















































Արագ ախտորոշում և վթարումների վերահսկում ET սերիայի համար
Հանդիպում եք խնդիրների հետ ET սերիայի լիակատար էլեկտրական սերվո ծռման մեքենայի հարթակի մասին զգուշացման հաղորդագրությունների կապակցությամբ: Դուք ճիշտ վայրում եք: Այս հոդվածը մանրամասն ուղեցույց է տրամադրում, թե ինչպես արագ վերացնել ET սերիայի զգուշացման հաղորդագրությունները՝ ապահովելով անխափան և արդյունավետ արտադրական գործողություններ: Չնայած ET սերիայի զգուշացման հաղորդագրությունները տարածված են, ճիշտ մոտեցմամբ դուք կարող եք արագ վերացնել դրանք և վերականգնել ձեր սարքավորումները օպտիմալ աշխատանքի վիճակում: Արդյունքում՝ անկախ նրանից, թե դուք նոր եք այս համակարգում, թե փորձում եք օպտիմալացնել խնդիրների լուծման գործընթացը, այս ուղեցույցը կտրամադրի հիմնարար քայլեր, որոնք օգնեն ձեզ արդյունավետ կերպով վերացնել տարբեր զգուշացման հաղորդագրություններ:
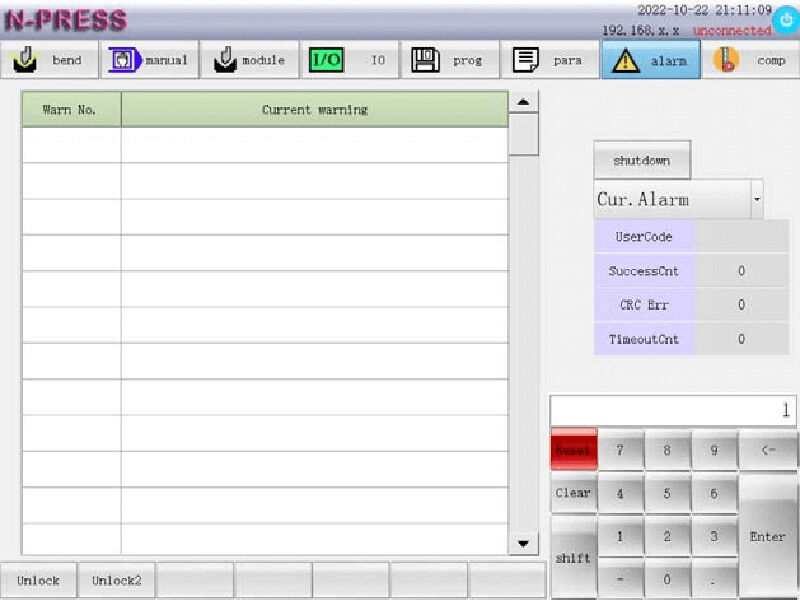
Քայլ 1. ET սերիայի զգուշացման հարթակին մուտք գործելը
Սեղմեք «զգուշացում» ֆունկցիոնալ ստեղնը՝ մուտք ստանալու ինտերֆեյս և դիտելու ET շարքի բոլոր զգուշացումների մանրամասները: Այս ինտերֆեյսը տրամադրում է ընթացիկ զգուշացումների, զգուշացումների գրառումների և այլ կարևոր վիճակագրական տվյալների (օրինակ՝ հաջողված փոխանակումների քանակը, վավերացման սխալները և ժամանակային սահմանափակումները) լիարժեք պատկերը:
Վերլուծեք զգուշացումների գրառումները
Վերլուծեք անցյալում գրառված գրառումները՝ հասկանալու համար, թե որ տեսակի և որ հաճախականությամբ են առաջանում զգուշացումները: Հատկապես ուշադրություն դարձրեք ET շարքի զգուշացումների վավերացման սխալների և ժամանակային սահմանափակումների քանակին, քանի որ դրանք ցույց են տալիս մուտք-ելքի (IO) մոդուլի հետ կապված հիմնարար հաղորդակցման խնդիրներ:
Հաջողված փոխանակումների քանակը. Ցույց է տալիս համակարգի և IO մոդուլի միջև հաջողված հաղորդակցությունների թիվը և նշանակում է համակարգի ընդհանուր հաղորդակցման առողջական վիճակը:
Վավերացման սխալները. Ցույց է տալիս համակարգի և IO մոդուլի միջև տվյալների հաղորդակցման ընթացքում առաջացած վավերացման սխալների թիվը: Սխալների բարձր քանակը կարող է վկայել տվյալների ամբողջականության խնդիրների մասին, որոնք պահանջում են անմիջապես ուշադրություն:
Արժեքի истումը. Ցույց է տալիս համակարգի և IO մոդուլի միջև կապի միացման սխալների թիվը, ինչը վկայում է տվյալների փոխանցման հնարավոր խաթարումների մասին, որոնք կարող են ազդել մեքենայի աշխատանքի վրա:
2-րդ քայլ՝ ET շարքի հարձակման ստատուսի մեկնաբանում
ET շարքի հարձակումը արդյունավետ կերպով վերացնելու համար նախ ստուգեք հարձակման տեղեկատվությունը՝ սխալների (ERRxxx) և նախազգուշացումների (ALMxxx) կոդերի համար: Ամենավերջին հարձակումները ցուցադրվում են «Ընթացիկ հարձակում» անվանումով: Հետևեք ցուցումներին՝ խնդիրները վերացնելու համար, և սեղմեք վերականգնման ստեղնը՝ հարձակումը վերացնելու և համակարգի նորմալ աշխատանքը վերականգնելու համար:
Եթե տեղի է ունենում CNC համակարգի ավարիա, ցուցադրվելու են մինչև հինգ ընթացիկ հարձակումներ: Շարադրեք նախազգուշացման կոդը և կատարեք առաջարկվող գործողությունները, կամ, եթե անհրաժեշտ է, դիմեք մասնագիտացված սպասարկման անձնակազմին:
Այս քայլերին հետևելով՝ կարող եք արագ վերացնել ET շարքի հարձակումները, նվազեցնել անաշխատանքության ժամանակը և բարձրացնել արտադրողականությունը:
3-րդ քայլ՝ ET շարքի հարձակումների վերացում
ET շարքի հարձակում՝ սխալի կոդ
ERR001. Անվտանգության լուսային վարագույրի հարձակում
Պատճառ՝ Երբ Y-առանցքը շարժվում է դեպի ներքև, մարդու մարմինը կամ այլ առարկաները մտնում են լուսային վերապատման գոտի։
Վերացման միջոց՝ Ստուգել, թե արդյոք որևէ մեկը գտնվում է լուսային վերապատման գոտում, կամ անվտանգության ցանցը խափանված է։
ERR002. Y1 և Y2 առանցքերի դիրքի շեղում
(Զգուշացումը կհայտնվի ձեռքով ռեժիմում ստեղծվելու դեպքում, իսկ ծռման ժամանակ ստեղծվելու դեպքում նույնպես կհայտնվի զգուշացում)։
Պատճառ՝ Y1 և Y2 առանցքերի բացարձակ կոորդինատային արժեքների շեղումը գերազանցում է Y-առանցքի առավելագույն թույլատրելի շեղման սահմանային արժեքը։
Վերացման միջոց՝ Նախ ստուգել, թե արդյոք Y1 և Y2 առանցքերի դիրքի սխալը դուրս է եկել թույլատրելի սահմաններից։ Այնուհետև ստուգել, թե գծային կոդավորիչը ճիշտ է աշխատում, թե ոչ, կամ այն անվավեր է։ Վերջում՝ ստուգել, թե արդյոք մեխանիկական փոխանցման համակարգում առկա է խափանում, և արդյոք համակարգի պարամետրերում Y1 և Y2 առանցքերի համար սահմանված դիրքի շեղման թույլատրելի արժեքը չի սահմանվել չափից փոքր։
ERR003. Ճնշումը գերազանցել է մեքենայի առավելագույն թույլատրելի արժեքը
Պատճառ՝ սխալ ձուլատակը կամ նյութը է ընտրված։
Ynchronously Treatment:
1. Ստուգել ձուլատակը և նյութի ընտրությունը.
Համոզվել, որ ձուլատակը և նյութը ճիշտ են ընտրված:
2. Ստուգել ծռման ճնշումը.
