















































Брза дијагноза и управљање грешкама аларма у серији ЕТ
Да ли се бориш са проблемима са алармом на својој ЕТ серији електричне серво-гибе машине? Дошао си на право место. Овај чланак ће пружити детаљан водич о томе како брзо решити проблеме са аларма серије ЕТ, осигурајући глатки и ефикасан производњи. Иако су аларми серије ЕТ уобичајени, са правом стратегијом можете их брзо решити и вратити опрему на оптимално функционисање. Било да сте нови у овом систему или желите да оптимизујете процес решавања проблема, овај водич ће вам пружити кључне кораке који ће вам помоћи да ефикасно управљате различитим проблемима аларма.
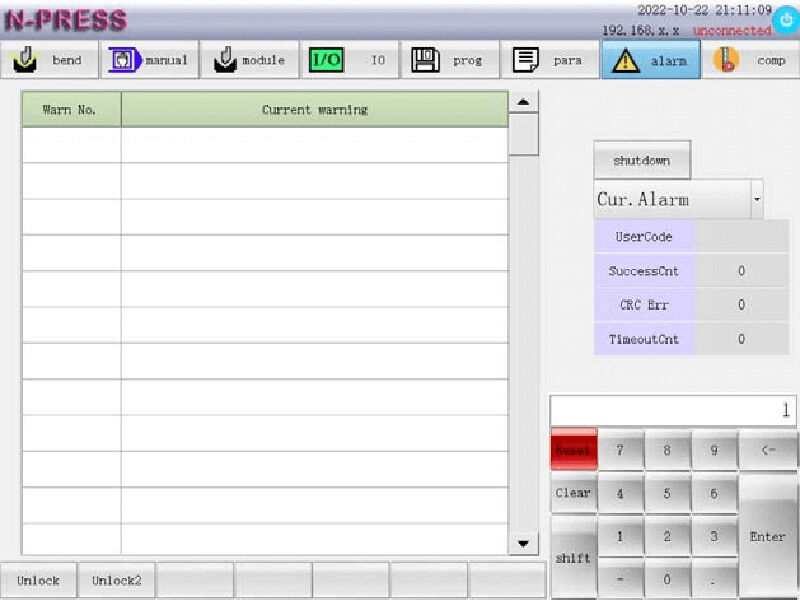
Корак 1: Приступ интерфејсу за аларм серије ЕТ
Кликните на кључ функције аларм да бисте добили приступ интерфејсу и прегледали све детаље о ЕТ серији аларма. Овај интерфејс пружа свеобухватан приказ тренутних аларма, записа аларма и других кључних статистика као што су времена успеха, грешке у верификацији и времена за одлагање.
Анализирајте записе аларма
Разумејте учесталост и врсту аларма који се јављају прегледајући претходне записи. Посебна пажња треба посветити броју грешака у верификацији аларма серије ЕТ и проблемима са временским излазом, јер они указују на основне проблеме комуникације са ИО модулом.
Времена успеха: Олицерива број успешних комуникација између система и IO модула, што указује на општу здрављу комуникације система.
Проверне грешке: приказује број грешки у верификацији у комуникацији података између система и ИО модула. Висок број грешака може указивати на проблеме са интегритетом података којима се треба одмах обратити.
Времена изласка: Показа број грешки у комуникацијској повези између система и IO модула, сигналишући потенцијалне прекиде у преносу података који би могли утицати на рад машине.
Корак 2: Интерпретација статуса аларма серије ЕТ
Да би се ефикасно управљао алармом серије ЕТ, прво проверите информације о аларму на грешке (ЕРРхкс) и кодове упозорења (АЛМхкс). Најновији аларми су на листи као Текућа аларма. Следите упутства за решавање проблема и притиснете кључ ресета да бисте очистили аларм, враћајући систем у нормалу.
Ако се деси неуспех ЦНЦ система, упозорења ће приказивати до пет тренутних аларма. Запишите код упозорења и предузмите препоручене мере или се обратите професионалном особљу за одржавање ако је потребно.
Следећи ове кораке, можете брзо решити проблеме са алармом серије ЕТ, смањујући време простора и повећавајући продуктивност.
Корак 3: Решавање проблема са алармом серије ЕТ
ИТ серија код за аларм-грешу
ERR001: Аларм за заштиту светла
Узрок: Када се осица у креће надоле, људско тело или други објекти улазе у подручје светлосне завесе.
Обработка: Проверите да ли је неко у подручју светлосне завесе или да ли је безбедносна решетка неисправна.
