















































Průvodce optimálním provozem řídicího systému DELEM DA53T/DA58T pro osu Z
Průvodce optimálním provozem řídicího systému DELEM DA53T/DA58T pro osu Z
Nesprávná konfigurace řídicího systému DELEM DA53T/DA58T pro osu Z může závažně ohrozit provozní účinnost ohraňovacích lisy. Tento komplexní průvodce podrobně popisuje správné nastavení a provozní metody řídicího systému pro osu Z, jehož cílem je pomoci obsluhám dosáhnout hladkého a vysoce přesného provozu ohraňovacích lisy prostřednictvím ovládnutí jeho základních funkcí a procesů konfigurace.
Řídicí jednotka osy Z DELEM DA53T/DA58T je specializovanou řídicí součástí vyvinutou pro CNC systém DELEM DA53T/DA58T. Je integrována s dotykovou obrazovkou Schneider Easy Harmony a PLC Schneider TM200, čímž se zvyšuje schopnost systému DA53T/DA58T řídit až 6+1 osu, což výrazně zvyšuje provozní flexibilitu a přesnost systému. Použitý model dotykové obrazovky je HMIET6401 s 7palcovým displejem o rozlišení 800×480 pixelů a TFT LCD displejem s paletou 16 milionů barev pro jasnou a intuitivní obsluhu.

1. Základní přehled provozu řídicí jednotky osy Z
U systémů řady DELEM DA5XT (včetně DA53T/DA58T) lze osu Z řídit jak v jednokrokovém, tak v mnohokrokovém programovacím režimu – stejně jako osy X a R lze režim řízení osy Z na systému DA5XT volně přizpůsobit.
Základní kroky programování osy Z jsou následující:
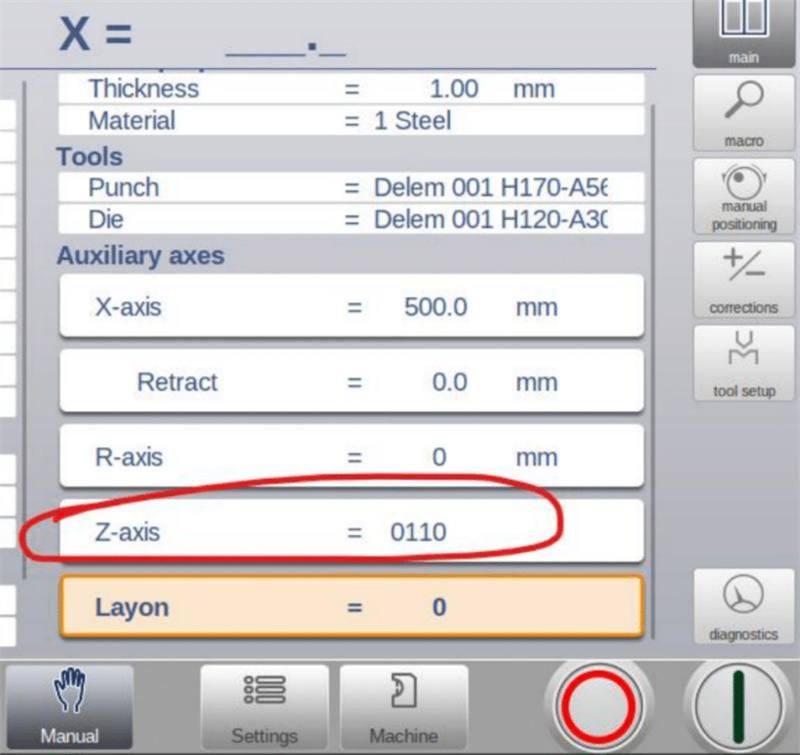
1. Na základě skutečné délky plechového materiálu a polohy razítka zadejte přesné souřadnice programování osy Z na dotykové obrazovce JUGAO;
2. Pro každý krok programování v systému DA5XT přiřaďte jedinečné ID osy Z (hodnota ID je ve dvojkové soustavě s konfigurovatelným rozsahem od 0000 do 1111).
Jednokrokový i vícekrokový režim provozu osy Z umožňují libovolné nastavení hodnot ID osy Z v rámci dvojkového rozsahu 0000–1111 a systém poskytuje vizuální příklady provozu pro oba režimy, aby usnadnil operátorovi pochopení a obsluhu.
2. Podrobný postup na dotykové obrazovce JUGAO
Dotyková obrazovka JUGAO je hlavním člověk-strojovým rozhraním pro ruční i automatický provoz osy Z, s jasnou a odlišnou logikou provozu pro různé pracovní režimy, stejně jako se speciálními postupy pro řešení neobvyklých situací a denní kalibraci.
2.1 Metoda ručního ovládání
Ruční ovládání osy Z je k dispozici pouze v případě, že je na dotykové obrazovce zobrazen ikona pro ruční ovládání; pokud ikona není zobrazena, je ruční ovládání zakázáno.