Ստուգել, արդյոք ծրագրում, սինթեզում և ծրագրավորման ինտերֆեյսում ծռման ճնշումը չի գերազանցում թույլատրելի սահմանը:
3. Ճնշման գնահատական.
Եթե ցուցադրվող ճնշումը գերազանցում է մեքենայի թույլատրելի սահմանը.
Փոխարինել ձուլատակը կամ նյութը:
Եթե ցուցադրվող ճնշումը թույլատրելի սահմաններում է.
Ստուգել վերին և ստորին մատրիցների բարձրության ճիշտ սահմանումը:
ERR004. Ձուլատակի թույլատրելի արժեքից բարձր ճնշման դեպքում սիգնալիզացիա
Պատճառ՝ սխալ ձուլատակը կամ նյութը է ընտրված։
Ynchronously Treatment:
1. Ստուգեք, արդյոք ձուլատակը և նյութը ճիշտ են ընտրված:
2. Ստուգեք, արդյոք ծրագրում, սինթեզում և ծրագրավորման ինտերֆեյսում ծռման ճնշումը չի գերազանցում թույլատրելի սահմանը:
Եթե ցուցադրվող ճնշումը գերազանցում է ձուլատակի թույլատրելի ճնշումը, փոխարինեք ձուլատակը կամ նյութը:
Եթե ցուցադրվող ճնշումը ձուլատակի թույլատրելի սահմաններում է, համոզվեք, որ վերին և ստորին ձուլատակների բարձրությունները ճիշտ են սահմանված:
ERR005. Ծռման ճնշման սահմանի գերազանցում
Պատճառ՝ սխալ ձուլատակը կամ նյութը է ընտրված։
Ynchronously Treatment:
1. Ստուգեք, արդյոք ձուլատակը և նյութը ճիշտ են ընտրված:
2. Ստուգեք, արդյոք ծրագրում, սինթեզում և ծրագրավորման ինտերֆեյսում ծռման ճնշումը չի գերազանցում թույլատրելի սահմանը:
3. Եթե ցուցադրվող ճնշումը գերազանցում է ձուլատակի թույլատրելի ճնշումը, փոխարինեք ձուլատակը կամ նյութը:
4. Եթե ցուցադրվող ճնշումը ձուլատակի թույլատրելի սահմաններում է, համոզվեք, որ վերին և ստորին ձուլատակների բարձրությունները ճիշտ են սահմանված:
ERR006. Ճնշման հայտնաբերման կապի ժամանակային սահմանի գերազանցում
Պատճառ՝ համակարգի և IO սարքավորման միջև կապի ժամանակային սահմանի գերազանցում:
Վերացման միջոց՝ Համոզվեք, որ IO սարքավորման տեսակի սահմանադրումները ճիշտ են և 485-ի կապի գծերը ճիշտ են միացված:
ՍԽԱԼ 007. Ճնշման հայտնաբերման առաջին ալիքի սխալ
Պատճառ՝ Անալոգային արժեքը չափազանց ցածր է:
Վերացման եղանակ՝ Հաստատեք ճիշտ անալոգային սիգնալային միացումները:
ՍԽԱԼ 008–ՍԽԱԼ 012. X–Z2 առանցքի դրական կարծր սահմանափակում
(Զգուշացումը կառաջանա ծալման ժամանակ, իսկ ձեռքով ռեժիմում առաջացման ժամանակ նույնպես կառաջանա զգուշացում)
Պատճառ՝ Յուրաքանչյուր առանցքի դրական սահմանափակման միացումը ակտիվացվել է ծալման ընթացքում:
Ynchronously Treatment:
1. Ստուգեք, թե արդյոք յուրաքանչյուր առանցքը մտել է դրական սահմանափակման միացման գոտի:
2. Հաստատեք, թե արդյոք յուրաքանչյուր առանցքի դրական սահմանափակման միացումը սխալ է աշխատում:
3. Օգտագործեք ձեռքով կառավարման ինտերֆեյսը՝ յուրաքանչյուր առանցքը դուրս բերելու սահմանափակման միացման գոտուց:
ՍԽԱԼ 013–ՍԽԱԼ 017. X–Z1 առանցքը գերազանցել է բացասական կարծր սահմանափակումը
(Զգուշացումը կակտիվանա ծռման և զրոյական կետի որոնման ժամանակ; զգուշացումը կակտիվանա ձեռքով ռեժիմի ակտիվացման ժամանակ)
