















































Diagnosi e gestione rapide dei guasti di allarme nella serie ET
Stai riscontrando problemi con gli allarmi sulla tua macchina piegatrice a servo elettrico completamente elettrica della serie ET? Sei nel posto giusto. Questo articolo fornisce una guida dettagliata su come risolvere rapidamente i problemi di allarme della serie ET, garantendo operazioni di produzione fluide ed efficienti. Sebbene gli allarmi della serie ET siano comuni, con l’approccio corretto è possibile risolverli tempestivamente e riportare l’attrezzatura alle prestazioni ottimali. Che tu sia nuovo di questo sistema o desideri ottimizzare il tuo processo di risoluzione dei problemi, questa guida ti fornirà i passaggi fondamentali per gestire efficacemente vari tipi di allarmi.
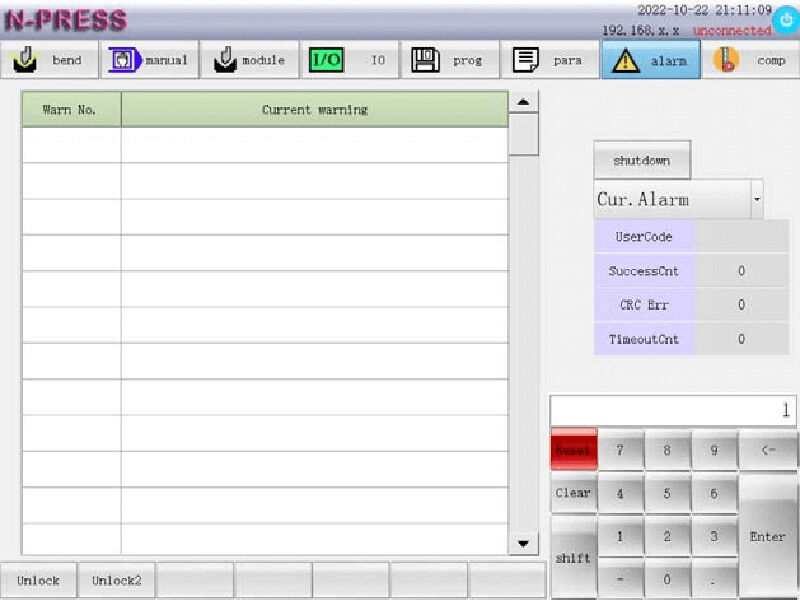
Passo 1: Accesso all’interfaccia di allarme della serie ET
Fare clic sul tasto funzione «allarme» per accedere all'interfaccia e visualizzare tutti i dettagli degli allarmi della serie ET. Questa interfaccia fornisce una visione completa degli allarmi attuali, dei registri degli allarmi e di altre statistiche fondamentali, quali il numero di comunicazioni riuscite, gli errori di verifica e i tempi di timeout.
Analizzare i registri degli allarmi
Comprendere la frequenza e il tipo di allarmi verificatisi esaminando i registri storici. Prestare particolare attenzione al numero di errori di verifica degli allarmi della serie ET e ai problemi di timeout, poiché questi indicano potenziali problemi di comunicazione sottostanti con il modulo IO.
Comunicazioni riuscite: indica il numero di comunicazioni avvenute con successo tra il sistema e il modulo IO, riflettendo lo stato generale della comunicazione del sistema.
Errori di verifica: indica il numero di errori di verifica nella comunicazione dati tra il sistema e il modulo IO. Un numero elevato di errori potrebbe suggerire problemi di integrità dei dati che richiedono un intervento immediato.
Tempi di timeout: Mostra il numero di errori di connessione comunicativa tra il sistema e il modulo IO, segnalando potenziali interruzioni nel trasferimento dati che potrebbero influenzare il funzionamento della macchina.
Passo 2: Interpretazione dello stato di allarme della serie ET
Per gestire efficacemente l’allarme della serie ET, verificare innanzitutto le informazioni relative all’allarme per identificare i codici di errore (ERRxxx) e di avviso (ALMxxx). Gli allarmi più recenti sono elencati come «Allarme corrente». Seguire le istruzioni per risolvere i problemi e premere il tasto di reset per cancellare l’allarme, ripristinando il funzionamento normale del sistema.
