















































ESA S530 მოღუნვის მიმდევრობის გამოთვლა: პრინციპები, ოპერირება და გამოყენების მითითებები
Სარჩევი
• შესავალი
• ავტომატური გადაღუნვის მიმდევრობის გამოთვლა (სავალდებულო ფუნქცია)
◦ გამოთვლის ინტერფეისი
◦ ოპტიმიზაციის შედეგები
◦ სიმულაციის ფუნქცია
◦ იარღვნის/მხარდაჭერის მორგება
• ხელით გადაღუნვის მიმდევრობის გამოთვლა (სავალდებულო ფუნქცია)
◦ ოპტიმიზაციის პროცესის შედეგები
◦ სიმულაციის ოპერაცია
◦ საკიდრის/მხარდაჭერის კონფიგურაცია
◦ ზეწოლის მიმდევრობის მოდიფიკაცია
• ყუთის ზეწოლის ოპერაციის ნაბიჯები
• ხშირად დასმული კითხვები (FAQ)
◦ როგორ აუმჯობესებს ESA S530 ზეწოლის პროცესს?
◦ შემიძლია თუ არა ზეწოლის მიმდევრობის ხელით შეცვლა ESA S530-ში?
◦ რა უნდა გავაკეთო, თუ შეცდომა მოხდა ESA S530-ის ზეწოლის მიმდევრობის გამოთვლის დროს?
• დასკვნა
Შესავალი
Მეტალის დამუშავების სფეროში ზუსტი გადაღუნვა არის სამუშაო ნაწილის ხარისხის უზრუნველყოფის ძირეული ელემენტი, ხოლო ESA S530-ის გადაღუნვის თანმიმდევრობის გამოთვლის ფუნქცია სწორედ ამ მიზნის მისაღწევად განკუთვნილი მთავარი ტექნოლოგიაა. ESA S530 სისტემის ეს ძირეული თვისება ინტელექტუალურად ოპტიმიზაციას უწევს ლისტის გადაღუნვის თანმიმდევრობას, შეამცირებს ექსპლუატაციის შეცდომებს და მასალის დანახარჯს, ასევე უზრუნველყოფს, რომ სამუშაო ნაწილები სრულად დათმონ დიზაინის სპეციფიკაციებს. როგორც წარმოების ეფექტიანობის ამაღლებისთვის, ასევე დამუშავების ხარისხის სტაბილურობის შესანარჩუნებლად, ეს ფუნქცია არაჩანაცვლებელ როლს ასრულებს. ამ სტატიაში სრულად გაანალიზებულია ESA S530-ის გადაღუნვის თანმიმდევრობის გამოთვლის მუშაობის ლოგიკა, მთავარი უპირატესობები და პრაქტიკული ექსპლუატაციის მეთოდები, რაც მოწყობილობის დამწყებ მომხმარებლებს და გამოცდილ სპეციალისტებს შესასწავლად და პროცესების გასაუმჯობესებლად მოაწოდებს პრაქტიკულ მითითებებს და ეხმარება მეტალის დამუშავების საერთო დონის ამაღლებაში.
Ავტომატური გადაღუნვის თანმიმდევრობის გამოთვლა (სავალდებულო არაა)
Ავტომატური გადაღუნვის მიმდევრობის გამოთვლის გამშვები გზა მარტივია: დაიწყეთ პროცესი ნაგულისხმევი ნახაზის ინტერფეისიდან და დააჭირეთ [გამოთვლა] ღილაკს, რათა შეხვიდეთ ოპერაციის ინტერფეისში. ეს რეჟიმი ახდენს გადაღუნვის მიმდევრობის დამოუკიდებელ გადამუშავებას რიცხვითი კონტროლის ტექნოლოგიის საშუალებით, ხოლო ხელით შეყვანის რეჟიმთან თანასწორობის შენარჩუნებით, რათა გამოადაპტიროთ სხვადასხვა წარმოების სცენარიულ მოთხოვნებთან.