Պատճառ՝ յուրաքանչյուր առանցքի բացասական սահմանային սալիկը ակտիվացվել է ծռման ընթացքում:
Ynchronously Treatment:
1. Ձեռքով կառավարման ինտերֆեյսում շարժեք յուրաքանչյուր առանցքը՝ դուրս գալու համար սահմանային սալիկի գոտուց:
2. Ստուգեք, թե արդյոք յուրաքանչյուր առանցքը մտել է բացասական սահմանային սալիկի գոտի:
3. Ստուգեք, թե արդյոք յուրաքանչյուր առանցքի բացասական սահմանային սալիկը խափանված է:
ERR018-ERR022. X-Z2 առանցքների գերդրական մեղմ սահման
Պատճառ՝ յուրաքանչյուր առանցքի մեքենայական կոորդինատը գերազանցել է համակարգի պարամետրերով սահմանված դրական մեղմ սահմանի դիրքը:
Վերականգնման միջոց՝ Ստուգեք, թե արդյոք համակարգի պարամետրերով յուրաքանչյուր առանցքի համար սահմանված դրական մեղմ սահմանի դիրքը ճիշտ է:
ERR023-ERR027. X-Z1 առանցքների գերբացասական մեղմ սահման
Պատճառ՝ յուրաքանչյուր առանցքի մեքենայական կոորդինատը գերազանցել է համակարգի պարամետրերով սահմանված բացասական մեղմ սահմանի դիրքը:
Վերահսկողություն՝ Ստուգեք, թե արդյոք համակարգի պարամետրերով սահմանված յուրաքանչյուր առանցքի բացասական մեղմ սահմանային դիրքը ճիշտ է:
ERR028. Հաստատված ժամկետից ավելի երկար աշխատող հաստոցի մասին զգուշացում
Պատճառ՝ Հաստոցը գերազանցել է հաստատված ժամկետը:
Վերահսկողություն՝ Խնդրում ենք դիմել մատակարարին:
ERR029–ERR034. Յուրաքանչյուր առանցքի սերվո վարիչների մասին զգուշացում
Պատճառ՝ Համապատասխան առանցքի սերվո վարիչը տվել է զգուշացում կամ սերվո վարիչի միացումը ձախողվել է:
Վերահսկողություն՝ Ստուգեք սերվո վարիչի զգուշացման պատճառը կամ ստուգեք համակարգի և սերվո վարիչի միջև միացնող կաբելի միացումը:
ERR035–ERR040. Յուրաքանչյուր առանցքի էնկոդերի մասին զգուշացում
Պատճառ՝ Համապատասխան առանցքի էնկոդերի սիգնալը սխալ է:
Վերահսկողություն՝ Ստուգեք համակարգի և սերվո վարիչի միջև միացնող կաբելի էնկոդերին վերաբերող սիգնալային միացումները:
ERR041-ERR046: Ոչ շարժական ռեժիմով յուրաքանչյուր առանցքի սերվո աննորմալ ազդանշան
Պատճառը. Երբ համապատասխան առանցքը չի ստանում շարժման հրամանը, այն հայտնաբերում է, որ փոխանցվող կոորդինատները աննորմալ են:
Բուժում. Ստուգեք կոդավորիչի միացման մալուխը:
ERR047-ERR052: Յուրաքանչյուր առանցքի շարժման ռեժիմի սերվո աննորմալ ազդանշան
Պատճառ. յուրաքանչյուր առանցքի դիրքի հետեւման ազդանշան:
Բուժում. Ստուգեք, թե արդյոք դիրքի հետեւման սխալների թույլատրելի արժեքը չափազանց փոքր է:
ERR053: Էլեկտրական անջատման զգուշացում
Պատճառ. Համակարգի էլեկտրականության լարման լարման չափը չափազանց ցածր է:
Բուժում. Ստուգեք, թե արդյոք էլեկտրականության մատակարարումը նորմալ է:
ERR054: Համակարգային ազդանշան
Պատճառ՝ Սիստեմի ներքին բացառություն:
Վերահսկողություն՝ Խնդրում ենք դիմել մատակարարին:
ERR055. Ավտոմատ կանգնեցման հաղորդագրություն
Պատճառ՝ Հայտնաբերվել է, որ ավտոմատ կանգնեցման ստեղնը սեղմված է:
Վերացման միջոց՝ Ստուգեք, թե արդյոք ավտոմատ կանգնեցման ստեղնը սեղմված է:
ERR056. Պտտման մոմենտի սահմանափակում
Պատճառ՝ Շարժիչի առավելագույն պտտման մոմենտը գերազանցվել է:
Վերացման միջոց՝ Ստուգեք, թե արդյոք y-առանցքի արագությունը կամ արագացումը սահմանված է չափազանց մեծ:
ERR057. Z1-ի և Z2-ի միջև հեռավորությունը չափազանց փոքր է
Պատճառ՝ Ձեռքով կառավարման ռեժիմում ձեռքով կառավարվող շարժման z-առանցքը գերազանցել է համակարգի 603-րդ պարամետրով սահմանված անվտանգության հեռավորությունը՝ z1z2:
Վերացման միջոց՝ Ստուգեք, թե արդյոք համակարգի պարամետրերով սահմանված արժեքները ճիշտ են:
ERR059. Ավարտից հետո նախազգուշացում
Պատճառ՝ համակարգի օգտագործման ժամանակը պակաս է 2 օրից:
Վթարման վերացում՝ կապվեք մատակարարի հետ:
ERR060. Հետին փոխանցման մեխանիզմ 2-ը գերազանցել է բացասական մեղմ սահմանափակումը
Պատճառ՝ երբ օգտագործվում է հետին փոխանցման մեխանիզմ 2-ը, մեքենայի x առանցքի կոորդինատը գերազանցում է համակարգի պարամետրերով սահմանված x առանցքի բացասական մեղմ սահմանափակման դիրքը:
Վթարման վերացում՝ ստուգեք՝ արդյոք հետին փոխանցման մեխանիզմը ընտրված է ճիշտ:
ERR061. Անվտանգության դռան հարթակ
Պատճառ՝ օգտագործման ընթացքում բացվել է անվտանգության դուռը:
Վթարման վերացում՝ ստուգեք՝ արդյոք անվտանգության դուռը փակված է:
ERR062. Կլիմայական համակարգի հարթակ
Պատճառ՝ Կլիմայական համակարգի խափանում:
Բուժում՝ Ստուգել կլիմայական համակարգը:
ERR063. Չարտահայտված շեղման համակերպման ժամանակահատվածի ավարտ:
Պատճառ՝ Չարտահայտված շեղման համակերպումը երկար ժամանակ չի կարողանում ավարտվել:
Բուժում՝ Ստուգել, թե արդյոք չարտահայտված շեղման համակերպման ճշգրտությունը սահմանված է չափազանց փոքր:
ERR064. Չարտահայտված շեղման համակերպման ուղղության սխալ:
Պատճառ՝ Չարտահայտված շեղման համակերպման շարժիչի պտտման ուղղության սխալ:
Բուժում՝ Ստուգել, թե արդյոք չարտահայտված շեղման համակերպման շարժիչի միացման գծերը ճիշտ են միացված:
ERR065. Ավտոմատ կանգնեցման զգուշացում 1:
Պատճառ՝ Ավտոմատ կանգնեցման զգուշացման 1 մուտքը վալիդ է:
Վերականգնման միջոցառում՝ Ստուգել վթարման դեպքում կանգնեցնելու հայտարարման 1 մուտքային սիգնալը։
ET շարքի հայտարարումներ՝ Հայտարարման կոդ
ALM001-ALM006 X-Z2 առանցքի սկզբնական դիրքի որոնումը ձախողվել է
Պատճառ՝ Համակարգը չի հայտնաբերում համապատասխան առանցքի սկզբնական դիրքի սիգնալը որոնման ընթացքում կամ համապատասխան առանցքի սկզբնական կոորդինատները սխալ են սահմանված։
Վերականգնման միջոցառում՝ Ստուգել, թե արդյոք համակարգի պարամետրերում համապատասխան առանցքի երրորդ հատվածի որոնման հեռավորությունը փոքր է մեկ քայլից։ Այնուհետև ստուգել համապատասխան առանցքի սկզբնական կոորդինատները։
ALM007-ALM011 X-Z2 առանցքի գերդրական կոշտ սահմանափակում
Պատճառ՝ Համապատասխան առանցքի դրական սահմանափակման միացնիչը ակտիվացվել է ձեռքով ռեժիմում։