In caso di guasto del sistema CNC, vengono visualizzati fino a cinque allarmi correnti. Registrare il codice di avviso ed eseguire l’azione raccomandata; in caso di necessità, contattare il personale tecnico specializzato.
Seguendo questi passaggi, è possibile risolvere rapidamente gli allarmi della serie ET, riducendo i tempi di fermo e migliorando la produttività.
Passo 3: Risoluzione dei problemi relativi agli allarmi della serie ET
Allarme della serie ET – Codice di errore
ERR001: Allarme tenda luminosa di sicurezza
Causa: Quando l'asse Y è orientato verso il basso, il corpo umano o altri oggetti entrano nell'area della tenda luminosa.
Intervento: Verificare se qualcuno si trova all'interno dell'area della tenda luminosa oppure se la griglia di sicurezza è malfunzionante.
ERR002: Deviazione della posizione degli assi Y1 e Y2
(L'allarme verrà segnalato sia in modalità manuale che durante la piegatura.)
Causa: La deviazione del valore delle coordinate assolute degli assi Y1 e Y2 supera il valore massimo impostato per la deviazione dell'asse Y.
Intervento: Innanzitutto, verificare se l'errore di posizione degli assi Y1 e Y2 è fuori tolleranza. Successivamente, controllare se l'encoder lineare funziona correttamente oppure se è difettoso. Infine, esaminare la presenza di eventuali guasti nella trasmissione meccanica e verificare se il valore consentito per la deviazione di posizione, impostato nei parametri di sistema per gli assi Y1 e Y2, è stato fissato troppo basso.
ERR003: Allarme quando la pressione supera il valore massimo ammissibile della macchina utensile
Causa: Scelta errata dello stampo o del materiale.
Trattamento:
1. Verificare la scelta dello stampo e del materiale:
Assicurarsi che lo stampo e il materiale siano stati selezionati correttamente.
2. Controllare la pressione di piegatura:
Verificare se la pressione di piegatura impostata nel programma, nella sintesi e nell'interfaccia di programmazione è troppo elevata.
3. Valutazione della pressione:
Se la pressione visualizzata supera il limite ammissibile della macchina utensile:
Sostituire lo stampo o il materiale.
Se la pressione visualizzata rientra nel campo dei valori ammessi:
Verificare l’impostazione corretta delle altezze della matrice superiore e inferiore.
ERR004: Allarme quando la pressione supera il valore ammissibile dello stampo
Causa: Scelta errata dello stampo o del materiale.
Trattamento:
1. Verificare se lo stampo e il materiale sono stati selezionati correttamente.
2. Verificare se la pressione di piegatura impostata nel programma, nella sintesi e nell'interfaccia di programmazione è eccessiva.
Se la pressione visualizzata supera la pressione ammissibile dello stampo, sostituire lo stampo o il materiale.
Se la pressione visualizzata rientra nel campo di tolleranza ammissibile dello stampo, assicurarsi che le altezze dello stampo superiore e inferiore siano impostate correttamente.
ERR005: Pressione limite per la piegatura superata
Causa: Scelta errata dello stampo o del materiale.
Trattamento:
1. Verificare se lo stampo e il materiale sono stati selezionati correttamente.
2. Verificare se la pressione di piegatura impostata nel programma, nella sintesi e nell'interfaccia di programmazione è eccessiva.
3. Se la pressione visualizzata supera la pressione ammissibile dello stampo, sostituire lo stampo o il materiale.
4. Se la pressione visualizzata rientra nel campo di tolleranza ammissibile dello stampo, assicurarsi che le altezze dello stampo superiore e inferiore siano impostate correttamente.
ERR006: Timeout nella comunicazione del rilevamento della pressione
Causa: timeout nella comunicazione tra sistema e scheda IO.
Intervento: verificare che il tipo di scheda IO sia impostato correttamente e che i collegamenti del cavo di comunicazione RS485 siano adeguati.
ERR007: Guasto sul canale di rilevamento della pressione
Causa: Il valore analogico è troppo basso.
