















































Vodnik za optimalno obratovanje nadzornika osi Z DELEM DA53T/DA58T
Vodnik za optimalno obratovanje nadzornika osi Z DELEM DA53T/DA58T
Napačna konfiguracija nadzornika Z-osi DELEM DA53T/DA58T lahko zelo resno ogrozi obratovalno učinkovitost gugalnih presežnikov. Ta izčrpni vodnik podrobno opisuje pravilne nastavitve in obratovalne metode nadzornika Z-osi ter si prizadeva pomagati operaterjem doseči gladko in visoko natančno obratovanje gugalnih presežnikov z osvajanjem njegovih osnovnih funkcij in procesov konfiguracije.
Krmilnik Z-osi DELEM DA53T/DA58T je specializirana krmilna komponenta, razvita za CNC-sistem DELEM DA53T/DA58T. Integriran je z dotikalnim zaslonom Schneider Easy Harmony in PLC-jem Schneider TM200; ta integracija nadgradi sistem DA53T/DA58T tako, da omogoča krmiljenje 6+1 osi, kar znatno izboljša operativno fleksibilnost in natančnost sistema. Uporabljen model dotikalnega zaslona je HMIET6401 z 7-palčnim zaslonom, ločljivostjo 800 × 480 pik in TFT-LCD zaslonom s 16 milijoni barv za jasno in intuitivno uporabo.

1. Osnovni pregled delovanja krmilnika Z-osi
Pri sistemih serije DELEM DA5XT (vključno z DA53T/DA58T) se Z-os lahko krmili v enokorakem in večkorakem programskem načinu – podobno kot osi X in R se način krmiljenja Z-osi prosto prilagodi na sistemu DA5XT.
Osnovni koraki za programiranje Z-osi so naslednji:
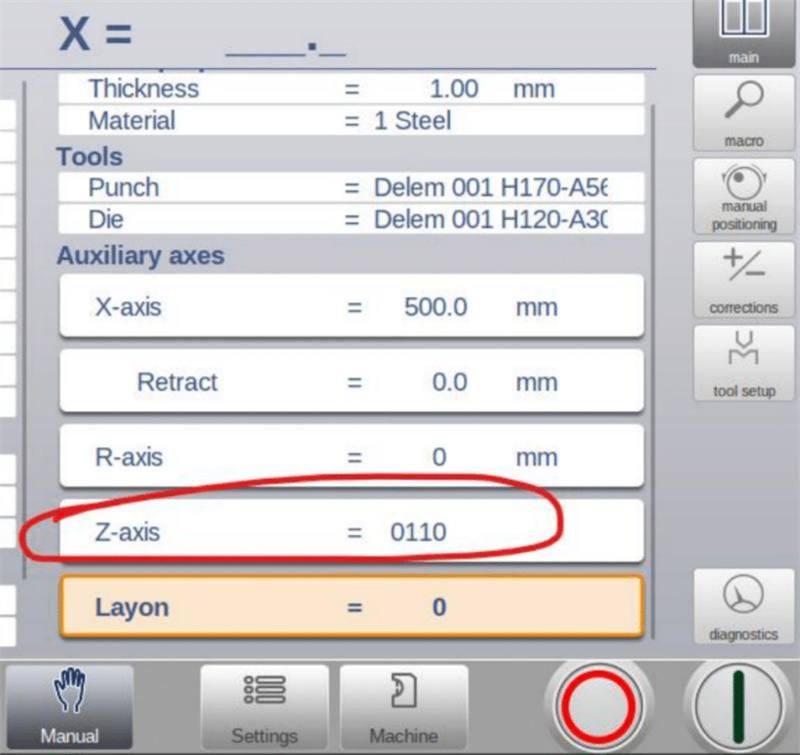
1. Na dotikalnem zaslonu JUGAO vnesite natančne koordinate programske osi Z na podlagi dejanske dolžine lima in položaja udarca;
2. Vsakemu programskemu koraku na sistemu DA5XT dodelite edinstven ID osi Z (vrednost ID-ja je v binarnem formatu z nastavljivim obsegom od 0000 do 1111).
V obeh načinih delovanja osi Z – enostepenskem in večstopenjskem – je poljubna nastavitev vrednosti ID-ja osi Z znotraj binarnega obsega 0000–1111 podprta, sistem pa za oba načina ponuja tudi vizualne primere izvedbe, da olajša razumevanje in uporabo za operaterja.
2. Podrobna izvedba na dotikalnem zaslonu JUGAO
Dotikalni zaslon JUGAO je jedro človeško-strojne vmesnika za ročno in avtomatsko delovanje osi Z; logika izvedbe je jasno razlikovana za različne načine dela, poleg tega pa obstajajo posebne metode ravnanja z izjemnimi situacijami in vsakodnevno kalibracijo.
2.1 Metoda ročne izvedbe
Ročna upravljanje osi Z je na voljo le, ko je na dotikalnem zaslonu prikazan določen ikona za ročno upravljanje; če ikona ni prikazana, je ročno upravljanje onemogočeno.
• Pritisnite tipko za naprej, da premaknete Z1 ali Z2 v smeri povečanja vrednosti položaja (stran Y1 ustreza položaju z najmanjšo vrednostjo osi Z, stran Y2 pa položaju z največjo vrednostjo osi Z);
• Pritisnite tipko za nazaj, da premaknete Z1 ali Z2 v smeri zmanjšanja vrednosti položaja; premikanje se takoj ustavi, ko tipko spustite;
• Preklop med Z1 in Z2: Pritisnite tipko za izbiro osi; Z2 se prikaže v modri barvi, kar pomeni, da je Z2 v stanju za ročno upravljanje; če tipko pritisnete še enkrat, se Z2 vrne v črno barvo in ročno upravljanje se ponovno preklopi na Z1.