Վերականգնման միջոցառում՝ Ստուգել, թե արդյոք համապատասխան առանցքը մտել է դրական սահմանափակման միացնիչի գոտի կամ դրական սահմանափակման միացնիչը սխալի է ենթարկվել։ Ձեռքով կառավարման ինտերֆեյսում շարժել համապատասխան առանցքը՝ դուրս գալու համար սահմանափակման միացնիչի գոտուց։
ALM012-ALM016 X-Z1 առանցքի գերբացասական կոշտ սահմանափակում
Պատճառ՝ Համապատասխան առանցքի բացասական սահմանափակման միացնիչը ակտիվացվել է ձեռքով ռեժիմում։
Վերահսկում. Ստուգեք, թե համապատասխան առանցքը մտնում է արժեքի բացասական սահմանային սվիթչի տիրույթի մեջ, թե ոչ, կամ արդյոք այդ առանցքի բացասական սահմանային սվիթչը ձախողվել է: Ձեռքով կառավարման ինտերֆեյսում շարժեք համապատասխան առանցքը՝ դուրս գալու համար սահմանային սվիթչի տիրույթից:
ALM017-ALM021 X-Z2 Առանցքի գերդրական փափուկ սահմանային սխալ
Պատճառ. Համապատասխան առանցքի դեպի առաջ ուղղված փափուկ սահմանային արժեքը ակտիվացվել է ձեռքով կառավարման режիմում:
Վերահսկում. Ձեռքով կառավարման ինտերֆեյսում շարժեք համապատասխան առանցքը՝ դուրս գալու համար փափուկ սահմանային տիրույթից, և ստուգեք, թե համակարգի պարամետրերում փափուկ սահմանային արժեքի սահմանումը ճիշտ է, թե ոչ:
ALM022-ALM026 X-Z1 Առանցքի գերբացասական փափուկ սահմանային սխալ
Պատճառ. Համապատասխան առանցքի բացասական փափուկ սահմանային արժեքը ակտիվացվել է ձեռքով կառավարման режիմում:
Վերահսկում. Ձեռքով կառավարման ինտերֆեյսում շարժեք համապատասխան առանցքը՝ դուրս գալու համար փափուկ սահմանային տիրույթից, և ստուգեք, թե համակարգի պարամետրերում փափուկ սահմանային արժեքի սահմանումը ճիշտ է, թե ոչ:
Y1 և Y2 առանցքների դիրքի շեղումը գերազանցում է սահմանային արժեքը
Պատճառ. Y1 և Y2 առանցքների բացարձակ կոորդինատային արժեքների շեղումը գերազանցում է Y առանցքի առավելագույն թույլատրելի շեղման սահմանային արժեքը ձեռքով կառավարման режիմում:
Վերահսկում. Ստուգել, թե արդյոք Y1 և Y2 առանցքների դիրքի սխալը գերազանցում է թույլատրելի սահմանը; ստուգել, թե արդյոք գծային էնկոդերը անվավեր է; ստուգել մեխանիկական փոխանցման համակարգի աշխատանքի վավերականությունը: Y1 և Y2 առանցքները շարժել այն ուղղությամբ, որն նվազեցնում է առանցքային դիրքի շեղումը:
ALM028-ALM033 X-Z2 առանցքի զրոյական դիրքի շեղումը գերազանցում է սահմանային արժեքը
Պատճառ. Հղման կետի ռեժիմում սկզբնական դիրքը որոնելուց հետո համապատասխան առանցքի մեքենայական կոորդինատային արժեքը կտրուկ տարբերվում է համակարգի պարամետրերում (260-263, 608-609) գրանցված արժեքից:
Վերահսկում. Ստուգել, թե արդյոք համակարգի պարամետրերը 260-263, 608-609 ճիշտ են սահմանված:
ALM034 Մածուցիկացման պոմպի նախազգուշացում
Պատճառ. Մածուցիկացման պոմպի ելքային ճնշումը անբավարար է:
Վերահսկում. Ստուգել, թե արդյոք մածուցիկացնող ճարպը սպառվել է: Եթե այո, ապա լցնել № 00 բարձր ճնշման լիթիումային հիմքի վրա հիմնված մածուցիկացնող ճարպ: Եթե ոչ, ապա ստուգել, թե արդյոք մածուցիկացման պոմպը նորմալ է աշխատում, մածուցիկացման խողովակներում արդյո՞ք կա արտահոսում և մածուցիկացման պոմպի սիգնալային միացման գիծը ճիշտ է միացված:
ALM035 Գործիքը չի ամրացված
Պատճառ՝ Հիդրավլիկ գործիքի պահանջվող սեղմման սիգնալը չի հայտնաբերվում։
Վերացման միջոց՝ Ստուգել, թե արդյոք հիդրավլիկ գործիքի պահանջվող սեղմման սիգնալի միացման շղթան ճիշտ է կատարված։
ALM036 ZLZ2՝ Շատ փոքր հեռավորություն
Պատճառ՝ Z-առանցքը ձեռքով կառավարման ռեժիմում գերազանցում է համակարգի 603-րդ պարամետրով սահմանված անվտանգության հեռավորությունը՝ z1z2։
Վերացման միջոց՝ Ստուգել, թե արդյոք համակարգի պարամետրերով սահմանված արժեքները համապատասխանում են պահանջներին։
ALM037 Անվտանգության լուսային վերապատում՝ նախազգուշացում
Պատճառ՝ Լուսային վերապատման սիգնալը հայտնաբերվել է որպես վալիդ (գործող)։
Վերացման միջոց՝ Ստուգել, թե արդյոք լուսային վերապատումը արգելափակված է։
ALM038 Ժամկետավարձի նախազգուշացում
Պատճառ՝ համակարգի օգտագործման ժամանակը պակաս է 2 օրից:
Վթարման վերացում՝ կապվեք մատակարարի հետ:
ALM039 Չարտահայտված շեղման համակարգման դրական սահման
Պատճառ՝ շեղման հատուցման մեխանիզմը գերազանցել է դրական սահմանը։
Բուժում՝ Ստուգեք շեղման հատուցման մեխանիզմի շարժման ուղղությունը և սահմանային սիգնալի միացման ճշմարտացիությունը։
ALM040 Շեղման հատուցման բացասական սահման
Պատճառ՝ շեղման հատուցման մեխանիզմը գերազանցել է բացասական սահմանը։
Բուժում՝ Ստուգեք շեղման հատուցման մեխանիզմի շարժման ուղղությունը և սահմանային սիգնալի միացման ճշմարտացիությունը։
ALM041 Շեղման հատուցում
Պատճառ՝ շեղման հատուցման մասին նախազգուշացում։
Բուժում՝ Ստուգեք՝ արդյոք շեղման հատուցման ճշգրտության սահմանադրությունը չի սահմանվել չափից փոքր։
ALM042 Y-առանցքի թեքում
Պատճառ՝ Y-առանցքի թեքման մուտքային սիգնալը վավեր է։
Բուժում՝ Ստուգեք՝ արդյոք Y1 և Y2-ը զուգահեռ են և արդյոք սկզբնական դիրքի սահմանադրությունը ճիշտ է։
Եզրակացություն
Ամփոփելով՝ ET շարքի ձուլման սարքերի վթարումների արագ վերացման բանալին կայանում է տարածված խափանումները արդյունավետ նույնականացնելու և վերացնելու հիմնարար քայլերի տիրապետման մեջ: Այս հոդվածում ներկայացված ընթացակարգերի՝ օրինակ՝ միացումների ստուգման, համակարգի պարամետրերի կարգավորման և սովորական սպասարկման կատարման հետևման միջոցով կարող եք նվազեցնել անաշխատանքության ժամանակը և ապահովել արտադրության արդյունավետությունը:
Լրացուցիչ օգնության կամ ավելի մանրամասն տեխնիկական տեղեկատվության համար խնդրում ենք ազատորեն դիմել մեր տեխնիկական աջակցության թիմին՝ JUGAO CNC MACHINE-ին: Մենք պատրաստ ենք տրամադրել ձեզ մասնագիտական խորհրդատվություն և լրացուցիչ ռեսուրսներ՝ օգնելու ձեզ ավելի արդյունավետ օգտագործել մեր արտադրանքը: Կարող եք նաև ծանոթանալ մեր այլ տեխնիկական փաստաթղթերի հետ՝ ստանալու լրացուցիչ տեղեկատվություն ծալող մեքենաների սպասարկման և արդյունավետության օպտիմալացման վերաբերյալ:

