















































ET serisi için hızlı teşhis ve alarm arızalarının giderilmesi
ET serisi tam elektrikli servo bükme makinenizde alarm sorunlarıyla mı uğraşıyorsunuz? Doğru yere geldiniz. Bu makale, ET serisi alarm sorunlarını hızlıca gidermeye yönelik ayrıntılı bir kılavuz sunar ve üretim işlemlerinizin sorunsuz ve verimli şekilde devam etmesini sağlar. ET serisi alarmları yaygın olsa da doğru yaklaşım ile bu sorunları hızla çözebilir ve ekipmanınızı en iyi performansa geri döndürebilirsiniz. Bu sistemle yeni tanışıyor olmanız ya da arıza tespiti sürecinizi optimize etmek istiyorsanız, bu kılavuz çeşitli alarm sorunlarıyla etkili şekilde başa çıkmanıza yardımcı olacak temel adımları içerir.
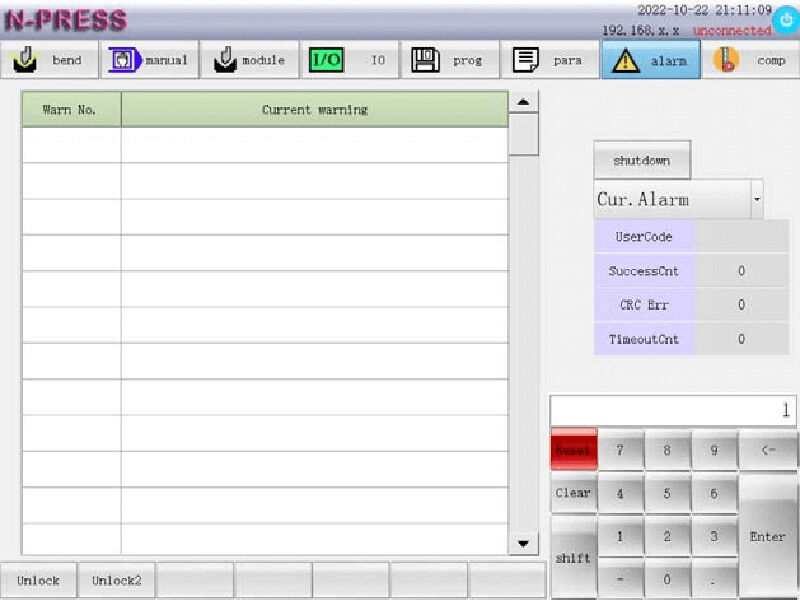
Adım 1: ET Serisi Alarm Arayüzüne Erişim
Tüm ET Serisi Alarm ayrıntılarını görüntülemek için 'alarm' işlev tuşuna tıklayın. Bu arayüz, mevcut alarm durumlarını, alarm kayıtlarını ve başarı sayısı, doğrulama hataları ve zaman aşımı süreleri gibi diğer kritik istatistikleri kapsamlı bir şekilde gösterir.
Alarm Kayıtlarını Analiz Edin
Geçmiş kayıtları inceleyerek oluşan alarmların sıklığını ve türünü belirleyin. ET Serisi Alarm doğrulama hataları ile zaman aşımı sorunlarının sayısına özellikle dikkat edin; çünkü bu durumlar, IO modülüyle yapılan iletişimde temel düzeyde sorunlar olduğunu gösterir.
Başarı Sayısı: Sistemin IO modülüyle yaptığı başarılı iletişimlerin sayısını yansıtır ve sistemin genel iletişim sağlığını gösterir.
Doğrulama Hataları: Sistemin IO modülüyle yaptığı veri iletişimi sırasında gerçekleşen doğrulama hatalarının sayısını gösterir. Yüksek sayıda hata, veri bütünlüğüyle ilgili sorunları işaret edebilir ve acil müdahale gerektirebilir.
Zaman Aşımı Sayıları: Sistem ile IO modülü arasındaki iletişim bağlantı hatalarının sayısını gösterir; bu, makine işlemlerini etkileyebilecek veri aktarımında olası kesintileri işaret eder.
Adım 2: ET Serisi Alarm Durumunun Yorumlanması
ET Serisi Alarmını etkili bir şekilde yönetmek için öncelikle alarm bilgilerindeki hata (ERRxxx) ve uyarı (ALMxxx) kodlarını kontrol edin. En son alarm kayıtları ‘Geçerli alarm’ olarak listelenir. Sorunları çözmek için talimatlara uygun hareket edin ve alarmı temizlemek, sistemin normal durumuna kavuşmasını sağlamak amacıyla sıfırlama tuşuna basın.
