















































Koks yra CNC keturrutulio plokščių ritinėjimo automatinio įrenginio veikimo principas?
Automatinis CNC keturgriovės plokščių ritinėjimo staklių plokščių ritinėjimo procesas bei jų lengvumas valdyti ir stabilumas palyginti su trimis griovėmis staklėmis kyla iš jų unikalaus sistemos dizaino. Keturgriovė struktūra, optimizuota mechaninė išdėstymo ir valdymo logika, leidžia visiškai kontroliuoti plokštės išlyginimą, spaustuvą, pirminį lenkimą ir ritinėjimą, todėl ji yra puiki efektyvaus cilindrinio formavimo sprendimas. Pirkimų agentams ir gamyklos vadovams šio principo supratimas yra būtina sąlyga tiksliai įvertinti įrangos našumą ir gamybos efektyvumą.
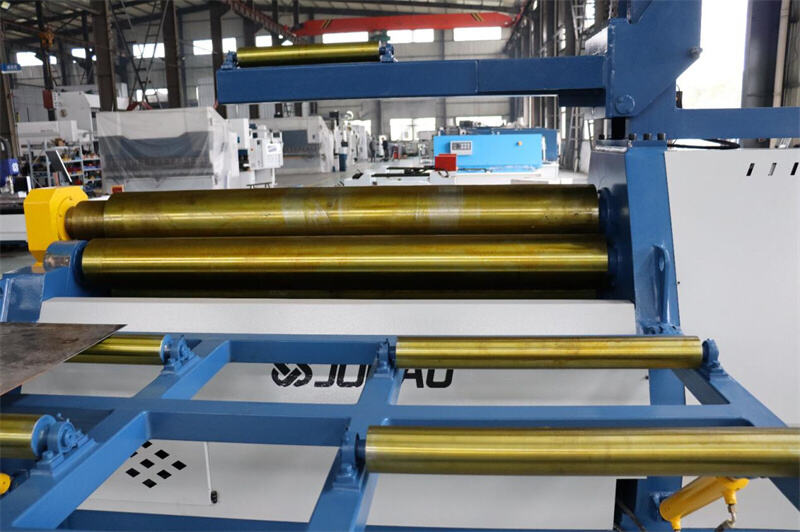
CNC keturgriovės plokščių ritinėjimo staklių pagrindinė konstrukcija
CNC keturgriovės plokštumos ritinėjimo staklių automatinio ritinėjimo principas prasideda aiškiu ritinėlių darbo pasidalijimu: viršutinis ritinėlis varo sukimosi judėjimą, apatinis ritinėlis spaustuvo ir pozicionuoja plokštumą, o šoniniai ritinėliai valdo lenkimo spindulį – jie ne tik remia, bet ir yra pagrindinis plokščių transformavimo į išlenktas paviršius elementas. Būtent aktyvus šoninių ritinėlių kreivumo valdymas suteikia keturgriovėms staklėms tikslumą, kuris žymiai viršija paprastų ritinėjimo įrenginių tikslumą jų automatinėje plokštumos ritinėjimo funkcijoje.
Plokščiosios plokštės lygiavimas
Keturgubo ritinėlio plokščių lenkimo mašinų valdymo paprastumo raktas yra jų aukštos kokybės plokščių išlyginimo galimybės. CNC keturgubo ritinėlio sistemoje plokštė pradėjus apdorojimą tvirtai suveržiama tarp viršutinio ir apatinio ritinėlių. Šis suveržimo veiksmas užtikrina, kad medžiaga visą ritinėjimo procesą būtų patikimai kontroliuojama, taip veiksmingai neleidžiant šoniniam nuokrypiui. Tai reiškia, kad mašina gali lengvai pasiekti tikslų išlyginimą ir išlaikyti pastovią centrinę liniją nuo pradžios iki pabaigos – ši pranašumą ypač akivaizdus apdorojant ilgas ar sunkias plokštes.
Priešlenkimo principas
Priešlenkimas yra lemiamas, nes jis nulemia cilindro galų formavimo kokybę. Be priešlenkimo tiesiosios dalys išliks abiejuose lakštinio metalo galuose, tampa našta tolesniam apdorojimui. Keturių ritulinės lenktuvės unikali savybė ta, kad ji gali atlikti priešlenkimą abiejuose galuose prieš pagrindinį rituliuojamąjį procesą ir po jo, taip minimaliai sumažindama likusias tiesiąsias kraštines. Priešingai, tradicinės trijų ritulinės mašinos dažnai nepajėgia to pasiekti. Būtent tai ir yra keturių ritulinės sistemos paslaptis, leidžianti gaminti taisyklingesnius cilindrus – iš formavimo efektyvumo požiūrio priešlenkimo funkcija sumažina korėkcijos etapus ir tikrai leidžia automatizuotą gamybą.