Გამოთვლის ინტერფეისი
Გამოთვლის ინტერფეისი არის "დაგეგმვის ცენტრი" მოღუნვის წინ. ის არ აჩვენებს მხოლოდ ნაგულისხმევად ნამუშევრის მოღუნვის სიმულაციის მდგომარეობას რეალურ დროში, არამედ ნათლად აჩვენებს მოღუნვის მანქანის ძირეული კომპონენტების - ჭიმვის, ზარის და შემჩერის პოზიციურ ურთიერთობას, რაც დახმარება ოპერატორებს აღჭურვილობისა და ნამუშევრის შორის ურთიერთ პოზიციის წინასწარ გაგებაში. ინტერფეისის მარჯვენა მხარეს განთავსებულია სამი ქვე-ფანჯარა, რომლებიც დინამიურად აჩვენებს ნამუშევრის შემობრუნების კუთხეს და გადაბრუნების რაოდენობას. ამასთან, ის აღჭურვილია "სრული ამონახსნის ძებნის" ფუნქციით, რომელიც შეიძლება გაიაროს ყველა შესაძლო მოღუნვის ტრაექტორიაზე და მოგვცეს სრული მონაცემთა მხარდაჭერა შემდგომი ოპტიმიზაციისთვის.
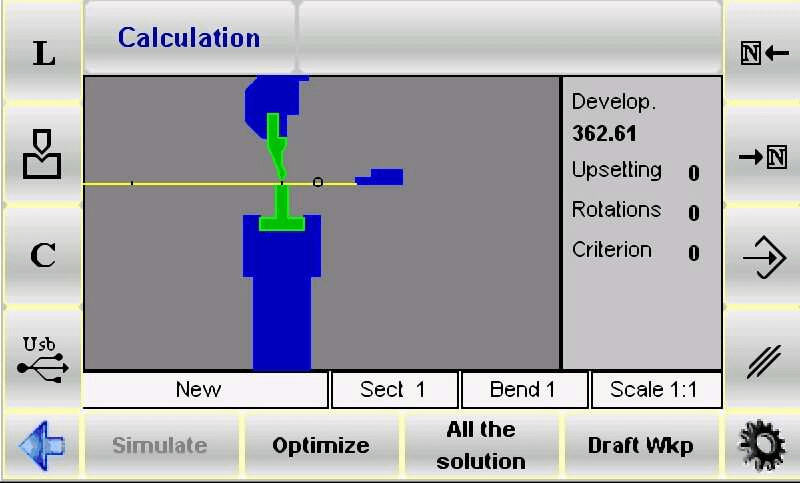
Სისტემა უზრუნველყოფს დამუშავების უსაფრთხოებას და ეფექტურობას ციფრული კონტროლის ლოგიკის საშუალებით: ის ყოველთვის უზრუნველყოფს ლистის დიდი ზოლის კონტროლირებად დიაპაზონში შენარჩუნებას ოპერატორის მიერ, რათა შეამციროს ექსპლუატაციის რისკები. ოპერატორებს შეუძლიათ გადაახვიონ გამოთვლის სტანდარტები წარმოების საჭიროებების მიხედვით და თავისუფლად გადართონ ავტომატურ და რუკალურ რეჟიმებს შორის, რათა გააუმჯობესონ პროცესის ადაპტაცია.
Ავტომატური და რუკალური რეჟიმების შორის კოორდინაციის ლოგიკა
ESA S530-ის მოღუნვის მიმდევრობის გამოთვლა არ ხდება ერთ რეჟიმში, არამედ ხდება "ავტომატური + რუკალური" ორმაგი რეჟიმის კოორდინაციით, რათა უზრუნველყოფილი იქნეს მოქნილი დამუშავება:
• ავტომატური რეჟიმი: რიცხვითი კონტროლის ალგორითმებზე დაყრდნობით, სისტემა დამოუკიდებლად ასრულებს ოპტიმალური მოღუნვის მიმდევრობის გამოთვლას ხელით ჩარევის გარეშე. [ოპტიმიზაცია] ღილაკის დაჭერის შემდეგ, სისტემა ავტომატურად გამორიცხავს იმ სქემას, რომელიც აღემატება ეფექტიანობით და აქვს უმცირესი შეცდომა, დეტალის პარამეტრებზე დაყრდნობით (მაგალითად, მასალა, სისქე, მოღუნვის კუთხე).
• ხელით რეჟიმი: ოპერატორები შეძლებენ დამოუკიდებლად განსაზღვრონ ნაწილობრივ ან სრულად მოღუნვის ეტაპები და შეასწორონ ისინი ექსკლუზიური ფუნქციური ღილაკების საშუალებით: ღილაკი [მოღუნვა] გამოიყენება მონიშნული მოღუნვის მოქმედების დასაბლოკად, ხოლო ღილაკი [შებრუნება] კი კონტროლის შესაძლებლობას იძლევა დეტალის შებრუნების კუთხის; მორგებული პარამეტრების შევსების შემდეგ, დააჭირეთ [ოპტიმიზაცია] ღილაკს და სისტემა შეურთავს ხელით მითითებულ პარამეტრებს ავტომატურ გამოთვლაში, რათა შექმნას ისეთი სქემა, რომელიც ითვალისწინებს როგორც "ოპერატორის გადაწყვეტილებას", ასევე "ტექნოლოგიურ სრულყოფას".
Ოპტიმიზაციის შედეგები
Ოპტიმიზაციის შედეგების უკუკავშირის ლოგიკა ნათელია, რაც საშუალებას აძლევს ოპერატორებს სწრაფად გააკეთონ დასკვნები და გადაწყვიტონ:
• როდესაც სქემა შეუსაბამოა: სისტემა გამოაქვს "ამონახსნი არ არსებობს" შეტყობინება, რომელიც ახსენებს ოპერატორს შეამოწმოს პრობლემები (მაგ., ურთიერთსაწინააღმდეგო მოღუნვის კუთხეები, კომპონენტების ჩარევა ერთმანეთში და ა.შ.) ან სცადოს მოღუნვის თანმიმდევრობის გადატარება. თუ ნამუშევარში შეჯახების რისკი არსებობს, ეს ზონა ინტუიტიურად იქნება მონიშნული შეჯახების ადგილას ფერის შეცვლით (მაგ., წითლად გამოკვეთა).
• სპეციალური ოპერაციების დაშვება: თუ შეჯახება მხოლოდ "არაგანადგურებელი ჩარევაა" (მაგ., დროებითი კონტაქტი, რომელიც არ ზიანებს ნამუშევარს ან მოწყობილობას), ოპერატორს შეუძლია იგნორირება შეტყობინების და გააგრძელოს მოღუნვის პროცესი.
• როდესაც სქემა შესაბამისია: სისტემა გამოაქვს "ამონახსნი ნაპოვნია" და სთავაზობს ოთხ ძირეულ სამუშაო ვარიანტს:
ა. [შეჩერება]: ოპტიმიზაციის პროცესის შესაჩერებლად, რათა მიმდინარე სქემის პარამეტრები ზუსტად დაგეხვიოთ (მაგ., დაღუნვის კუთხის გასწორება, მხარდაჭერის პოზიციის შეცვლა).
ბ. [გაგრძელება]: სხვა შესაძლო სქემების უწყვეტი ძიება, სანამ შესაბამისი გზები არ ამოიწურება. თუ ყველა ვარიანტი შემოწმდა და შესაბამისი სქემა ვერ მოიძებნა, ბოლოს გამოჩნდება "ამონახსნი არ არსებობს".
გ. [სიმულაცია]: დაღუნვის მიმდევრობის სიმულაციის დაწყება. ოპერატორებს შეუძლიათ პროცესის გაგრძელება [გაგრძელება] ღილაკით ან სიმულაციის შეწყვეტა [შეჩერება] ღილაკით, რათა დაღუნვის პროცესი რეალურ დროში დააკვირდნენ.
დ. [დადასტურება]: მიმდინარე გამოთვლილი დაღუნვის პარამეტრების (კუთხე, სიჩქარე, მხარდაჭერის პოზიცია) პროგრამაში შენახვა, რათა პირდაპირ გამოიყენონ ფაქტობრივ დამუშავებაში.
Სიმულაციის ფუნქცია
Სიმულაციის ფუნქცია წარმოადგენს "გადახედვის ბმულს", რომელიც უზრუნველყოფს დაღუნვის სიზუსტეს, ხოლო ოპერაციების ნაბიჯები ინტუიციური და კონტროლირებადია:
1. დააწექით [Simulate] ღილაკს, ინტერფეისი გამოსახავს ბაზის ნაგულის მდგომარეობას, რომელიც უნდა დაკეცოთ, რათა განსაზღვროთ პირველი დაკეცვის საწყისი პოზიცია.
2. აირჩიეთ შესაბამისი მხარდაჭერის სტრუქტურა [Bearing/Support] ღილაკის საშუალებით. უნდა დარწმუნდეთ, რომ მხარდაჭერის პოზიციაში არ არის შეჯახების რისკი და შეესაბამება მოწყობილობის ღერძის მოძრაობის დიაპაზონის ლიმიტებს (მაგ. X-ღერძის და R-ღერძის სვლები).