Bir CNC sistemi arızası meydana geldiğinde, en fazla beş geçerli alarm görüntülenir. Uyarı kodunu kaydedin ve önerilen eylemi gerçekleştirin; gerekirse profesyonel bakım personeline başvurun.
Bu adımları takip ederek ET Serisi Alarmını hızlıca teşhis edebilir, çalışma süresindeki kesintiyi azaltabilir ve verimliliği artırabilirsiniz.
Adım 3: ET Serisi Alarm Sorunlarının Giderilmesi
ET Serisi Alarm–Hata Kodu
ERR001: Güvenlik Işık Perdesi Alarmı
Neden: Y ekseni aşağı doğru hareket ederken insan vücudu veya diğer nesneler ışık perdesi alanına girer.
Çözüm: Işık perdesi alanında biri olup olmadığını veya güvenlik kafesi sisteminin arızalı olup olmadığını doğrulayın.
ERR002: Y1 ve Y2 Ekseni Konum Sapması
(Alarm, elle çalıştırma modunda oluştuğunda uyarır; bükme işlemi sırasında oluştuğunda da uyarır.)
Neden: Y1 ve Y2 eksenlerinin mutlak koordinat değerleri sapması, Y ekseninin maksimum sapma ayar değerini aşar.
Çözüm: Öncelikle Y1 ve Y2 eksenlerinin konum hatasının tolerans dışına çıkıp çıkmadığını kontrol edin. Daha sonra doğrusal kodlayıcının düzgün çalışıp çalışmadığını veya geçersiz olup olmadığını doğrulayın. Son olarak mekanik iletim sisteminde bir arıza olup olmadığını ve sistem parametrelerinde Y1 ve Y2 için belirlenen konum sapması izin verilen değerin çok küçük ayarlanıp ayarlanmadığını inceleyin.
ERR003: Basınç Makine Araçlarının Maksimum İzin Verilen Değerini Aştığında Alarm
Neden: Yanlış kalıp veya malzeme seçimi.
İşleme:
1. Kalıp ve Malzeme Seçimini Doğrulayın:
Kalıbın ve malzemenin doğru şekilde seçildiğinden emin olun.
2. Bükme Basıncını Kontrol Edin:
Programda, sentezde ve programlama arayüzünde bükme basıncının çok yüksek olup olmadığını inceleyin.
3. Basınç Değerlendirmesi:
Görüntülenen basınç, takım tezgâhının izin verilen sınırını aşıyorsa:
Kalıbı veya malzemeyi değiştirin.
Görüntülenen basınç izin verilen aralık içindeyse:
Üst ve alt kalıp yüksekliklerinin doğru ayarlandığını doğrulayın.
ERR004: Basınç Kalıbın İzin Verilen Değerini Aştığında Alarm
Neden: Yanlış kalıp veya malzeme seçimi.
İşleme:
1. Kalıp ve malzemenin doğru seçildiğini kontrol edin.
2. Programda, sentezde ve programlama arayüzünde bükme basıncının çok yüksek olup olmadığını doğrulayın.
Görüntülenen basınç kalıbın izin verilen basıncını aşıyorsa, kalıbı veya malzemeyi değiştirin.
Görüntülenen basınç kalıbın izin verilen aralığında ise üst ve alt kalıp yüksekliklerinin doğru ayarlandığından emin olun.
ERR005: Bükme İçin Basınç Sınırı Aşıldı
Neden: Yanlış kalıp veya malzeme seçimi.
İşleme:
1. Kalıp ve malzemenin doğru seçildiğini kontrol edin.
2. Programda, sentezde ve programlama arayüzünde bükme basıncının çok yüksek olup olmadığını doğrulayın.
3. Görüntülenen basınç kalıbın izin verilen basıncını aşıyorsa lütfen kalıbı veya malzemeyi değiştirin.
4. Görüntülenen basınç kalıbın izin verilen aralığında ise üst ve alt kalıp yüksekliklerinin doğru ayarlandığından emin olun.
ERR006: Basınç Algılama İletişim Zaman Aşımı
Neden: Sistem ile IO kartı arasındaki iletişim zaman aşımına uğradı.
Tedavi: Doğru IO kartı türü ayarlarının yapıldığından ve 485 iletişim kablolarının doğru bağlandığından emin olun.
ERR007: Basınç Algılama Kanalı Arızası
Neden: Analog değer çok düşüktür.
Çözüm: Doğru analog sinyal hattı bağlantılarını doğrulayın.