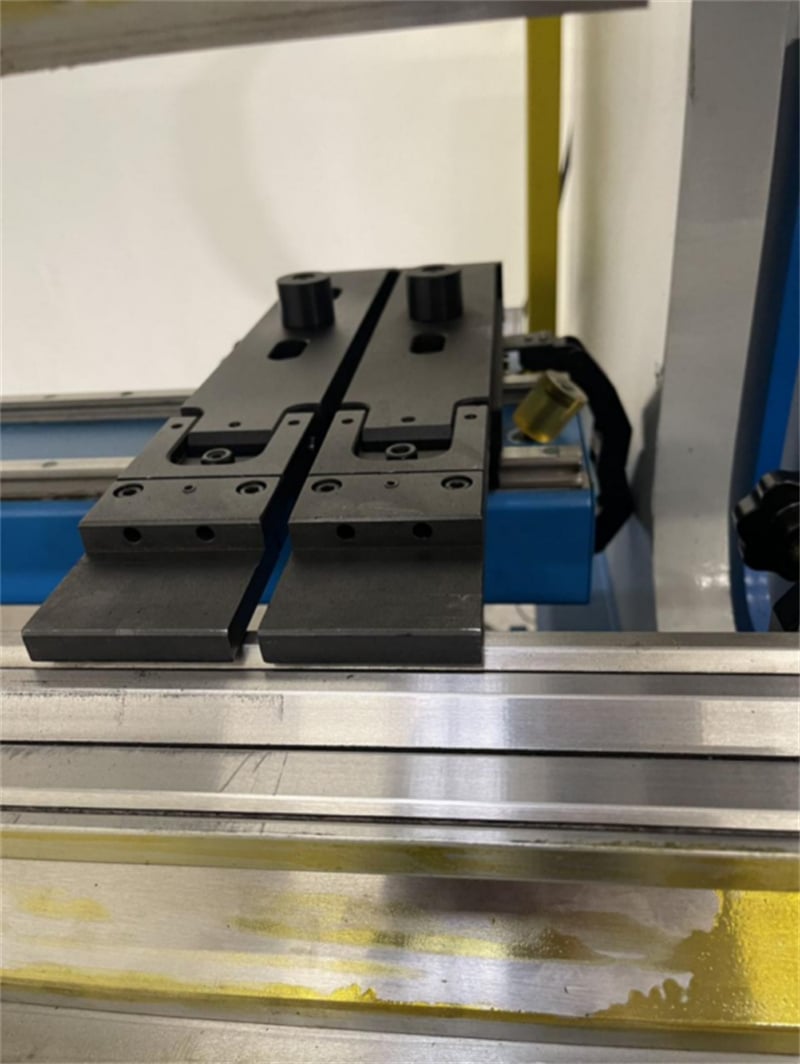
• Stiskněte tlačítko pro pohyb vpřed, aby se Z1 nebo Z2 posunuly ve směru zvyšující se hodnoty polohy (strana Y1 odpovídá poloze s minimální hodnotou osy Z a strana Y2 odpovídá poloze s maximální hodnotou osy Z);
• Stiskněte tlačítko pro pohyb vzad, aby se Z1 nebo Z2 posunuly ve směru snižující se hodnoty polohy; pohyb se okamžitě zastaví po uvolnění tlačítka;
• Přepínání mezi Z1 a Z2: Stiskněte tlačítko pro výběr osy; Z2 se zobrazí modře, což znamená, že Z2 je v režimu ručního ovládání; stiskněte tlačítko znovu, Z2 se vrátí na černou barvu a ruční ovládání se přepne zpět na Z1.
2.2 Metoda automatického provozu
Automatický provoz osy Z je spouštěn pomocí specializovaného tlačítka pro automatický start na dotykové obrazovce JUGAO za předpokladu kontroly stavu zařízení:
• Pokud není zapnutý olejový čerpadlo ohýbacího lisu, displej upozorní obsluhu, aby nejprve zapnulo olejové čerpadlo;
• Pokud je olejové čerpadlo v normálním provozním stavu, stisknutím klávesy automatického spuštění se osa Z přesune do přednastavené polohy odpovídající identifikátoru Id0000;
• Kdykoli můžete stisknout vyhrazenou klávesu zastavení na displeji, čímž okamžitě zastavíte automatický pohyb osy Z.
2.3 Zvládání poruch při kolizních nehodách
V případě kolize mezi zarážkami Z1 a Z2 během provozu zvládněte poruchu v následujícím pořadí:
1. Nejprve zkontrolujte, zda modul pohonu osy Z vyvolal poplach; pokud ano, vypněte napájení modulu pohonu a po jeho opětovném zapnutí resetujte poplach;
2. Pro obě osy Z1 a Z2 proveďte kalibrační operaci „učení“;
3. Na dotykovém displeji zadejte skutečné aktuální přesné polohové hodnoty os Z1 a Z2 a po potvrzení může systém obnovit normální další provoz.
2.4 Klíčové požadavky na učení (kalibraci) osy Z
Správné učení (kalibrace) osy Z je základním předpokladem pro normální a přesný provoz celého řídicího systému osy Z, a tato operace musí být provedena v následujících případech:
1. První zkušební chod a uvedení do provozu nové ohraňovací lisy vybavené řídicím systémem osy Z DA53T/DA58T;
2. Jakékoli náhodné srážky prstů zastavovacího zařízení osy Z nebo jiné neobvyklé mechanické nárazy na osu Z.
Je důležité poznamenat, že řídicí systém osy Z disponuje funkcí paměti při vypnutí napájení: parametry polohy osy Z získané kalibrací jsou systémem automaticky uloženy. Po vypnutí a následném zapnutí zařízení nemusí obsluha operaci učení (kalibrace) opakovat, protože systém může přímo vyvolat uložené parametry pro provoz.