3. დააწექით [Continue] ღილაკს, სისტემა შეასრულებს პირველ დაკეცვის მოქმედებას და გამოსახავს ნაგულის ფორმას დაკეცვის შემდეგ; შემდგომი დაკეცვისთვის საჭიროა ამ ნაბიჯის გამეორება, რათა პროცესი დახვეწილად გააგრძელდეს.
4. თუ საჭიროა დეტალების დასაკვირვებლად პაუზა გააკეთოთ, შეგიძლიათ დააწექით [Stop] ღილაკს; თუ უკან დასაბრუნებლად და შესწორებისთვის საჭიროა (მაგ. წინა ნაბიჯის მხარდაჭერის პოზიციის შესწორება), შეგიძლიათ უკან დაბრუნდეთ წინა ნაბიჯზე [Previous] ღილაკის საშუალებით.
5. დააწექით [გაგრძელება] ღილაკს მანამ, სანამ ყველა ზეწოლის ეტაპის სიმულაცია არ დასრულდება. ამ დროს ხელახლა გამოჩნდება [სიმულაცია] ღილაკი, რაც სიმულაციის პროცესის დასრულებაზე მიუთითებს.
Საყრდენი/მხარდაჭერის მორგება
Საყრდენი/მხარდაჭერის მორგება არის საშუალება ნამუშევრის დეფორმაციის თავიდან ასაცილებლად და ზეწოლის სტაბილურობის უზრუნველსაყოფად. ოპერაცია უნდა შესრულდეს შემდეგი პროცედურით:
1. დააწექით [სიმულაცია] ღილაკს, ინტერფეისზე გამოჩნდება პირველად ზეწოლის დროს გასაზედი ბრტყელი ნამუშევარი, რაც ადგენს საწყის დამუშავების მდგომარეობას.
2. დააწექით [საყრდენი/მხარდაჭერა] ღილაკს, რათა შეცვალოთ მხარდაჭერის ტიპი - შეგიძლიათ აირჩიოთ "პირველი მხარდაჭერა", "მეორე მხარდაჭერა" ან "ნამუშევრის მხარდაჭერა". სისტემა ავტომატურად განსაზღვრავს ლოკატორის მოძრაობის შესაძლებლობას: ლოკატორი მხოლოდ მაშინ მოძრაობს სამიზნე მხარდაჭერის პოზიციაში, როდესაც არ არსებობს შეჯახების რისკი და დაკმაყოფილებულია მოწყობილობის ლიმიტის პირობები.
3. დააწექით ღილაკს [გაგრძელება], რომ ნახოთ ნამუშევრის მდგომარეობა პირველი ზეწოლის შემდეგ და დაადასტუროთ, აკმაყოფილებს თუ არა მხარდაჭერის ეფექტი მოთხოვნებს.
4. გააგრძელეთ ღილაკის [გაგრძელება] დაჭერით, რათა შეიყვანოთ მეორე ზეწოლის პარამეტრები და მორგებულად აირჩიოთ მხარდაჭერის ტიპი (ლოკატორის მოძრაობას კვლავ უნდა აკმაყოფილებდეს ორივე პირობა: "არ არის შეჯახება + შესაბამისობა ლიმიტებთან").
5. პროცესის განმავლობაში თქვენ შეგიძლიათ დააწექით ღილაკს [შეჩერება], რათა ნებისმიერ მომენტში შეაჩეროთ სიმულაცია, ან დააწექით ღილაკს [წინა] წინა ნაბიჯზე დასაბრუნებლად და მხარდაჭერის პარამეტრების გასასწორებლად.
6. გააგრძელეთ სიმულაცია მანამდე, სანამ ისევ არ გამოჩნდება ღილაკი [სიმულაცია], რაც ნიშნავს, რომ მხარდაჭერის პარამეტრების სრული პროცესის ვერიფიკაცია დასრულდა.
Უნდა აღინიშნოს, რომ ეს ფუნქცია განთავსებულია რიცხვითი პროგრამის ზედა მარჯვენა კუთხეში, მყესის ტიპის ხატულასთან ერთად. სისტემა ავტომატურად შეასწორებს X ღერძის და R ღერძის პოზიციის გადახრას; თუ მიმდინარე პროგრამა "გრაფიკული ტიპის" პროგრამაა, [Bearing/Support] ღილაკი ვერ გამოიყენება რიცხვით მართვის რეჟიმში და მხარდაჭერის კორექტირება უნდა შესრულდეს სიმულაციის ინტერფეისზე გადართვით.
Ხელით მყესის მიმდევრობის გამოთვლა (არჩევითი ფუნქცია)
Ხელით მოღუნვის მიმდევრობის გამოთვლა შესაფერისია იმ შემთხვევებისთვის, როდესაც საჭიროა პერსონალიზებული კორექტირება. ჩართვის მიმდევრობა იგივეა, რაც ავტომატურ რეჟიმში: უნდა დააწექით [გამოთვლა] ღილაკს ნამუშევრის ნახაზის ინტერფეისიდან, რათა შეხვიდეთ მუშაობის პროცესში. ინტერფეისი დეტალურად იმიტირებს მთელ მოღუნვის პროცესს, რომელიც შეიცავს მოღუნვის მანქანის ზედა და ქვედა სხეულის, მაცხრის, დიეს, ლოკატორის და ნამუშევრის ვიზუალურ წარმოდგენას მოღუნვამდე; მარჯვნივ მდებარე სამი პანელი დინამიურად აჩვენებს ნამუშევრის შემობრუნების რაოდენობას და მისი მობრუნების კუთხეებს გამოთვლის პროცესში (დეტალური სქემებისთვის იხილეთ ინტერფეისის აღწერა თავში "ავტომატური მოღუნვის მიმდევრობის გამოთვლა").
Ხელით მოღუნვის მიმდევრობის ძებნა
Ხელით ძებნის რეჟიმის საშუალება არის "ხელით მოღუნვის ტრაექტორიის მიყვანა", და მოქმედების ნაბიჯები შემდეგია:
1. ისარების გამოყენებით


მიმოიხილეთ ყველა მოღუნვის ნაბიჯი და მონიშნეთ სამიზნე დონე, რომელიც საჭიროებს კორექტირებას.
2. დააჭირეთ [გამოკუპვა] ღილაკს სამიზნე გამოკუპვის დონეზე, რათა იძულებით დაიბლოკოთ გამოკუპვის მოქმედება; თუ გჭირდებათ გაუქმება, ისევ დააჭირეთ [გამոკუპვა] ღილაკს.
3. დააჭირეთ [შებრუნება] ღილაკს, რათა დაარეგულიროთ ნამუშევრის შებრუნების კუთხე და უზრუნველყოთ შემდგომი გამოკუპვის შესაბამისობა მიმდინარე ეტაპის პოზიციასთან.
4. ყველა აუცილებელი გამოკუპვის იძულებითი პარამეტრების დასრულების შემდეგ დააჭირეთ [ოპტიმიზაცია] ღილაკს. სისტემა გამოთვლის საბოლოო სქემას ხელით მითითებული მიმდევრობის საფუძველზე, რომელიც გაერთიანებულია ტექნოლოგიური შეზღუდვებთან (მაგ., შეჯახების გარეშე, ღერძის სვლის ლიმიტი).
Ოპტიმიზაციის პროცესის შედეგები
Ხელოვნურ რეჟიმში ოპტიმიზაციის შედეგების აღქმა შეესაბამება ავტომატურ რეჟიმში არსებულს, მაგრამ უფრო მეტად არის დამაგრებული "ხელოვნური კორექტირების ადაპტაციაზე"
• თუ ნამუშევრის კონფიგურაცია (მაგალითად, ხელით მითითებული მოღუნვის მიმდევრობა) ვერ დამუშავდება, სისტემა გამოაქვს „ძალით ამოხსნა“-ს შეტყობინება. ოპერატორმა უნდა ხელით მოძებნის ფუნქციის საშუალებით თავიდან დააგეგმოს პრობლემური ეტაპები (მაგ., ერთმანეთის წინააღმდეგობაში მყოფი მოღუნვის კუთხეები, არასწორი მხარდაჭერის პოზიციები).
• მანქანის კომპონენტების შეჯახების პოტენციური რისკი აღინიშნება ფერის შეცვლით (მაგ., ნარინჯისფერი გაფრთხილება), რათა დაეხმაროს ოპერატორებს მიმდევრობის გადაყენებაში ან მხარდაჭერის შეცვლაში.
• თუ შეჯახებას ზიანის რისკი არ ახასიათებს (მაგ., ნამუშევრის წიბოსა და დანის შორის დროებითი კონტაქტი), შესაძლებელია მოღუნვის ძალით განხორციელება; თუ სისტემამ იპოვა შესაბამისი ვარიანტი, გამოჩნდება შეტყობინება „ამონახსნი ნაპოვნია“, და ოპერატორს შეეძლება აირჩიოს [შეჩერება] დასაგეგმრად დასაყოვნებლად ან [დადასტურება], რათა გამოთვლილი მნიშვნელობები პროგრამაში შეიტანოს.
Სიმულაციის ოპერაცია
Ხელით ჩართვის რეჟიმის სიმულაციის პროცესი ემთხვევა ავტომატური რეჟიმის სიმულაციის პროცესს. ძირეული განსხვავება იმაში მდგომარეობს, რომ "სიმულაცია ხელით მითითებული მიმდევრობის საფუძველზე ხდება":
1. დააწექით [სიმულაცია] ღილაკს, რათა ნახოთ სარკმლისებური ნაგულის მდგომარეობა, რომელიც უნდა დამუშავდეს (საწყისი მდგომარეობა ემთხვევა ხელით მითითებულ პირველ მოღუნვის კომპლექტს).
2. დააწექით [მუხლი/მხარდაჭერა] ღილაკს, რათა აირჩიოთ მხარდაჭერის ტიპი, რათა არ მოხდეს შეჯახება და დაცული იქნეს ღერძის მოძრაობის ლიმიტი.
3. დააწექით [გაგრძელება] ღილაკს, რათა შეასრულოთ პირველი მოღუნვა და განაახლოთ ეს ნაბიჯი შემდგომი მოღუნვებისთვის; შეგიძლიათ დააწექოთ [შეჩერება] ღილაკს პაუზის დასაყენებლად ან [წინა] ღილაკს, რათა უკან დაბრუნდეთ და შეამოწმოთ ხელით მითითებული მიმდევრობის ლოგიკურობა.
4. გააგრძელეთ სიმულაცია მანამ, სანამ [სიმულაცია] ღილაკი ხელახლა არ გამოჩნდება. მოღუნვის მთელი პროცესის პრობლემების გარეშე დადასტურების შემდეგ შეგიძლიათ გამოიყენოთ ფაქტობრივი დამუშავებისთვის.
Მუხლი/მხარდაჭერის კონფიგურაცია
Ხელით რეჟიმში საყრდენის/მხარდაჭერის კონფიგურაციას აქვს იგივე ოპერაციის ნაბიჯები, რაც ავტომატურ რეჟიმში, თუმცა უნდა გაითვალისწინდეს, რომ "მხარდაჭერა უნდა შეესაბამებოდეს ხელით მითითებულ მოღუნვის მიმდევრობას":
• ლოკატორის მოძრაობა უნდა აკმაყოფილებდეს ორივე პირობას: "ხელით დაყენებული მოღუნვის პოზიცია" და "შეჯახების არქონა", რათა თავიდან აიცილოს მიმდევრობის ჩასწორებით გამოწვეული მხარდაჭერის შეცდომა.
• თუ საჭიროა მხარდაჭერის ტიპის შეცვლა, ის უნდა შესრულდეს სიმულაციის ინტერფეისში (საყრდენის/მხარდაჭერის ფუნქცია არ უჭერს მხარს გრაფიკულ პროგრამებს რიცხვითი კონტროლის რეჟიმში), რათა უზრუნველყოს მხარდაჭერისა და მოღუნვის ნაბიჯების შესაბამისობა.
Მოღუნვის მიმდევრობის შეცვლა
Მოღუნვის მიმდევრობის ოპტიმიზაციის შემდეგაც კი, ESA S530-ს შეუძლია გაუწიოს მოქნილი კორექტირება დროებითი ტექნოლოგიური ცვლილებების მოთხოვნების დასაკმაყოფილებლად:
1. იყენეთ ისრების ღილაკები ყველა მოღუნვის ნაბიჯის დასათვალიერებლად და იმ მიზნის მოღუნვის განსაზღვრისთვის, რომელიც საჭიროებს შეცვლას.
2. დააწექით [გამოხრის] ღილაკს, რომ გააუქმოთ გამოხრის ოპერაცია და ხელახლა შეარჩიოთ ახალი გამოხრის მიმდევრობა (ან შეცვალოთ შემობრუნების კუთხე).
3. შეცვლის დასრულების შემდეგ შესაძლებელია იმიტაციის ხელახლა დაწყება ახალი მიმდევრობის შესაბამისობის შესამოწმებლად, რათა დარწმუნდეთ, რომ შესწორებული პროცესი ზუსტი და ეფექტურია.
Ყუთის გამოხრის ოპერაციის ნაბიჯები
Ყუთის გამოხრა ლითონის დამუშავების ტიპიური სცენარია. ამ პროცესში ESA S530-ის გამოხრის მიმდევრობის გამოთვლა უნდა მიჰყვეს „პროგრამების ცალ-ცალკე შესრულების“ ლოგიკას – რადგან რიცხვითი კონტროლის პროცესს შეუძლებელია პირდაპირ გაშლა გამოხრილი ყუთის ბრტყელ ფირის სახით, ოპერატორმა ორი დამოუკიდებელი გამოხრის პროგრამა უნდა შექმნას:
• პროგრამა 1: გამოიყენება ჰორიზონტალური გამოხრისთვის, რომელიც განსაზღვრავს ყუთის გვერდის გამოხრის კუთხეს და მდებარეობას.
• პროგრამა 2: გამოიყენება ვერტიკალური გამოხრისთვის, რომელიც განსაზღვრავს ყუთის ზედა/ქვედა ნაწილის გასწვრივ გამოხრის პარამეტრებს.
Ამ ორი პროგრამის თანმიმდევრულად შესრულებით, შესაძლებელია ყუთის ზუსტი ფორმის მიღება. გარდა ამისა, მრავალ-სექციური პროგრამების შესრულების დროს ESA S530-მ ავტომატურად უპირატესობა მისცემს უფრო ვიწრო ლისტის სიგანის მქონე სექციის დამუშავებას, რაც ამცირებს ფურცლის დეფორმაციის რისკს და ამაღლებს მოღუნვის ეფექტიანობას.
Სექციის დამატება
Ყუთის მოსაღუნვად ახალი დამუშავების სექციის დასამატებლად, შეასრულეთ შემდეგი ნაბიჯები:
1. დააჭირეთ შესაბამის ფუნქციურ კლავიშს (იხილეთ მოწყობილობის ოპერაციული პანელის აქსესუარი ხატულაზე) სექციის მართვის მენიუს გასახსნელად.

2. მენიუში აირჩიეთ "შეცვალეთ სექცია" ვარიანტი. სისტემა ავტომატურად შექმნის ახალ სექციას და ოპერატორს შეეძლება მოარგოს მოღუნვის პარამეტრები (მაგ., კუთხე, მხარდაჭერის პოზიცია) ამ სექციისთვის.
Სექციის გაუქმება
Არასაჭირო სექციის წასაშლელად, შესრულდეს შემდეგი პროცედურა:
1. ისარების გამოყენებით გადაიტანეთ მიმართულება სამიზნე სექციაზე და დაადასტურეთ სექციის ნომერი და პარამეტრები.
2. გახსენით სექციის მართვის მენუ და აირჩიეთ „სექციის გაუქმება“.
3. სისტემა ამოიღებს სექციას, ხოლო პროგრამა ავტომატურად დაბრუნდება „1-ლი სექციის 1-ლ მოღუნვაზე“, რათა უზრუნველყოს შემდგომი პროცესის უწყვეტობა.
Ხშირად დასმული კითხვები (FAQ)
Როგორ აუმჯობესებს ESA S530 მოღუნვის პროცესს?
ESA S530 ხელახლა აგებს მოღუნვის პროცესს „ავტომატური მოღუნვის მიმდევრობის გამოთვლის“ საშუალებით: ეს აღმოფხვრის ხელით მრავალჯერად საცდელ-შეცდომით მუშაობის აუცილებლობას (როგორიცაა მოღუნვის მიმდევრობის რამდენჯერადი კორექტირება ტრადიციულ პროცესებში), მნიშვნელოვნად შეამცირებს მოწყობილობის დახვეწის დროს; ამასთან, სისტემა აოპტიმალურს ხდის ტრაექტორიას რიცხვითი კონტროლის ალგორითმების საშუალებით, ამცირებს ოპერაციულ შეცდომებს, ამაღლებს ლითონის ფორმირების სრულ ეფექტურობას და ზუსტად და ამცირებს მასალის დანახარჯის დონეს.
Შემიძლია თუ არა ხელით შევცვალო მოღუნვის მიმდევრობა ESA S530-ში?
Დიახ. ESA S530-ს შეუძლია გადაღუნვის მიმდევრობის ხელით მორგება. კონკრეტული წარმოების საჭიროებების შესაბამისად (როგორიცაა სპეციალური ნაგულის ფორმის შეზღუდვები, მოწყობილობის დროებითი ტექნოლოგიური შეზღუდვები), ოპერატორებს შეუძლიათ გადაღუნვის ნაწილის ან მთლიანი ეტაპების მორგება [გადაღუნვის] და [შეტრიალების] ღილაკების გამოყენებით, რაც უზრუნველყოფს როგორც "ტექნოლოგიური მოქნილობის", ასევე "დამუშავების სიზუსტის" დაცვას.
Რა უნდა გავაკეთოთ, თუ გამოითვლის დროს მოხდა შეცდომა ESA S530-ის გადაღუნვის მიმდევრობაში?
Თუ გამოითვლის შეცდომა მოხდა, რეკომენდებულია შეცდომის მოშველა შემდეგი ნაბიჯების მიხედვით:
1. ჯერ შეამოწმეთ შეყვანილი პარამეტრები: დაადასტურეთ, არის თუ არა ზუსტი საწყისი პარამეტრები, როგორიცაა მასალის ტიპი, ფირის სისქე და გადაღუნვის კუთხე (პარამეტრების შეცდომები ხშირად ხდება შეცდომების მიზეზი).
2. თუ პარამეტრები სწორია, იხილეთ ESA S530-ის ოფიციალური ექსპლუატაციის ინსტრუქცია და იპოვეთ შესაბამისი შეცდომის კოდის აღმოფხვრის მეთოდი თავიდან "შეცდომების გამოსწორება".
3. თუ პრობლემა კვლავ არ არის გადაწყვეტილი, დაუკავშირდით ტექნიკურ მხარდაჭერის გუნდს პირდაპირ, მოამზადეთ შეცდომის შესახებ შეტყობინების ეკრანის სურათი და ნაგულისხმევი პარამეტრები და მიიღეთ მიმართული დახმარება.
Დასასრული
ESA S530-ის მოღუნვის მიმდევრობის გამოთვლის პრინციპებისა და ოპერაციების შესწავლა არის ძირეული პირობა მეტალის მოღუნვის ოპერაციებში მაღალი სიზუსტისა და მაღალი ეფექტიანობის მისაღებად. ამ პროცესის ძირეული ლოგიკა მდგომარეობს შემდეგში: უზრუნველყოთ რთული ნაგულისხმევების, როგორიცაა ყუთების, ფორმის ხარისხის უზრუნველყოფა ცალ-ცალკე პროგრამებში ჰორიზონტალური/ვერტიკალური მოღუნვის დამუშავების სტრატეგიით და "ჯერ უფრო ვიწრო ფურცლის სიგანის მქონე სექციის შესრულებით"; ამასთან, ავტომატური და რუკით შესრულების ორმაგი რეჟიმის კოორდინაცია სისტემას აძლევს შესაძლებლობას, რომ გამოყენებადი იყოს როგორც სტანდარტიზებულ მასობრივ წარმოებაში, ასევე პერსონალიზებული დამუშავების საჭიროებების დასაკმაყოფილებლად.
Რომ სრულად გამოვიყენოთ გადაღუნვის მანქანის შესაძლებლობები და უზრუნველყოთ წარმოების პროცესის გლუხვი მიმდინარეობა, რეკომენდებულია, რომ ოპერატორებმა პრაქტიკულ გამოყენებაში მკაცრად შეასრულონ ზემოთ მოცემული ექსპლუატაციის ნორმები და მოარგონ პარამეტრები ნაგულისხმევი ნამუშევრის მახასიათებლების მიხედვით. დამატებითი დახმარებისთვის (მაგ., ტექნიკური დოკუმენტაციის მიღება, კონკრეტული ტექნოლოგიური კითხვების დასმა), შეგიძლიათ დაგვიკავშირდეთ ნებისმიერ დროს ან შემოგვივიდეთ საიტზე და იხილოთ გადაღუნვის ოპერაციებთან დაკავშირებული სრული მხარდაჭერის მასალები, რათა დაგვეხმაროთ ლითონის დამუშავების პროცესის უწყვეტი გაუმჯობესებაში.