Intervento: Verificare che i collegamenti del segnale analogico siano corretti.
ERR008-ERR12: Superamento del limite rigido positivo sull'asse X-Z2
(L'allarme verrà visualizzato durante la piegatura; l'allarme verrà visualizzato anche in modalità manuale)
Causa: L'interruttore di fine corsa positivo di ciascun asse è stato attivato durante la piegatura.
Trattamento:
1. Verificare se ciascun asse è entrato nella zona dell'interruttore di fine corsa positivo.
2. Verificare se l'interruttore di fine corsa positivo di ciascun asse è difettoso.
3. Utilizzare l'interfaccia di controllo manuale per spostare ciascun asse fuori dalla zona dell'interruttore di fine corsa.
ERR013-ERR017: L'asse X-Z1 ha superato il limite rigido negativo
(L'allarme verrà attivato durante la piegatura e la ricerca del punto zero; l'allarme verrà attivato quando viene attivata la modalità manuale)
Causa: l'interruttore di fine corsa negativo di ciascun asse è stato azionato durante la piegatura.
Trattamento:
1. Muovere ciascun asse nell'interfaccia di controllo manuale per uscire dall'area dell'interruttore di fine corsa.
2. Verificare se ciascun asse entra nell'area dell'interruttore di fine corsa negativo.
3. Verificare se l'interruttore di fine corsa negativo di ciascun asse è guasto.
ERR018-ERR022: Asse X-Z2 – Superamento del limite morbido positivo
Causa: la coordinata macchina di ciascun asse supera la posizione del limite morbido positivo impostata dal parametro di sistema.
Intervento: verificare se la posizione del limite morbido positivo di ciascun asse, impostata dal parametro di sistema, è corretta.
ERR023-ERR027: Asse X-Z1 – Superamento del limite morbido negativo
Causa: la coordinata macchina di ciascun asse supera la posizione del limite morbido negativo impostata dal parametro di sistema.
Intervento: Verificare se la posizione del limite inferiore negativo di ciascun asse, impostata tramite il parametro di sistema, è corretta.
ERR028: Allarme scadenza macchina utensile
Causa: La macchina utensile è scaduta.
Intervento: Contattare il fornitore.
ERR029-ERR034: Allarme del driver servo di ciascun asse
Causa: Il driver servo dell'asse corrispondente ha generato un allarme oppure la connessione del driver servo è fallita.
Intervento: Verificare la causa dell'allarme del driver servo oppure controllare il cavo di collegamento tra il sistema e il driver servo.
ERR035-ERR040: Allarme dell'encoder di ciascun albero
Causa: Il segnale dell'encoder dell'albero corrispondente è errato.
Intervento: Verificare il cablaggio dei segnali relativi all'encoder nel cavo di collegamento tra il sistema e il driver servo.
ERR041-ERR046: Allarme di anomalia del servo in modalità senza movimento per ciascun asse
Causa: Quando l'asse corrispondente non riceve il comando di movimento, rileva che le coordinate di feedback sono anomale.
Intervento: Verificare il cavo di collegamento dell'encoder.
ERR047-ERR052: Allarme di anomalia del servo in modalità di movimento per ciascun asse
Causa: Allarme di tracciamento della posizione per ciascun asse.
Intervento: Verificare se il valore consentito dell'errore di tracciamento della posizione è stato impostato troppo piccolo.
ERR053: Allarme di mancanza di alimentazione
Causa: La tensione di alimentazione del sistema è risultata troppo bassa.
Intervento: Verificare se l'alimentazione è normale.
ERR054: Allarme di sistema
Causa: Eccezione interna del sistema.
Intervento: Contattare il fornitore.
ERR055: Allarme di arresto di emergenza
Causa: È stato rilevato che il tasto di arresto di emergenza è stato premuto.
Intervento: Verificare se il tasto di arresto di emergenza è premuto.
ERR056: In limite di coppia
Causa: È stata superata la coppia massima del motore.
Intervento: Verificare se la velocità o l’accelerazione sull’asse Y sono state impostate eccessivamente elevate.