ERR002: Одвијање позиције оси Y1 и Y2
(Аларм ће бити подстакнут када се генерише у ручном режиму, а аларм ће бити подстакнут када се генерише у завивању.)
Причина: Апсолутно одступање вредности координата оси Y1 и оси Y2 премаши величину максималног подешавања одступања оси Y.
Обрада: Прво проверите да ли је грешка положаја оси Y1 и Y2 изван толеранције. Затим проверите да ли линеарни енкодер функционише исправно или да ли је неважећи. Затим испитајте да ли постоји грешка у механичком преносу и да ли је дозвољена вредност одступања положаја за параметре система Y1 и Y2 постављена превише мала.
ERR003: аларм када притисак прелази максимално дозвољену вредност алата
Узрок: Изабран погрешан калам или материјал.
Лечење:
1. у вези са Проверите избор калупа и материјала:
Уверите се да су каламбур и материјал правилно одабрани.
2. Уколико је потребно. Проверите притисак савијања:
Проверите да ли је притисак на савијању у програму, синтезу и интерфејсу за програмирање превише висок.
3. Уколико је потребно. Процена притиска:
Ако се приказан притисак премаши дозвољену границу алата:
Замените калупу или материјал.
Ако је приказани притисак у дозвољеном опсегу:
Проверите исправно подешавање горње и доње височине реза.
ЕРР004: аларм када притисак прелази дозвољену вредност калупа
Узрок: Изабран погрешан калам или материјал.
Лечење:
1. у вези са Проверите да ли су калупа и материјал правилно одабрани.
2. Уколико је потребно. Проверите да ли је притисак на савијању у програму, синтезу и интерфејсу за програмирање сувише велики.
Ако се показани притисак премаши допустиви притисак калупе, замените калупу или материјал.
Ако је приказан притисак у дозвољеном опсегу калупе, уверите се да су горња и доња висина калупе правилно подешаване.
ЕРР005: Прекопрековање граничног притиска за савијање
Узрок: Изабран погрешан калам или материјал.
Лечење:
1. у вези са Проверите да ли су калупа и материјал правилно одабрани.
2. Уколико је потребно. Проверите да ли је притисак на савијању у програму, синтезу и интерфејсу за програмирање сувише велики.
3. Уколико је потребно. Ако је приказан притисак већи од дозвољеног притиска калупе, замените калупу или материјал.
4. Уколико је потребно. Ако је приказан притисак у дозвољеном опсегу калупе, уверите се да су горња и доња висина калупе правилно подешаване.
ЕРР006: Временско одлазак комуникације за детекцију притиска
Узрок: комуникација између система и ИО плоче за време.
Обрада: обезбедите исправна подешавања типа IO плоче и одговарајуће повезивање 485 комуникационих линија.
ЕРР007: Недостатак канала за детекцију притиска
Узрок: Аналогна вредност је сувише ниска.
Обрада: Потврдите исправне повезивања аналогних линија сигнала.
ЕРР008-ЕРР12: Х-З2 Оси суперпозитивна тврда граница
(Аларм ће се активирати када се савија; аларм ће се активирати када се генерише ручни режим)
Узрок: Позитивни гранични прекидач сваке оске се активира током савијања.
Лечење:
1. у вези са Проверите да ли је свака оска ушла у позитивну граничну површину прекидача.
2. Уколико је потребно. Проверите да ли је прекидач позитивне границе сваке оске неисправан.
3. Уколико је потребно. Употребити ручно управљање интерфејс да се померају сваке оси изван подручја ограничења прекидача.
ERR013-ERR017: Оси Х-З1 прелазе негативну тврду границу
(Аларм ће се активирати када се савија и пронађе нуларна тачка; аларм ће се активирати када се генерише ручни режим)
Узрок: негативни гранични прекидач сваке ваље активиран је током савијања.
Лечење:
1. у вези са Померите сваку оску у интерфејсу ручног управљања да бисте изашли из подручја ограничења прекидача.
2. Уколико је потребно. Проверите да ли сваки ваљд улази у негативну граничну зону прекидача.
3. Уколико је потребно. Проверите да ли је прекидач негативне границе сваког вала неуспео.
ЕРР018-ЕРР022: Х-З2 оси суперпозитивна мека граница
Узрок: Координате машине сваке оске прелазе позитивну меку граничну позицију постављену системским параметром.
Обрада: Проверите да ли је позитивна мека граница позиције сваке оске постављена системским параметром прикладна.
ЕРР023-ЕРР027: Оси Х-З1 преко негативне меке границе
Узрок: Координате машине сваке оске прелазе негативну меку граничну позицију постављену системским параметром.
