اشتعال قوس رخ میدهد.

رفع عیب: بررسی کنید که آیا مشکلی در تنظیمات زمان پارامتر وجود دارد و بررسی کنید که آیا مشعل جوشکاری حرکت کرده است.
II. قطع قوس در حین جوشکاری رخ میدهد.
دلایل:
۱. سیم جوشکاری با قطعه کار تماس ندارد و باعث فعالشدن آلارم قطع قوس میشود.
راهحل: موقعیت سیم جوشکاری و قطعه کار را دوباره تنظیم کنید تا در حین جوشکاری تماس کامل برقرار شود. (با این حال، سیم نباید بیش از حد به قطعه کار نزدیک باشد، زیرا این امر ممکن است منجر به سوراخشدن شود.)
۲. مسیر جوشکاری نامناسب باعث برخورد مشعل جوشکاری و بالا رفتن خودکار آن میشود.
راهحل: مسیر جوشکاری را دوباره تنظیم کنید.
۳. تماس ضعیف بین الکترودهای مثبت و منفی دستگاه جوشکاری.
راهحل: سیمکشی الکترودهای مثبت و منفی را بررسی کنید.
III. دلایل شکست در خاموشی قوس پس از جوشکاری:
۱. شکست در پایاندهی قوس به دلیل خطای تشخیص سیگنال.
علت: دستگاه جوشکاری سیگنالی از ربات دریافت نکرده است که منجر به شکست در پایاندهی قوس توسط ربات میشود.
حل مشکلات:
(۱) بررسی کنید که پارامترهای تنظیمشده معقول هستند یا خیر.
(۲) سیگنالهای ورودی/خروجی (IO) را بررسی کنید و اینکه آیا سیگنال نقطهٔ ورودی (I-point) برای پایاندهی قوس غیرطبیعی است یا خیر. اگر سیگنال نقطهٔ ورودی همواره روشن باشد...
(۳) بررسی کنید که آیا در مدار اتصال کوتاه وجود دارد یا خیر و اینکه سیم زمین بهدرستی متصل شده است یا خیر.
۲. پس از شروع قوس، دستور پایاندهی قوس تنظیم نشده است.

علت: هنگامی که این هشدار روی تاچپندانت ظاهر میشود، بررسی کنید که آیا دستور پایاندهی قوس فراموش شده است یا خیر.
راهحل: دستور پایاندهی قوس را پس از دستور شروع قوس در برنامه اضافه کنید.
این مقاله عمدتاً به معرفی مشکلات مربوط به شروع قوس، پایاندهی قوس و قطع ناگهانی قوس در طول فرآیند جوشکاری توسط رباتهای جوشکاری میپردازد. کاربران در صورت مواجهه با چنین مشکلاتی میتوانند به راهحلهای ارائهشده مراجعه کنند. اگر مشکل حل نشد، لطفاً از کارشناسان فنی شرکت جوگائو کمک بگیرید.
ربات جوشکاری، ربات خودکاری است که توابع متعدد جوشکاری از جمله جوشکاری با حفاظت گازی، جوشکاری قوس آرگون، برش پلاسما و جوشکاری لیزری را ادغام میکند. این ربات دارای انعطافپذیری بالا، تطبیقپذیری قوی، بازده جوشکاری بالا و کیفیت پایدار جوشکاری است و میتوان از آن بهطور گسترده در زمینههای مختلفی مانند ساخت ماشینآلات، تولید خودرو، الکترونیک دقیق و معادن زغالسنگ استفاده کرد.