ERR008-ERR012: X-Z2 Ekseni Süper Pozitif Sert Limit
(Eğme sırasında alarm verilecektir; elle çalıştırma modunda oluşturulduğunda alarm verilecektir)
Neden: Her eksenin pozitif limit anahtarı eğme sırasında tetiklenmiştir.
İşleme:
1. Her eksenin pozitif limit anahtarı alanına girip girmedğini kontrol edin.
2. Her eksenin pozitif limit anahtarının arızalı olup olmadığını doğrulayın.
3. Manuel kontrol arayüzünü kullanarak her ekseni limit anahtarı alanından çıkarın.
ERR013-ERR017: X-Z1 Ekseni Negatif Sert Limiti Aşmıştır
(Eğme ve sıfır noktası bulma sırasında alarm verilecektir; manuel mod oluşturulduğunda alarm verilecektir)
Neden: Eğme sırasında her eksenin negatif limit anahtarı tetiklenmiştir.
İşleme:
1. Her ekseni, manuel kontrol arayüzünden hareket ettirerek limit anahtarı alanından çıkarın.
2. Her eksenin negatif limit anahtarı alanına girip girmedğini kontrol edin.
3. Her eksenin negatif limit anahtarının arızalı olup olmadığını kontrol edin.
ERR018-ERR022: X-Z2 Ekseni Süper Pozitif Yazılım Limiti
Neden: Her eksenin makine koordinatı, sistem parametresi tarafından belirlenen pozitif yazılım limit konumunu aşmıştır.
Tedavi: Sistem parametresi tarafından belirlenen her eksenin pozitif yazılım limit konumunun uygun olup olmadığını kontrol edin.
ERR023-ERR027: X-Z1 Ekseni Negatif Yazılım Limitini Aşmış
Neden: Her eksenin makine koordinatı, sistem parametresi tarafından belirlenen negatif yazılım limit konumunu aşmıştır.
Tedavi: Her eksenin sistem parametresi tarafından ayarlanan negatif yumuşak limit konumunun uygun olup olmadığı kontrol edilmelidir.
ERR028: Makine Tezgâhı Geçmiş Tarih Uyarısı
Neden: Makine tezgâhı geçerlilik tarihini geçmiş durumdadır.
Tedavi: Lütfen tedarikçiyle iletişime geçin.
ERR029-ERR034: Her Eksenin Servo Sürücüsü Uyarısı
Neden: İlgili eksenin servo sürücüsü bir uyarı vermiştir veya servo sürücünün bağlantısı başarısız olmuştur.
Tedavi: Servo sürücünün uyarısının nedenini kontrol edin ya da sistemin servo sürücüye bağlandığı kablo bağlantısını kontrol edin.
ERR035-ERR040: Her Milin Enkoder Uyarısı
Neden: İlgili milin enkoder sinyali hatalıdır.
Tedavi: Sistemin servo sürücüye bağlandığı kablo bağlantısındaki enkoderle ilgili sinyal kablolamasını kontrol edin.
ERR041-ERR046: Her Eksen İçin Hareket Olmayan Modda Servo Anormal Alarmı
Neden: İlgili eksen hareket komutu almadığında, geri bildirilen koordinatların anormal olduğu tespit edilir.
Çözüm: Kodlayıcı bağlantı kablosunu kontrol edin.
ERR047-ERR052: Her Eksen İçin Hareket Modunda Servo Anormal Alarmı
Neden: Her eksen için konum takip alarmı.
Çözüm: Konum takip hatası için izin verilen değerin çok küçük ayarlanıp ayarlanmadığını kontrol edin.
ERR053: Güç Kaybı Alarmı
Neden: Sistem güç kaynağı geriliminin çok düşük olduğu tespit edilir.
Çözüm: Güç kaynağının normal olup olmadığını kontrol edin.
ERR054: Sistem Alarmı
Neden: Sistem içi istisna.
Tedavi: Lütfen tedarikçiyle iletişime geçin.
HATA055: Acil Durdurma Alarmı
Neden: Acil durdurma tuşunun pressed olduğu tespit edildi.
Çözüm: Acil durdurma tuşunun pressed olup olmadığı kontrol edilmelidir.
HATA056: Tork Sınırı İçinde
Neden: Motorun maksimum tork değeri aşıldı.
Çözüm: Y-ekseni hızının veya ivmesinin çok yüksek ayarlanıp ayarlanmadığı kontrol edilmelidir.
HATA057: Z1 ve Z2 Arasındaki Mesafe Çok Küçük
Neden: Manuel kontrol modunda, manuel kontrol hareketi ile z-ekseni, sistem parametresi 603: z1z2’ye göre tanımlanan güvenlik mesafesini aştı.
