















































Problemas comunes en el proceso de soldadura con robots
El efecto de soldadura de los robots se ve afectado por muchos factores. Muchos clientes experimentan diversos problemas antes de adquirir soltura en el uso de robots soldadores. Estos problemas suelen deberse a una operación inadecuada o a configuraciones inapropiadas del robot, y pueden resolverse mediante ajustes adecuados. A continuación, revisaremos algunos problemas comunes que surgen durante el uso de robots soldadores y sus soluciones.
I. Encendido fallido del arco durante la soldadura
1. El arco aún no se ha encendido

Causa: El programa carece de un comando correspondiente de iniciación del arco antes de ejecutar el comando de terminación del arco.
Solución: Compruebe si se ha añadido un comando adicional de finalización de arco o un comando adicional de iniciación de arco.
2. Fallo en la iniciación del arco, error de detección de señal

Método de solución de problemas:
1) Compruebe la configuración del tiempo de interrupción de la soldadura en la página de parámetros. Por lo general, una configuración de tiempo de 5000 ms es adecuada.
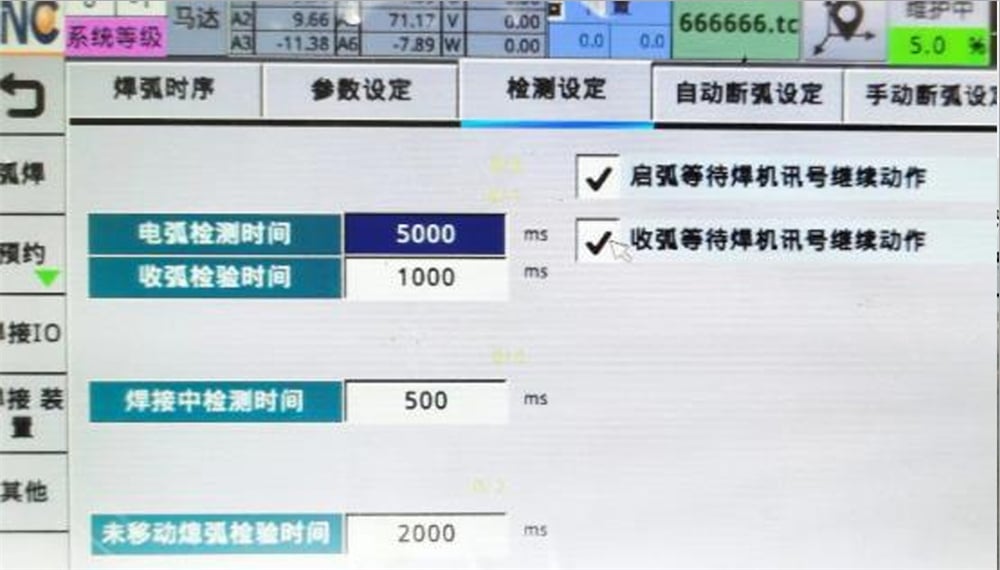
2) Compruebe si la señal de la máquina de soldadura se transmite correctamente al sistema.
3) Compruebe si la pieza de trabajo está conectada a tierra.
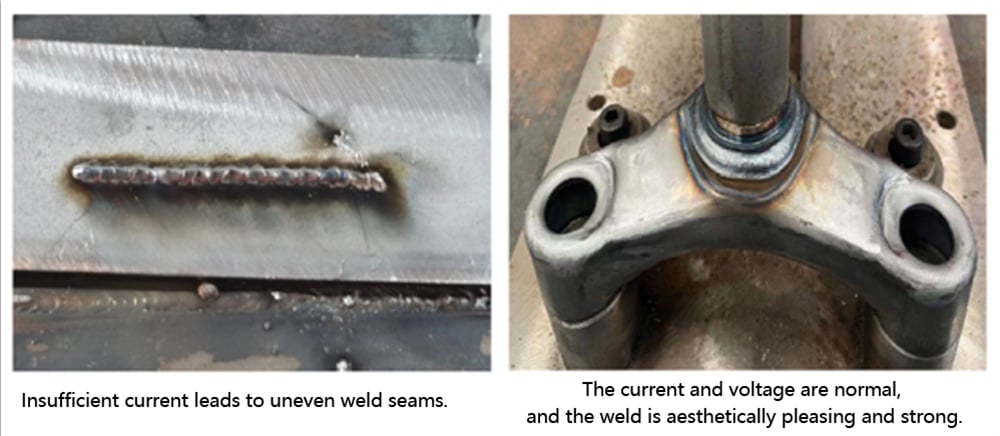
3. Arqueo y rotura del alambre de soldadura
Causas:
1) Desajuste entre corriente y voltaje
Solución: Debemos ajustar la corriente y el voltaje adecuados según el espesor real de la pieza de trabajo y la máquina de soldadura.
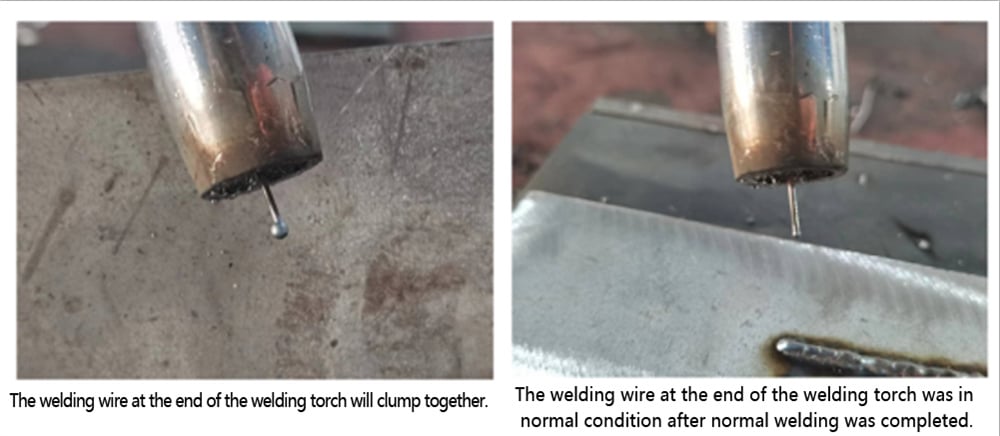
2) La longitud del alambre de soldadura es demasiado larga.
Solución: Por lo general, la longitud de la extensión del alambre de soldadura debe ser de 10 a 15 veces el diámetro del alambre de soldadura. Seleccione una longitud adecuada del alambre de soldadura según su diámetro.
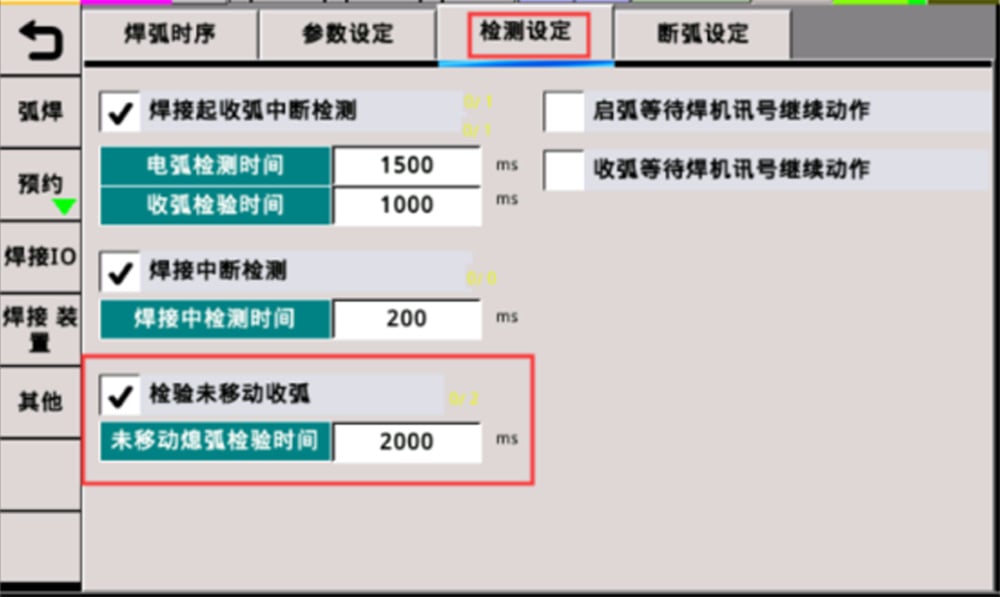
4. La extinción automática del arco se produce tras la ignición del arco.