Tolydus rituliuojamasis procesas
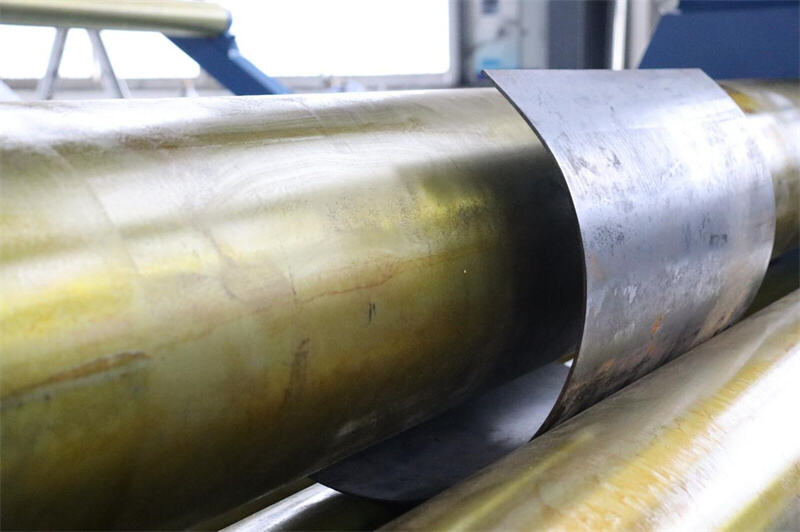
Pagrindinis ritinėjimo etapas veikia pagal paprastą logiką: šoniniai ritiniai palaipsniui juda aukštyn, verčiant lako metalo lakštą nuolat lenktis, padidinant kreivumą, kol jis įgauna pageidaujamą cilindro formą. Šios technologijos pagrindas yra progresyvi plastinė deformacija – lakštinis metalas nuolat praeina tarp ritinių, palaipsniui kaupdamas kreivumą, o ne būna priverstinai suformuojamas vienu kartu. Būtent šis kontroliuojamas kelio valdymas leidžia keturių ritinių lakštų lenkimo staklėms pasiekti stabilų ritinėjimą be žmogaus įsikišimo. Vartotojams tai reiškia, kad įranga veikia „nukreipiamuoju“, o ne „priverstiniu“ būdu, todėl užtikrinama tikslumas ir pakartojamumas.

Pašalinkite plokščius galus
Po pagrindinio ritinėjimo lakšto galinis kraštas dažnai išlieka tiesus. Atvirkštinio ritinėjimo tikslas – šis defektas pašalinamas antrinio lenkimo būdu, taip pagerinant viso cilindro apvalumą. Daugelis klientų pradžioje nesupranta, kodėl reikalingas atvirkštinis ritinėjimas, tačiau principas paprastas – geriau pritaikyti sujungimus ir tobulinti formavimą. Būtent todėl keturgriovės plokščių lenkimo mašinos yra labai populiarios taikymuose, kur reikalaujama aukšto apvalumo ir sujungimų kokybės.
Tikslus valdymas ir kompensacija
Gerų ritinėjimo rezultatų pasiekimas priklauso ne tik nuo įrangos galios, bet taip pat, o galbūt net svarbiau, nuo tikslaus valdymo sistemos. CNC keturių ritinėlių plokščių lenkimo mašinoje formavimo tikslumas nustatomas pagal tris pagrindinius veiksnius: ritinėlių poslinkis nulemia formavimo geometriją; hidraulinis valdymas užtikrina stabilų ir pakartotinį veikimą; kompensacinės reguliavimo funkcijos pašalina skirtumus tarp abiejų mašinos pusių. Realiojoje gamyboje netolygūs siūlių tarpai dažnai yra tiesioginis šios problemos pasireiškimas – jei viena korpuso pusė užsidaro tankiau, tai paprastai reiškia, kad ritinėliai nėra visiškai lygiagretūs arba pasvirėsios pusės poslinkis neatitinka fiksuotosios pusės poslinkio. Šiuo metu į žaidimą įeina kompensacinis mechanizmas: reguliuojant ritinėlių tarpusavio padėtis, atkuriamas sistemos balansas, dėl ko pagerėja ritinėjimo tikslumas. Tai yra automatinės ritinėjimo sistemos esmė – našumas kyla iš kontroliuojamos geometrijos, o ne tik iš hidraulikos.
Kodėl rankinis bandymo ritinėjimas yra būtinas automatiniam ritinėjimui?
CNC keturgubo ritinio plokščių lenkimo staklių automatinis ritinėjimo procesas neapima automatinio trajektorijos apskaičiavimo, kaip galima būtų įsivaizduoti. Vietoj to jis remiasi paprasta logika: „rankinis bandymo ritinėjimas → pozicijų įrašymas → programos išsaugojimas → automatinis pakartojimas“. Operatorius pirma rankiniu būdu ritinėja plokštę, kad rastų tinkamą ritinio poslinkį esamajam medžiagų tipui. Kai valdymo sistema įrašo šias pozicijas, staklės gali tiksliai atkurti šį sėkmingą ritinėjimo maršrutą. Trumpai tariant, automatinis ritinėjimas = patikrinto sprendimo automatinis pakartojimas. Tai yra itin svarbu vartotojui: staklės nepačios sugeneruoja parametrų; jums reikia pateikti tinkamą programą stabiliai ir efektyviai veikti.

