















































CNC Պահեստի Մաքրում T8 CNC Կառավարիչով. Ինստալյացիայի և Օպերացիաների Գիդ
1. Հիդրավլուկ յոթի լցում
Յոթի ընտրություն՝ օգտագործեք շոգեկան հիդրավլուկ յոթ, որը համապատասխանում է շուրջընթացի ջերմաստիճաններին։ Ստանդարտ պայմանների դեպքում հաositարժելվում է 46 # շոգեկան հիդրավլուկ յոթ։
Յոթի ծավալ՝ լցրեք տանկը 80%-90% կարգով։

Կարևոր քայլեր՝
0:31՝ միացրեք անոթի սահքի վարորդը՝ համաձայն օդավոր կապողի բայոնետի և նախնական նունների սեղմումով։
0:53՝ միացրեք էլեկտրական կաբելը՝ համաձայն մեքենայի ընդհանուր ուժի։ Կցրեք եռաչափ կորդերը էլեկտրական արկղի ուժի վարորդին։
1:37 միացրեք էլեկտրական խցիկի լիցքավորման անջատիչը:
1:57: Համոզվեք, որ բոլոր վթարային կանգառի կոճակները բաց են:
2:07: Սկսեք վառելիքի պոմպը էկրանի կոճակի միջոցով, ապա սեղմեք վառելիքի վառելիքի արգելափակումը: Համոզվեք, որ գլխավոր շարժիչը պտտվում է ժամացույցի հուշումով (համոզվեք, որ շարժիչի ուղղությունը տեղադրված է կպիտակում):
○ Եթե այն հակառակ ժամացույցի հուշումով է, փոխեք երկու փուլային լարերը եւ կրկին փորձեք:

2. Կատարել Մեքենայի հավասարեցում
3:13: Օգտագործեք հյութի մակարդակ՝ աշխատանքային սեղանի հորիզոնական ճշգրտությունը չափելու համար: Կարգավորեք հիմքի պլատի փամփուշտները (կենտրոնացրեք պողպատե պլատները ներքեւում կայունության համար):

3. Հետեւեք T8 Համակարգային ինտերֆեյսի գործառույթներ
3:37: Նավթային պոմպի կառավարում. պահեք 3 վայրկյան շարժիչը սկսելու/կանխելու համար:
3:43: Upper Die Selection/Editing: Համապատասխանեք գրադարանը իրական գործիքների հետ:
3:48: Ստորին V-Groove խմբագրում. Ներմուծեք իրական groove չափերը (օրինակ, 8 × թերթի հաստությունը):
3:55: MaterialPageRoute/Երկարություն Մուտք: Մուտքագրեք չափված արժեքները:
4:03: Անկյունի ցուցադրումը տեղափոխել: Փոխանցվել ծռող անկյան և Y-առանցքի արժեքի միջև:
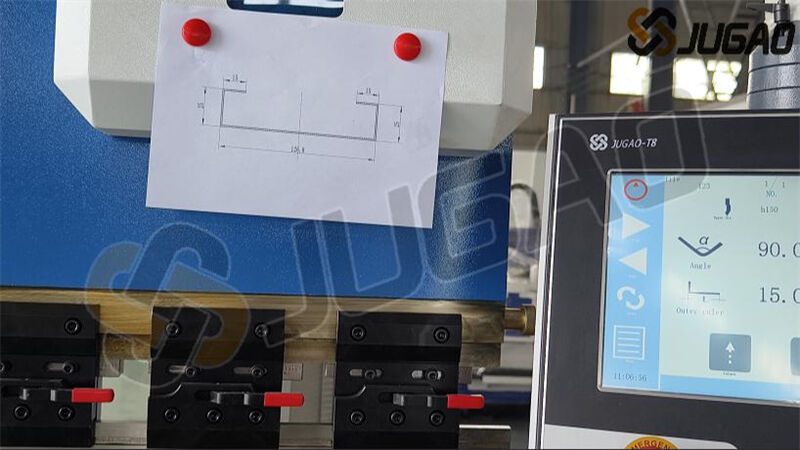
4:07: Ծռող անկյան կարգավորումը: Մուտքագրել պահանջվող անկյունը (օրինակ, 90°):
4:12: Անկյան ուղղումը: Կոմպենսացիա շեղումների (օրինակ, մուտքագրել –1.5° 91.5° արդյունքի համար):
4:19: X-առանցքի (հետևանիշ) կառավարումը: Կարգավորել ներքին/արտաքին չափերի համար դիրքերը:
4:30: Սլայդերի վերադարձ: Տեղափոխվել վերին մահացանելի կենտրոնին:
4:38: Պրոգրամի կատարումը: Սեղմել «START»; ցուցադրում է «STOP» գործումի ժամանակ, «OK» ավարտից հետո:
4:48: Դաստի հաստատությունը: Կարգավորել 3.0–5.0 վայրկյան օպտիմալ ծռումի համար:

Գործառույթային โրդեր:
1. Ինչ โրդ: Ծայրական պեդալը կառավարում է աճող շարժումներ:
2. Ենթադրվող ցիկլ․ Ավարտում է լրիվ ծռելի ցիկլը (շտապ/հաճախ նստ + ճնշում):
3. Հանգույցական โրդ․ Ստորև փորձարկում է (ոչ արտադրություն):
4. Գործիքների դասավորում:
6․28․ Վերին մոլդի ընտրություն․ Ծածկեք և ներմուծեք իրական բարձրությունը:
7․14․ Ստորին մոլդի V-աձանգի ընտրություն․
○ Կանոն․ Աձանգի լայնությունը = 8× նյութի հաստությունը (օր․, 8մմ հաստություն ունեցող 1մմ սանդղակ):
○ Փոխարինում․ Լավացրեք սկիւերները, պտտեք մոլդը և համապատասխանեցրեք նոր աձանգը վերին սահքի հետ:

5. Կալիբրացիա և փորձարկում:
14․15․ անկյունային կալիբրացիա․
○ Ծռելի փորձ (օր․, 1մմ արկանական սանդղակ, 90° թիվ):
○ Եթե սխալը >5°՝ ձեռնակում կատարեք Y առանցքի վերաշարժ (գաղտնաբառ՝ 0313), մանրամասն համեմատեք 0.5–1.0 աճումով:
15:52․ X առանցքի կալիբրացիա․ Կապույտել չափված չափականոնային սխալները։
17:47․ Պրոգրամմինգի վավերություն․ Ստուգեք յուրաքանչյուր ծուգադրումը գծագրերի դեպքում, պահպանեք համաձայնության հետ։
22:47․ Ձախ/աջ անկյունների սինխրոնիզացիա․
○ Սինխրոնացնել սլայդերի հետևությամբ սահմանափակ առանցքը (պտույտ 5 պտույտներ/ստուգեք, մինչև անկյունները համընկնեն):

6․ Դասավորության կայունությունը և ալարմացիաները
26:21․ Սիստեմի կայունություն․ Կայունության դուրսագրող վալվը պտույտագրեք ժամանակի սլաքի ուղղությամբ, մինչև կայունությունը։
Ընդհանուր ալարմացիաներ․
○ Հյութի բամբերը չի սկսվել․ Սեղմեք սկիզբ կոճակը։
○ Սլայդերը չէ գտնվել վերին դիրքում․ Վերադառնացնել վերին դիրքը գործողություններից առաջ։
○ Сervo ալարմ: Ստուգեք մեխանիկական պարսավորումներ (հաղորդվեք JUGAO-ին, եթե չի լուծվում).
Եզրակացություն
Այս ցուցանշագիրը կարևոր է ինստալյացման, կալիբրացման և խնդիրների լուծման համար T8-կառուցված CNC պրես բրեյկի համար։ Դավանական օգնության համար կապվեք JUGAO Technical Services-ի հետ։
Պրոֆեսիոնալ տիպ՝ ყանի որ ստացիանային գործունեություններից առաջ ստուգեք գործիքների չափումները և համակարգի կարգավորումները։