Обрада: Проверите да ли је одговарајући негативан меки гранични положај сваке оске постављен системом параметра.
ЕРР028: Озабављено буђење за алате
Узрок: машина за алате је каснила.
Лечење: Молимо вас контактирајте добављача.
ЕРР029-ЕРР034: аларм сервоволатера сваке оске
Узрок: Серводиривер одговарајуће оси издаје аларм или се не може повезати серводиривер.
Лечење: Проверите узрок аларма серводиривера или проверите кабел за повезивање између система и серводиривера.
ЕРР035-ЕРР040: Енкодерски аларм сваке шахте
Узрок: Сигнал кодера одговарајуће огреве је погрешан.
Опрачавање: Проверите жице за сигнал повезане са енкодером у кабелу за повезивање између система и серво-диривера.
ERR041-ERR046: Серво абнормални аларм за некретни режим сваке оске
Узрок: Када одговарајућа оска не прими команду за кретање, она открива да су координате које се враћају абнормалне.
Лечење: Проверите кабел за повезивање енкодера.
ERR047-ERR052: Серво абнормална аларма за сваки режим кретања оси
Узрок: аларм за праћење позиције сваке оске.
Обрада: Проверите да ли је дозвољена вредност грешке праћења положаја постављена превише мала.
ЕРР053: аларм за отказ струје
Узрок: Напетост на системском напајању је откривена као превише ниска.
Лечење: Проверите да ли је напајање нормално.
ЕРР054: Системска аларма
Узрок: интерна изузетка система.
Лечење: Молимо вас контактирајте добављача.
ERR055: Аларм за хитно заустављање
Узрок: Откривено је да је притиснут кључ за хитно заустављање.
Лечење: Проверите да ли је притиснут кључ за заустављање у случају хитне ситуације.
ERR056: У граници крутног момента
Узрок: Прекошао се максимални вртећи момент мотора.
Обрада: Проверите да ли је брзина или забрзање на уосу у постављено сувише велико.
ЕРР057: Растојање између З1 и З2 је сувише мало
Узрок: оси z ручног управљања покретом у режиму ручног управљања прелази безбедносну удаљеност системског параметра 603: z1z2.
Обрада: Проверите да ли су параметри постављени системским параметрима одговарајући.
ЕРР059: Прекомерно упозорење
Узрок: Временски период корисности система је мањи од 2 дана.
Лечење: Обратите се произвођачу.
ERR060: Задни редуктор 2 прелази негативну меку границу
Причина: Када се користи задња передања 2, координате машине за х оску прелазе позицију негативне меке границе за х оску, утврђену системским параметром.
Обрада: Проверите да ли је задња редукција одабрана разумно.
ЕРР061: аларм за безбедносна врата
Узрок: безбедносна врата су отворена током коришћења.
Лечење: Проверите да ли је сигурносно врата затворена.
ЕРР062: аларм за климатера
Узрок: Порекло климатера.
Лечење: Проверите клима.
ЕРР063: Временска граница за компензацију дефикције
Узрок: Компенсација дефлекције се не може завршити дуго времена.
Обрада: Проверите да ли је тачност компензације одвијања постављена превише мала.
ERR064: Грешка у правцу компензације дефикције
Узрок: грешка у правцу ротације мотора за компензацију дефлекције.
Обрада: Проверите да ли је жицање мотора за компензацију дефлекције исправно.
ЕРР065: Аваријски аларм за заустављање 1
Узрок: Улазни сигнал аварије за заустављање 1 је важећи.
Обрада: Проверите улазни сигнал аларма за хитну заустављање 1.
ИТ серија аларм-аларм код
АЛМ001-АЛМ006 Х-З2 Оси Проналажење порекла није успело
Узрок: систем не открива сигнал порекла одговарајуће оси током претраге или је координата порекла одговарајуће оси подешена погрешно.
Обрада: Проверите да ли је удаљеност тражења трећег одељка одговарајуће оси у параметрима система мања од једног пича. Такође проверите координате порекла одговарајуће оси.
АЛМ007-АЛМ011 Х-З2 Оси суперпозитивна тврда граница
Узрок: Позитивни гранични прекидач одговарајуће ваље активиран је у ручном режиму.
Обрада: Проверите да ли одговарајући ваљ улази у подручје позитивног граничног прекидача или да ли позитивни гранични прекидач ваља пропада. Покретање одговарајуће оси у интерфејсу ручног управљања да би изашла из подручја ограничења прекидача.
АЛМ012-АЛМ016 Х-З1 Оси супер негативна тврда граница
Узрок: негативни ограничивач одговарајуће ваље активиран је у ручном режиму.