Resolución de problemas: Compruebe si existe un problema con la configuración del parámetro de tiempo y verifique si la pistola de soldadura se ha desplazado.
II. Se produce una interrupción del arco durante la soldadura.
Causas:
1. El alambre de soldadura no toca la pieza de trabajo, lo que activa la alarma de interrupción del arco.
Solución: Ajuste nuevamente la posición del alambre de soldadura y de la pieza de trabajo para garantizar un contacto completo durante la soldadura. (No obstante, el alambre no debe estar demasiado cerca de la pieza de trabajo, ya que esto podría provocar perforación.)
2. Una trayectoria de soldadura inadecuada provoca una colisión de la pistola de soldadura y su elevación automática.
Solución: Restablezca la trayectoria de soldadura.
3. Contacto deficiente entre los electrodos positivo y negativo de la máquina de soldadura.
Solución: Compruebe la conexión de los cables de los electrodos positivo y negativo.
III. Causas del fallo en la terminación del arco tras la soldadura:
1. Fallo en la terminación del arco debido a un error de detección de señal.
Causa: La máquina de soldadura no recibió una señal del robot, lo que provocó el fallo en la terminación del arco por parte del robot.
Solución de problemas:
(1) Compruebe si los parámetros de configuración son razonables.
(2) Compruebe las señales de E/S y si la señal del punto I de terminación del arco es anómala. Si la señal del punto I permanece constantemente activada...
(3) Compruebe si existe un cortocircuito en el circuito y si el cable de tierra está conectado de forma anómala.
2. No se ha establecido ningún comando de terminación del arco tras la iniciación del arco.

Causa: Cuando esta alarma aparece en la unidad de enseñanza, compruebe si se olvidó el comando de terminación del arco.
Solución: Añada un comando de terminación del arco tras el comando de iniciación del arco en el programa.
Este artículo presenta principalmente problemas relacionados con la iniciación del arco, la terminación del arco y la interrupción del arco durante el proceso de soldadura de robots soldadores. Los usuarios pueden consultar las soluciones si encuentran dichos problemas. Si el problema no puede resolverse, póngase en contacto con el personal técnico de JUGAO.
El robot de soldadura es un robot automatizado que integra múltiples funciones de soldadura, como soldadura con protección gaseosa, soldadura por arco de argón, corte por plasma y soldadura láser. Cuenta con alta flexibilidad, gran capacidad de adaptación, elevada eficiencia en la soldadura y calidad estable de la soldadura, y puede utilizarse ampliamente en diversos sectores, como la fabricación mecánica, la fabricación de automóviles, la electrónica de precisión y la minería del carbón.