ERR057: La distanza tra Z1 e Z2 è troppo piccola
Causa: Durante il movimento manuale in modalità di controllo manuale, l’asse Z ha superato la distanza di sicurezza definita dal parametro di sistema 603: z1z2.
Intervento: Verificare se i parametri impostati nei parametri di sistema sono adeguati.
ERR059: Avviso di scadenza imminente
Causa: Il tempo residuo di utilizzo del sistema è inferiore a 2 giorni.
Intervento: Contattare il fornitore.
ERR060: Marcia posteriore 2 oltre il limite morbido negativo
Causa: Durante l'utilizzo della marcia posteriore 2, la coordinata macchina sull'asse X supera la posizione del limite morbido negativo sull'asse X impostata dal parametro di sistema.
Intervento: Verificare se la marcia posteriore è stata selezionata in modo appropriato.
ERR061: Allarme porta di sicurezza
Causa: La porta di sicurezza è stata aperta durante l'utilizzo.
Intervento: Verificare se la porta di sicurezza è chiusa.
ERR062: Allarme condizionamento d'aria
Causa: Guasto del climatizzatore.
Intervento: Verificare il climatizzatore.
ERR063: Timeout compensazione deviazione
Causa: La compensazione della deviazione non può essere completata per un tempo prolungato.
Intervento: Verificare se la precisione della compensazione della deviazione è impostata troppo bassa.
ERR064: Errore direzione compensazione deviazione
Causa: Direzione di rotazione errata del motore di compensazione della deviazione.
Intervento: Verificare se il cablaggio del motore di compensazione della deviazione è corretto.
ERR065: Allarme arresto di emergenza 1
Causa: Il segnale di ingresso dell'allarme di arresto di emergenza 1 è valido.
Intervento: Verificare il segnale di ingresso dell’allarme di arresto di emergenza 1.
Allarme serie ET - Codice allarme
ALM001-ALM006 Ricerca dell’origine non riuscita per gli assi X-Z2
Causa: Il sistema non rileva il segnale di origine dell’asse corrispondente durante la ricerca, oppure le coordinate dell’origine dell’asse corrispondente sono impostate in modo errato.
Intervento: Verificare se la distanza di ricerca della terza sezione dell’asse corrispondente, impostata nei parametri di sistema, è inferiore a un passo. Inoltre, verificare le coordinate dell’origine dell’asse corrispondente.
ALM007-ALM011 Superamento del finecorsa positivo rigido per gli assi X-Z2
Causa: L’interruttore di finecorsa positivo dell’albero corrispondente è stato attivato in modalità manuale.
Intervento: Verificare se l’albero corrispondente è entrato nella zona dell’interruttore di finecorsa positivo o se quest’ultimo è difettoso. Spostare l’asse corrispondente tramite l’interfaccia di controllo manuale per uscire dalla zona dell’interruttore di finecorsa.
ALM012-ALM016 Superamento del finecorsa negativo rigido per gli assi X-Z1
Causa: L’interruttore di finecorsa negativo dell’albero corrispondente è stato attivato in modalità manuale.
Intervento: Verificare se l'albero corrispondente entra nella zona dell'interruttore di fine corsa negativo oppure se l'interruttore di fine corsa negativo dell'albero è guasto. Spostare l'asse corrispondente nell'interfaccia di controllo manuale per uscire dalla zona dell'interruttore di fine corsa.
ALM017-ALM021 Limite morbido superiore positivo degli assi X-Z2
Causa: Il limite morbido in avanti dell'albero corrispondente è stato attivato in modalità manuale.
Intervento: Spostare l'asse corrispondente nell'interfaccia di controllo manuale per uscire dal limite morbido e verificare se l'impostazione del limite morbido nei parametri di sistema è corretta.
ALM022-ALM026 Limite morbido eccessivo negativo dell'asse X-Z1
Causa: Il limite morbido negativo dell'asse corrispondente è stato attivato in modalità manuale.
Intervento: Spostare l'asse corrispondente nell'interfaccia di controllo manuale per uscire dal limite morbido e verificare se l'impostazione del limite morbido nei parametri di sistema è corretta.
ALM027 Deviazione di posizione degli assi Y1 e Y2 superiore al limite
Causa: La deviazione del valore di coordinata assoluta degli assi Y1 e Y2 supera il valore massimo di deviazione impostato per l'asse Y in modalità manuale.