Çözüm: Sistem parametreleriyle yapılan ayarların uygun olup olmadığı kontrol edilmelidir.
ERR059: Süresi Geçmiş Uyarı
Neden: Sistemin kullanılabilir süresi 2 günden azdır.
Çözüm: Tedarikçiyle iletişime geçin.
ERR060: Arkadaki Dişli 2, Negatif Yazılım Sınırını Aşıyor
Neden: Arkadaki dişli 2 kullanılırken, x ekseni makine koordinatı sistemin parametreleri tarafından belirlenen x ekseni negatif yazılım sınır konumunu aşıyor.
Çözüm: Arkadaki dişlinin uygun şekilde seçildiğini kontrol edin.
ERR061: Güvenlik Kapısı Alarmı
Neden: Kullanım sırasında güvenlik kapısı açılmıştır.
Çözüm: Güvenlik kapısının kapalı olduğunu kontrol edin.
ERR062: Klimalı Sistem Alarmı
Neden: Klimalı sistemin arızalanması.
Tedavi: Klimalı sistemi kontrol edin.
ERR063: Sapma Telafisi Zaman Aşımı
Neden: Sapma telafisi uzun süre boyunca tamamlanamıyor.
Tedavi: Sapma telafisi doğruluğunun çok küçük ayarlanıp ayarlanmadığını kontrol edin.
ERR064: Sapma Telafisi Yönü Hatası
Neden: Sapma telafisi motoru dönüş yönü hatası.
Tedavi: Sapma telafisi motorunun kablolamasının doğru olup olmadığını kontrol edin.
ERR065: Acil Durdurma Alarmı 1
Neden: Acil durdurma alarmı 1 giriş sinyali geçerli.
Tedavi: Acil durdurma alarmı 1'in giriş sinyalini kontrol edin.
ET Serisi Alarm-Alarm Kodu
ALM001-ALM006 X-Z2 Ekseni Sıfır Noktası Arama Başarısız
Olası Neden: Sistem, ilgili eksenin sıfır noktası sinyalini arama sırasında algılamaz veya ilgili eksenin sıfır noktası koordinatı yanlış şekilde ayarlanmıştır.
Tedavi: Sistem parametrelerinde ilgili eksenin üçüncü bölümü için belirlenen arama mesafesinin bir adımdan (pitch) daha az olup olmadığını kontrol edin. Ayrıca ilgili eksenin sıfır noktası koordinatlarını doğrulayın.
ALM007-ALM011 X-Z2 Ekseni Aşırı Pozitif Sert Limit
Olası Neden: İlgili milin pozitif limit anahtarı elle çalışma modunda tetiklenmiştir.
Tedavi: İlgili milin pozitif limit anahtarı bölgesine girdiğini veya pozitif limit anahtarının arızalı olduğunu kontrol edin. İlgili ekseni elle kontrol arayüzünden hareket ettirerek limit anahtarı bölgesinden çıkarın.
ALM012-ALM016 X-Z1 Ekseni Aşırı Negatif Sert Limit
Olası Neden: İlgili milin negatif limit anahtarı elle çalışma modunda tetiklenmiştir.
Tedavi: İlgili milin negatif limit anahtarı alanına girdiğini veya milin negatif limit anahtarının arızalı olduğunu kontrol edin. İlgili eksenin manuel kontrol arayüzünde hareket ettirilerek limit anahtarı alanından çıkılması sağlanmalıdır.
ALM017-ALM021 X-Z2 Ekseni Süper Pozitif Yazılım Limiti
Neden: İlgili milin ileri yöndeki yazılım limiti, manuel modda tetiklenmiştir.
Tedavi: İlgili ekseni manuel kontrol arayüzünde yazılım limitinden çıkarmak için hareket ettirin ve sistem parametrelerindeki yazılım limit ayarının uygun olup olmadığını kontrol edin.
ALM022-ALM026 X-Z1 Ekseni Aşırı Negatif Yazılım Limiti
Neden: İlgili eksende negatif yazılım limiti, manuel modda tetiklenmiştir.
Tedavi: İlgili ekseni manuel kontrol arayüzünde yazılım limitinden çıkarmak için hareket ettirin ve sistem parametrelerindeki yazılım limit ayarının uygun olup olmadığını kontrol edin.
Y1 ve Y2 Eksenlerinde Konum Sapması Sınırı Aşmıştır
Neden: Y1 ve Y2 eksenlerinin mutlak koordinat değerleri sapması, manuel modda Y ekseni için tanımlanan maksimum sapma ayar değerini aşmıştır.
Tedavi: Y1 ve Y2 eksenlerinin konum hatasının tolerans dışına çıkıp çıkmadığını kontrol edin; doğrusal kodlayıcının geçersiz olup olmadığını doğrulayın; mekanik iletim sisteminde arıza olup olmadığını kontrol edin. Eksenel konum sapmasını azaltacak yönde Y1 ve Y2’yi hareket ettirin.
ALM028-ALM033 X-Z2 Ekseni Sıfır Konumu Sapması Limiti Aşmıştır
Neden: Referans noktası modunda, ilgili eksenin orijin araması sonrasında elde edilen makine koordinat değeri, sistem parametreleri 260-263 ve 608-609’da kayıtlı değerden önemli ölçüde farklıdır.
Tedavi: Sistem parametreleri 260-263 ve 608-609’un doğru ayarlandığından emin olun.
ALM034 Yağlama Pompası Uyarısı
Neden: Yağlama pompasının çıkış basıncı yetersizdir.
Tedavi: Yağlayıcı gresin bitip bitmediğini kontrol edin. Eğer bitmişse, No. 00 aşırı basınçlı lityum bazlı yağlayıcı gres ilave edin. Eğer bitmemişse, yağlama pompasının normal çalışıp çalışmadığını, yağlama borusunda sızıntı olup olmadığını ve yağlama pompasının sinyal kablosunun doğru şekilde bağlı olup olmadığını kontrol edin.
ALM035 Takım Sıkılamamıştır
Neden: Hidrolik takım tutucunun sıkma sinyali algılanmadı.
Tedavi: Hidrolik takım tutucunun sıkma sinyali kablolamasının doğru olup olmadığını kontrol edin.
ALM036 ZLZ2 Aralığı Çok Küçük
Neden: Manuel kontrol modunda z ekseni, sistem parametresi 603'e göre güvenlik mesafesini aştı: z1z2.
Tedavi: Sistem parametreleriyle ayarlanan parametrelerin uygun olup olmadığını kontrol edin.
ALM037 Güvenlik Işık Perdesi Uyarısı
Neden: Işık perdesi sinyalinin geçerli olduğu tespit edildi.
Tedavi: Işık perdesinin engellenip engellenmediğini kontrol edin.
ALM038 Süresi Geçmiş Uyarısı
Neden: Sistemin kullanılabilir süresi 2 günden azdır.
Çözüm: Tedarikçiyle iletişime geçin.
ALM039 Sapma Kompanzasyonu Pozitif Limiti
Neden: Sapma telafisi mekanizması pozitif sınırı aşıyor.
Tedavi: Sapma telafisi mekanizmasının hareket yönünü ve sınır sinyali bağlantısının doğru olup olmadığını kontrol edin.
ALM040 Sapma Telafisi Negatif Sınırı
Neden: Sapma telafisi mekanizması negatif sınırı aşıyor.
Tedavi: Sapma telafisi mekanizmasının hareket yönünü ve sınır sinyali bağlantısının doğru olup olmadığını kontrol edin.
ALM041 Sapma Telafisi
Neden: Sapma telafisinde uyarı veriliyor.
Tedavi: Sapma telafisi doğruluk ayarının çok küçük olup olmadığını kontrol edin.
ALM042 Y Ekseni Eğimi
Neden: Y ekseni eğimi giriş sinyali geçerli.
Tedavi: Y1Y2’nin paralel olup olmadığını ve sıfır noktası ayarının doğru olup olmadığını kontrol edin.
Sonuç
Özetle, ET serisi kalıp alarmarının hızlı şekilde giderilmesinin anahtarı, yaygın arızaları etkili bir şekilde tanımlamak ve çözmek için temel adımları öğrenmektir. Bu makalede açıklanan prosedürleri—örneğin kablo bağlantılarını kontrol etme, sistem parametrelerini kalibre etme ve rutin bakım işlemlerini gerçekleştirme—takip ederek durma sürelerini en aza indirir ve üretim verimliliğini sağlarsınız.
Daha fazla yardım veya daha ayrıntılı teknik bilgi için lütfen teknik destek ekibimiz JUGAO CNC MACHINE ile iletişime geçmekten çekinmeyin. Ürünlerimizi daha verimli kullanmanıza yardımcı olmak amacıyla profesyonel tavsiyeler ve ek kaynaklar sağlamaya hazırız. Ayrıca bükme makinesi bakımı ve performans optimizasyonu hakkında daha fazla bilgi edinmek için diğer teknik dokümanlarımızı da inceleyebilirsiniz.