Обрада: Проверите да ли одговарајући ваљ улази у подручје негативног граничног прекидача или да ли негативни гранични прекидач ваља пропада. Покретање одговарајуће оси у интерфејсу ручног управљања да би изашла из подручја ограничења прекидача.
АЛМ017-АЛМ021 Х-З2 Оси Супер позитивна мека граница
Узрок: Предња мека граница одговарајуће огребе активирана је у ручном режиму.
Обрада: Померите одговарајућу оску у интерфејсу ручне контроле да бисте изашли из меке границе и проверите да ли је подешавање меке границе у параметрима система одговарајуће.
АЛМ022-АЛМ026 Оси Х-З1 преко негативне меке границе
Причина: У ручном режиму активирана је негативна мека граница одговарајуће оси.
Обрада: Померите одговарајућу оску у интерфејсу ручне контроле да бисте изашли из меке границе и проверите да ли је подешавање меке границе у параметрима система одговарајуће.
ALM027 Одступање позиције оси Y1 и Y2 прелази границу
Причина: Апсолутно одступање вредности координата оси Y1 и Y2 премаши величину максималног подешавања одступања оси Y у ручном режиму.
Обрада: Проверите да ли је грешка положаја оси Y1 и Y2 изван толеранције; проверите да ли је линеарни енкодер неважећи; проверите да ли је механички преносивач оштећен. Покретање И1 и И2 у правцу који смањује одступање осевне позиције.
АЛМ028-АЛМ033 Х-З2 Оси нултова позиција одступања прелази границу
Узрок: У режиму референтне тачке, вредност машинске координате одговарајуће оси након претраге порекла се значајно разликује од вредности забележене у системским параметрима 260-263608-609.
Обрада: Проверите да ли су системски параметри 260-263608-609 правилно постављени.
Упозорење о мазивачкој пумпи
Узрок: Излазни притисак марење пумпе је недовољан.
Обрада: Проверите да ли је смазљива мастица потрошена. У том случају, додајте маст за смазање литијумске основе под екстремним притиском број 00. Ако није тако, проверите да ли је маривна пумпа нормална или да ли маривна цевка има пропуст и да ли је сигнална линија маривне пумпе правилно повезана.
АЛМ035 Инструмент није запленен
Причина: није откривен сигнал за запленење хидрауличког држача алата.
Обрада: Проверите да ли је жица за запртњавање сигнала хидрауличког носилаца алата исправна.
АЛМ036 ЗЛЗ2 Превише мали растојање
Узрок: оси z у режиму ручне контроле прелази безбедносну удаљеност системског параметра 603: z1z2.
Обрада: Проверите да ли су параметри постављени системским параметрима одговарајући.
ALM037 Предупређење за заштиту светла
Причина: Сигнал светлосне завесе је утврђен као валидан.
Лечење: Проверите да ли је светла за завесу блокирана.
ALM038 Предузређено упозорење
Узрок: Временски период корисности система је мањи од 2 дана.
Лечење: Обратите се произвођачу.
ALM039 Позитивна граница компензације одвијања
Узрок: Механизам компензације одвијања прелази позитивну границу.
Обрада: Проверите правцу кретања механизма за компензацију одвијања и да ли је веза граничног сигнала тачна.
ALM040 Негативна граница компензације дефлекције
Узрок: Механизам компензације одвијања прелази негативну границу.
Обрада: Проверите правцу кретања механизма за компензацију одвијања и да ли је веза граничног сигнала тачна.
ALM041 Компенсација одвијања
Узрок: хитна компензација одвијања.
Обрада: Проверите да ли је подешавање тачности компензације одвијања сувише мало.
ALM042 И-оси нагиб
Узрок: Улазни сигнал нагиба оси Y је валидан.
Обрада: Проверите да ли је Y1Y2 паралелан и да ли је поставка порекла тачна.
Закључак
Укратко, кључ за брзо решавање проблема са аларма за кашалоке серије ЕТ лежи у савладавању основних корака за ефикасно идентификовање и решавање уобичајених грешка. Ако пратите процедуре наведене у овом чланкукао што су провера веза за жице, калибрирање параметара система и обављање рутинског одржавањамоћи ћете да минимизирате време простора и осигурате ефикасност производње.
За додатну помоћ или детаљније техничке информације, молимо вас да се не бринете о нашем тиму техничке подршке, JUGAO CNC MACHINE. Спремни смо да вам пружимо професионалне савете и додатна средства како бисмо вам помогли да ефикасније користите наше производе. Такође можете погледати наше друге техничке документе за додатне информације о одржавању и оптимизацији перформанси машине за савијање.