Intervento: Verificare se l'errore di posizione degli assi Y1 e Y2 è fuori tolleranza; verificare se l'encoder lineare è non valido; controllare la trasmissione meccanica per eventuali guasti. Muovere gli assi Y1 e Y2 in una direzione che riduca lo scostamento assiale di posizione.
ALM028-ALM033 Scostamento della posizione zero degli assi X-Z2 superiore al limite
Causa: In modalità punto di riferimento, il valore delle coordinate macchina dell'asse corrispondente, dopo la ricerca dell'origine, differisce significativamente dal valore registrato nei parametri di sistema 260-263, 608-609.
Intervento: Verificare se i parametri di sistema 260-263, 608-609 sono impostati correttamente.
ALM035 Avviso pompa di lubrificazione
Causa: La pressione in uscita della pompa di lubrificazione è insufficiente.
Intervento: Verificare se il grasso lubrificante è esaurito. In caso affermativo, aggiungere grasso lubrificante al litio estremamente caricato, tipo n. 00. In caso negativo, verificare se la pompa di lubrificazione funziona correttamente, se la tubazione di lubrificazione presenta perdite e se il cavo del segnale della pompa di lubrificazione è collegato correttamente.
ALM035 Utensile non serrato
Causa: Non viene rilevato il segnale di serraggio del portautensile idraulico.
Intervento: Verificare se il cablaggio del segnale di serraggio del portautensile idraulico è corretto.
ALM036 Distanza ZLZ2 troppo ridotta
Causa: L'asse Z in modalità di comando manuale supera la distanza di sicurezza impostata dal parametro di sistema 603: z1z2.
Intervento: Verificare se i parametri impostati nei parametri di sistema sono adeguati.
ALM037 Avviso tendina di sicurezza a raggi infrarossi
Causa: Il segnale della tendina fotoelettrica è risultato valido.
Intervento: Verificare se la tendina fotoelettrica è ostruita.
ALM039 Avviso di scadenza
Causa: Il tempo residuo di utilizzo del sistema è inferiore a 2 giorni.
Intervento: Contattare il fornitore.
ALM039 Limite superiore positivo per la compensazione della deviazione
Causa: Il meccanismo di compensazione della deviazione ha superato il limite positivo.
Intervento: Verificare il verso di movimento del meccanismo di compensazione della deviazione e se la connessione del segnale di fine corsa è corretta.
ALM040 Limite negativo della compensazione della deviazione
Causa: Il meccanismo di compensazione della deviazione ha superato il limite negativo.
Intervento: Verificare il verso di movimento del meccanismo di compensazione della deviazione e se la connessione del segnale di fine corsa è corretta.
ALM041 Compensazione della deviazione
Causa: Segnalazione relativa alla compensazione della deviazione.
Intervento: Verificare se l’impostazione della precisione della compensazione della deviazione è troppo piccola.
ALM042 Inclinazione dell’asse Y
Causa: Il segnale di ingresso di inclinazione dell’asse Y è valido.
Intervento: Verificare se Y1 e Y2 sono paralleli e se l’impostazione dell’origine è corretta.
Conclusione
In sintesi, la chiave per risolvere rapidamente gli allarmi degli stampi della serie ET risiede nella padronanza delle fasi fondamentali per identificare ed eliminare efficacemente i guasti più comuni. Seguendo le procedure illustrate in questo articolo — ad esempio controllando i collegamenti elettrici, calibrando i parametri di sistema ed eseguendo la manutenzione ordinaria — sarà possibile ridurre al minimo i tempi di fermo e garantire l’efficienza produttiva.
Per ulteriore assistenza o informazioni tecniche più dettagliate, non esitate a contattare il nostro team di supporto tecnico, JUGAO CNC MACHINE. Siamo pronti a fornirvi consulenza professionale e risorse aggiuntive per aiutarvi a utilizzare i nostri prodotti in modo più efficiente. Potete inoltre consultare altri nostri documenti tecnici per approfondire la manutenzione delle piegatrici e l’ottimizzazione delle prestazioni.