2.2 Način samodejnega delovanja
Samodejno delovanje osi Z se aktivira z namensko tipko za zagon samodejnega načina na dotikalnem zaslonu JUGAO, pri čemer se pred tem preveri stanje opreme:
• Če se črpalka za olje upogibnega stroja ne zagnete, bo zaslon opozoril operaterja, naj najprej zžene črpalko za olje;
• Če je črpalka za olje v normalnem delovnem stanju, bo pritisk na tipko za samodejni zagon povzročil premik osi Z na prednastavljeno pozicijo, ki ustreza ID0000;
• Kadarkoli pritisnite posvečeno tipko za zaustavitev na zaslonu, se samodejni premik osi Z takoj ustavi.
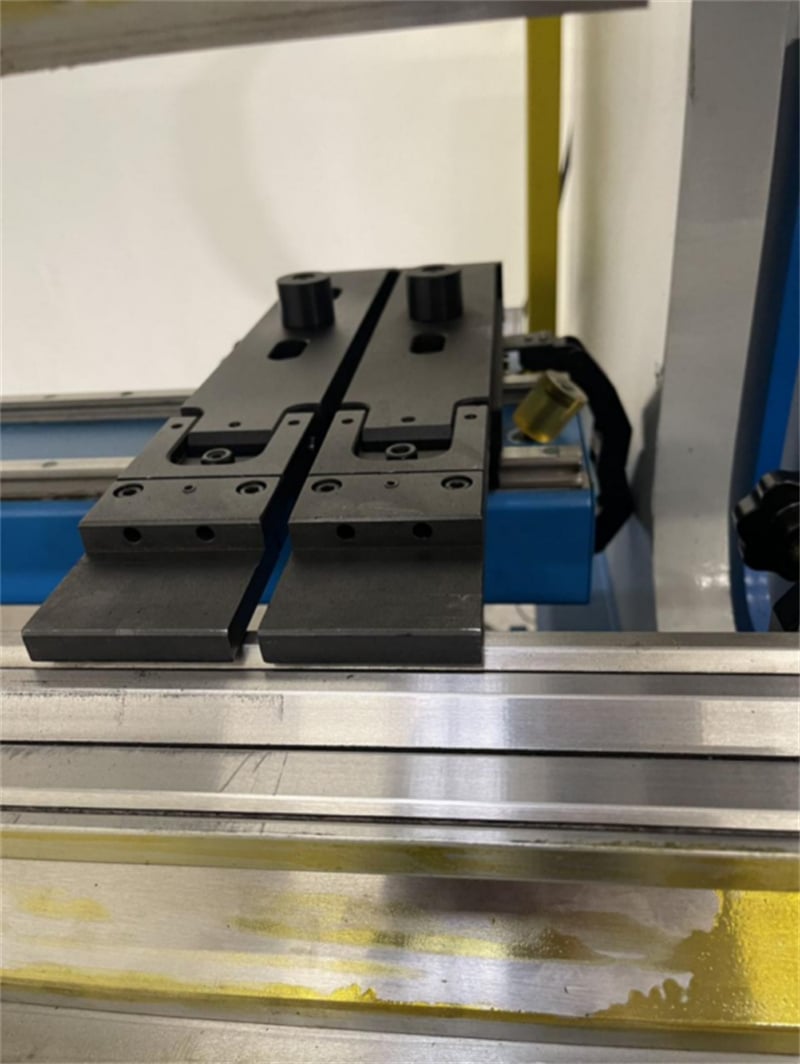
2.3 Ravnanje z izjemami pri trkovnih nesrečah
V primeru trka med zaustavitvenimi prsti Z1 in Z2 med obratovanjem ravnavajte z izjemami v naslednjem vrstnem redu:
1. Najprej preverite, ali ima pogonski modul osi Z alarmni signal; če je alarm sprožen, izklopite napajanje pogonskega modula in ga ponovno vklopite, da ponastavite alarm;
2. Izvedite kalibracijsko operacijo »naučitve« za obe osi Z1 in Z2;
3. Vnesite dejanske trenutne natančne vrednosti položaja Z1 in Z2 na dotikalnem zaslonu ter po potrditvi sistem nadaljuje z normalnimi nadaljnjimi operacijami.
2.4 Ključni zahtevi za učenje (kalibracijo) v smeri osi Z
Pravilno učenje (kalibracija) v smeri osi Z je temeljni predhodnik za normalno in natančno delovanje celotnega regulatorja osi Z, in to operacijo je treba izvesti v naslednjih primerih:
1. Prva preskusna obratovanja in vzpostavitev novega gugalnega stiskalnika z regulatorjem osi Z modela DA53T/DA58T;
2. Kakršna koli nenamerna trk z ustavitvenimi prsti osi Z ali drugi nenormalni mehanski udari na os Z.
Pomembno je opozoriti, da regulator osi Z ima funkcijo pomnilnika ob izključitvi napajanja: parametri položaja osi Z, določeni pri kalibraciji, se bodo avtomatsko shranili v sistemu. Po izključitvi in ponovnem vklopu opreme operater ne potrebuje ponovno izvesti operacije učenja (kalibracije), saj sistem lahko neposredno uporabi shranjene parametre za delovanje.

