















































Nopea vianmääritys ja hälytysvirheiden käsittely ET-sarjan laitteissa
Kohtaatko hälytysongelmia ET-sarjan täyssähköisessä servokäyttöisessä taivutuskoneessasi? Olette tullut oikeaan paikkaan. Tässä artikkelissa esitetään yksityiskohtainen opas siihen, kuinka voit nopeasti diagnosoida ET-sarjan hälytysongelmia ja varmistaa sileät ja tehokkaat tuotantoprosessit. Vaikka ET-sarjan hälytykset ovat yleisiä, niiden voi ratkaista nopeasti oikealla lähestymistavalla ja palauttaa laitteiston optimaaliseen suorituskykyyn. Olipa kyseessä uusi käyttäjä tai kokenut käyttäjä, joka haluaa optimoida hälytysten poistamisen prosessiaan, tämä opas tarjoaa keskeiset vaiheet erilaisten hälytysongelmien tehokkaaseen käsittelyyn.
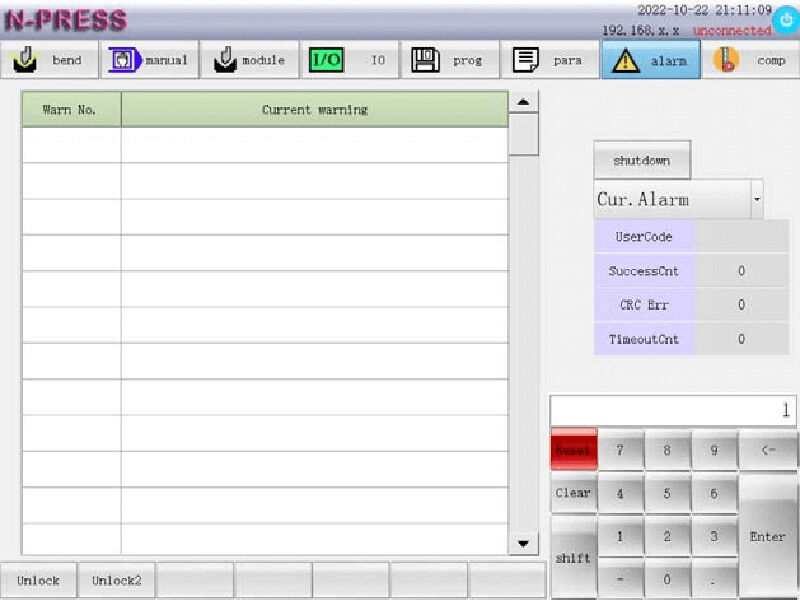
Vaihe 1: ET-sarjan hälytyskäyttöliittymän avaaminen
Napsauta 'hälytys'-toimintonäppäintä päästäksesi käyttöliittymään ja tarkastellaksesi kaikkia ET-sarjan hälytyksiä. Tämä käyttöliittymä näyttää yksityiskohtaisesti kaikki nykyiset hälytykset, hälytystallenteet sekä muut tärkeät tilastot, kuten onnistuneiden yhteyksien määrän, varmistusvirheet ja aikakatkaisut.
Analysoi hälytystallenteita
Ymmärrä hälytysten esiintymistiukkuus ja -tyyppi tarkastelemalla aiempia tallenteita. Kiinnitä erityistä huomiota ET-sarjan hälytysten varmistusvirheiden ja aikakatkaisuongelmien määrään, sillä nämä viittaavat perustavanlaatuisiin viestintäongelmiin IO-moduulin kanssa.
Onnistuneet yhteydet: Heijastaa onnistuneiden viestintäyhteyksien määrää järjestelmän ja IO-moduulin välillä ja osoittaa järjestelmän yleisen viestintäterveyden.
Varmistusvirheet: Näyttää järjestelmän ja IO-moduulin välisen dataviestinnän varmistusvirheiden määrän. Suuri virheiden määrä voi viitata tietojen eheyteen liittyviin ongelmiin, joihin on kiinnitettävä välitöntä huomiota.
Aikakatkaisuajat: Näyttää järjestelmän ja IO-moduulin välisen viestintäyhteyden virheiden määrän, mikä viittaa mahdollisiin tiedonsiirron häiriöihin, jotka voivat vaikuttaa koneen toimintaan.
Vaihe 2: ET-sarjan hälytyksen tilan tulkinta
ET-sarjan hälytyksen tehokkaaksi käsittelyksi tarkista ensin hälytystiedot virhekoodien (ERRxxx) ja varoituskoodien (ALMxxx) osalta. Viimeisimmät hälytykset on luokiteltu 'nykyiseksi hälytykseksi'. Noudata ohjeita ongelmien ratkaisemiseksi ja paina nollausnappia hälytyksen poistamiseksi, jolloin järjestelmä palautuu normaalitilaan.
Jos CNC-järjestelmässä tapahtuu vika, näytölle ilmestyy enintään viisi nykyistä hälytystä. Merkitse ylös varoituskoodi ja tee suositellut toimenpiteet tai ota tarvittaessa yhteyttä ammattimaiseen huoltohenkilökuntaan.
Noudattamalla näitä vaiheita voit selvittää ET-sarjan hälytyksen nopeasti, vähentää käyttökatkoja ja parantaa tuottavuutta.
Vaihe 3: ET-sarjan hälytysongelmien ratkaiseminen
ET-sarjan hälytys – virhekoodi
ERR001: Turvalaitteen valesuodatin -hälytys
Syy: Kun y-akseli liikkuu alaspäin, ihmisen keho tai muut esineet tulevat valaverkon alueelle.
Korjaustoimenpide: Tarkista, onko kukaan valaverkon alueella tai toimiko turvahiljat oikein.
ERR002: Y1- ja Y2-akselin sijaintipoikkeama
(Hälytys ilmestyy, kun virhe ilmenee manuaalitilassa, ja hälytys ilmestyy, kun virhe ilmenee taivutustilassa.)
Syy: Y1- ja Y2-akselin absoluuttisen koordinaattiarvon poikkeama ylittää y-akselin enimmäispoikkeaman asetettavan arvon.
Korjaustoimenpide: Tarkista ensin, ovatko Y1- ja Y2-akselien sijaintivirheet suurempia kuin sallittu toleranssi. Tarkista sen jälkeen, toimiko lineaarinen kooderi oikein vai onko se viallinen. Lopuksi tarkista, onko mekaanisessa voiman siirrossa vikaa ja onko järjestelmän parametrien Y1 ja Y2 sijaintipoikkeaman sallittu arvo asetettu liian pieneksi.
ERR003: Hälytys, kun paine ylittää työstökoneen enimmäissallitun arvon
Syy: Väärä muotti tai materiaali valittu.
Käsittely:
1. Tarkista muottien ja materiaalien valinta:
Varmista, että muotit ja materiaalit on valittu oikein.
2. Tarkista taivutuspaine:
Tarkista, onko ohjelmassa, synteesissä ja ohjelmointiliittymässä määritetty taivutuspaine liian korkea.
3. Painearvio:
Jos näytössä näkyvä paine ylittää työstökoneen sallitun rajan:
Vaihda muottia tai materiaalia.
Jos näytössä näkyvä paine on sallitulla alueella:
Tarkista ylä- ja alamuottien korkeuksien oikea asetus.
ERR004: Hälytys, kun paine ylittää muotin sallitun arvon
Syy: Väärä muotti tai materiaali valittu.
Käsittely:
1. Tarkista, onko muotti ja materiaali valittu oikein.
2. Tarkista, onko ohjelmassa, synteesissä ja ohjelmointiliittymässä määritetty taivutuspaine liian suuri.
Jos näytössä näkyvä paine ylittää muotin sallitun paineen, vaihda muotti tai materiaali.
Jos näytössä näkyvä paine on muotin sallitulla alueella, varmista, että ylä- ja alamuuottien korkeudet on asetettu oikein.
ERR005: Taivutuspaineen raja ylitetty
Syy: Väärä muotti tai materiaali valittu.
Käsittely:
1. Tarkista, onko muotti ja materiaali valittu oikein.
2. Tarkista, onko ohjelmassa, synteesissä ja ohjelmointiliittymässä määritetty taivutuspaine liian suuri.
3. Jos näytössä näkyvä paine ylittää muotin sallitun paineen, vaihda muotti tai materiaali.
4. Jos näytössä näkyvä paine on muotin sallitulla alueella, varmista, että ylä- ja alamuuottien korkeudet on asetettu oikein.
ERR006: Paineen mittauksen viestintäaikakatkaisu
Syy: Viestintä järjestelmän ja I/O-laudan välillä katkesi aikakatkaisun vuoksi.
Korjaustoimenpide: Varmista, että I/O-laudan tyyppiasetukset ovat oikein ja että 485-viestintälinjan kytkentä on kunnossa.
ERR007: Painetunnistuskanavan vika
Syy: Analogiarvo on liian alhainen.
Korjaustoimenpide: Varmista oikeat analogisen signaalilinjan liitokset.
ERR008–ERR012: X–Z2-akselin yläpuolinen kovaraja
(Varoitus ilmestyy taivutuksen aikana; varoitus ilmestyy manuaalitilassa generoidessa)
Syy: Jokaisen akselin yläpuolinen rajakytkin aktivoituu taivutuksen aikana.
Käsittely:
1. Tarkista, onko jokainen akseli siirtynyt yläpuolisen rajakytkimen alueelle.
2. Tarkista, toimivatko jokaisen akselin yläpuoliset rajakytkimet oikein.
3. Siirrä jokaista akselia manuaaliohjausliittymän avulla pois rajakytkimen alueelta.
ERR013–ERR017: X–Z1-akseli ylittää alapuolisen kovarajan
(Hälytys aktivoituu taivutuksen ja nollapisteen etsinnän aikana; hälytys aktivoituu manuaalitilanteen syntyessä)
Syy: jokaisen akselin negatiivinen rajakytkin laukesi taivutuksen aikana.
Käsittely:
1. Siirrä jokaista akselia manuaaliohjausliittymässä poistuaksesi rajakytkimen alueelta.
2. Tarkista, onko jokainen akseli siirtynyt negatiivisen rajakytkimen alueelle.
3. Tarkista, toimiko jokaisen akselin negatiivinen rajakytkin oikein.
ERR018–ERR022: X–Z2-akselin ylittänyt positiivinen pehmeä raja
Syy: jokaisen akselin konekoordinaatti ylittää järjestelmäparametrin asettaman positiivisen pehmeän rajan sijainnin.
Korjaustoimenpide: tarkista, onko jokaisen akselin järjestelmäparametrin asettama positiivinen pehmeä raja sopiva.
ERR023–ERR027: X–Z1-akselin ylittänyt negatiivinen pehmeä raja
Syy: jokaisen akselin konekoordinaatti ylittää järjestelmäparametrin asettaman negatiivisen pehmeän rajan sijainnin.
Käsittely: Tarkista, onko jokaisen akselin negatiivisen pehmeän rajan sijainti, jonka järjestelmäparametri määrittää, sopiva.
ERR028: Työkonetta koskeva erääntymisvaroitus
Syy: Työkone on erääntynyt.
Käsittely: Ota yhteys toimittajaan.
ERR029–ERR034: Jokaisen akselin servomoottorin ohjainvaroitus
Syy: Vastaavan akselin servomoottorin ohjain antaa varoituksen tai servomoottorin ohjaimen yhteys epäonnistuu.
Käsittely: Tarkista servomoottorin ohjaimen varoituksen syy tai tarkista järjestelmän ja servomoottorin ohjaimen välinen yhdistävä kaapeli.
ERR035–ERR040: Jokaisen akselin enkooderivarotus
Syy: Vastaavan akselin enkooderisignaali on virheellinen.
Käsittely: Tarkista järjestelmän ja servomoottorin ohjaimen välisten yhdistävien kaapelien enkooderiin liittyvät signaalikaapelointi.
ERR041–ERR046: Ei-liiketilassa olevan servon poikkeama-alarmi kullekin akselille
Syy: Kun vastaava akseli ei saa liikekäskyä, se havaitsee, että takaisinkytketty koordinaatti on poikkeuksellinen.
Korjaustoimenpide: Tarkista enkooderin yhdistävä kaapeli.
ERR047–ERR052: Liiketilassa olevan servon poikkeama-alarmi kullekin akselille
Syy: Kunkin akselin sijaintituloksen seuranta-alarmi.
Korjaustoimenpide: Tarkista, onko sijaintituloksen seuranta-ajan sallittu arvo asetettu liian pieneksi.
ERR053: Virtakatkoksi ilmoitettava hälytys
Syy: Järjestelmän virtalähteen jännitettä on havaittu liian alhaiseksi.
Korjaustoimenpide: Tarkista, onko virtalähde toiminnassa normaalisti.
ERR054: Järjestelmähälytys
Syy: Järjestelmän sisäinen poikkeus.
Käsittely: Ota yhteys toimittajaan.
ERR055: Hälytys hätäpysäytyksestä
Syy: Havaittu, että hätäpysäytysnäppäintä on painettu.
Korjaustoimenpide: Tarkista, onko hätäpysäytysnäppäintä painettu.
ERR056: Torquen rajoituksen ylitys
Syy: Moottorin enimmäistorque ylitetään.
Korjaustoimenpide: Tarkista, onko y-akselin nopeus tai kiihtyvyys asetettu liian suureksi.
ERR057: Z1:n ja Z2:n välinen etäisyys on liian pieni
Syy: Manuaaliohjaustilassa manuaalisessa ohjauksessa z-akselin liike ylittää järjestelmäparametrin 603 (z1z2) turvavälin.
Korjaustoimenpide: Tarkista, ovatko järjestelmäparametreilla asetetut arvot sopivia.
ERR059: Erääntymisvaroitus
Syy: Järjestelmän käyttöaika on alle 2 päivää.
Toimenpide: Ota yhteys toimittajaan.
ERR060: Takavaihde 2 ylittää negatiivisen pehmeän rajan
Syy: Kun käytetään takavaihdetta 2, koneen x-akselin koordinaatti ylittää järjestelmäparametrin määrittämän x-akselin negatiivisen pehmeän rajan sijainnin.
Toimenpide: Tarkista, onko takavaihde valittu asianmukaisesti.
ERR061: Turvat oven hälytys
Syy: Turvat ovi avattiin käytön aikana.
Toimenpide: Tarkista, onko turvat ovi suljettu.
ERR062: Ilmastointihälytys
Syy: Ilmastointilaitteen vikaantuminen.
Toimenpide: Tarkista ilmastointilaite.
ERR063: Poikkeaman kompensoinnin aikakatkaisu
Syy: Poikkeaman kompensointia ei voida suorittaa pitkään aikaan.
Toimenpide: Tarkista, onko poikkeaman kompensoinnin tarkkuus asetettu liian pieneksi.
ERR064: Poikkeaman kompensoinnin suuntavirhe
Syy: Poikkeaman kompensointimoottorin pyörimissuunnan virhe.
Toimenpide: Tarkista, onko poikkeaman kompensointimoottorin kytkentä oikein.
ERR065: Hälytys 1 hätäpysäytyksestä
Syy: Hälytyksen 1 hätäpysäytys -tulossignaali on voimassa.
Käsittely: Tarkista hätäpysäytysvaroituksen 1 syöttösignaali.
ET-sarjan varoitus – Varoituskoodeja
ALM001–ALM006 X–Z2-akselin nollakohtahaku epäonnistui
Mahdollinen syy: Järjestelmä ei tunnista vastaavan akselin nollakohtasignaalia hakuprosessin aikana tai vastaavan akselin nollakoordinaatti on asetettu väärin.
Käsittely: Tarkista, onko järjestelmäparametreissa määritetty vastaavan akselin kolmannen osion hakumatka pienempi kuin yksi kierre. Tarkista myös vastaavan akselin nollakoordinaatit.
ALM007–ALM011 X–Z2-akselin liian suuri positiivinen kovaraja
Mahdollinen syy: Vastaavan akselin positiivinen rajakytkin aktivoituu käsinohjattuessa.
Käsittely: Tarkista, onko vastaava akseli siirtynyt positiivisen rajakytkimen alueelle tai onko akselin positiivinen rajakytkin viallinen. Siirrä vastaavaa akselia käsinohjattavassa käyttöliittymässä ulos rajakytkimen alueelta.
ALM012–ALM016 X–Z1-akselin liian suuri negatiivinen kovaraja
Mahdollinen syy: Vastaavan akselin negatiivinen rajakytkin aktivoituu käsinohjattuessa.
Käsittely: Tarkista, onko vastaava akseli saapunut negatiivisen rajakytkimen alueelle tai onko akselin negatiivinen rajakytkin viallinen. Siirrä vastaavaa akselia manuaaliohjausliittymässä poistuaksesi rajakytkimen alueelta.
ALM017–ALM021 X–Z2-akselin liian suuri positiivinen pehmeä raja
Syy: Vastaavan akselin eteenpäin suuntautuva pehmeä raja on aktivoitunut manuaalitilassa.
Käsittely: Siirrä vastaavaa akselia manuaaliohjausliittymässä poistuaksesi pehmeältä rajalta ja tarkista, onko järjestelmäparametreissa asetettu pehmeä raja sopiva.
ALM022–ALM026 X–Z1-akselin liian suuri negatiivinen pehmeä raja
Syy: Vastaavan akselin negatiivinen pehmeä raja on aktivoitunut manuaalitilassa.
Käsittely: Siirrä vastaavaa akselia manuaaliohjausliittymässä poistuaksesi pehmeältä rajalta ja tarkista, onko järjestelmäparametreissa asetettu pehmeä raja sopiva.
ALM027 Y1- ja Y2-akselien paikannuspoikkeama ylittää rajan
Syy: Y1- ja Y2-akselien absoluuttisten koordinaattiarvojen poikkeama ylittää Y-akselin maksimipoikkeama-asetusarvon manuaalitilassa.
Käsittely: Tarkista, poikkeavatko Y1- ja Y2-akselien sijaintivirheet sallitusta toleranssista; varmista, onko lineaarinen kooderi toimintakyvytön; tarkista mekaanisen voimansiirron toiminta. Siirrä Y1- ja Y2-akseleita suuntaan, joka vähentää akselin suuntaista sijaintipoikkeamaa.
ALM028–ALM033 X–Z2-akselin nollakohtasijainnin poikkeama ylittää rajan
Syy: Viitteen pisteen tilassa vastaavan akselin konekoordinaattiarvo origon etsinnän jälkeen eroaa merkittävästi järjestelmäparametreissa 260–263 ja 608–609 tallennetusta arvosta.
Käsittely: Tarkista, onko järjestelmäparametrit 260–263 ja 608–609 asetettu oikein.
ALM034 Voitelupumpun varoitus
Syy: Voitelupumpun antopaine on riittämätön.
Käsittely: Tarkista, onko voiteluvoide loppunut. Jos näin on, lisää No. 00 erityisen korkeapaineinen litiumpohjainen voiteluvoide. Jos ei ole, tarkista, toimiiko voitelupumppu normaalisti, vuotaaako voiteluputki ja onko voitelupumpun signaalikaapeli kytketty oikein.
ALM035 Työkalua ei ole kiinnitetty
Syy: Hydraulisen työkalupidikkeen kiinnityssignaalia ei havaita.
Toimenpide: Tarkista, onko hydraulisen työkalupidikkeen kiinnityssignaalin kytkentä oikein.
ALM036 ZLZ2: Liian pieni etäisyys
Syy: Z-akseli manuaalisessa ohjaustilassa ylittää järjestelmäparametrin 603 (z1z2) määrittämän turvavälin.
Toimenpide: Tarkista, ovatko järjestelmäparametrien asetukset sopivia.
ALM037 Turvalaitteiston valesiru-vaaramerkintä
Syy: Valesiru-signaali havaitaan voimassa olevaksi.
Toimenpide: Tarkista, onko valesiru esteen takana.
ALM039 Eräpäivän ylitys-varoitus
Syy: Järjestelmän käyttöaika on alle 2 päivää.
Toimenpide: Ota yhteys toimittajaan.
ALM039 Taipumakorjaus: positiivinen raja
Syy: Poikkeaman kompensointimekanismi ylittää positiivisen rajan.
Toimenpide: Tarkista poikkeaman kompensointimekanismin liikesuunta ja sen, onko rajasignaalien kytkentä oikein.
ALM040 Poikkeaman kompensointi – negatiivinen raja
Syy: Poikkeaman kompensointimekanismi ylittää negatiivisen rajan.
Toimenpide: Tarkista poikkeaman kompensointimekanismin liikesuunta ja sen, onko rajasignaalien kytkentä oikein.
ALM041 Poikkeaman kompensointi
Syy: Ilmoitus poikkeaman kompensoinnista.
Toimenpide: Tarkista, onko poikkeaman kompensoinnin tarkkuusasetus liian pieni.
ALM042 Y-akselin kallistuma
Syy: Y-akselin kallistumasyöte on voimassa.
Toimenpide: Tarkista, ovatko Y1 ja Y2 yhdensuuntaisia ja onko nollakohtaan asettaminen tehty oikein.
Johtopäätös
Yhteenvetona ET-sarjan muottialarmien nopean vianmäärityksen avain on ymmärtää perusvaiheet, joilla yleisimmät viat voidaan tunnistaa ja korjata tehokkaasti. Noudattamalla tässä artikkelissa esitettyjä menettelyjä – kuten johdotusliitosten tarkistamista, järjestelmäparametrien kalibrointia ja säännöllistä huoltoa – voit vähentää käyttökatkoja ja varmistaa tuotannon tehokkuuden.
Lisäapua tai tarkempaa teknistä tietoa varten ota rohkeasti yhteyttä tekniseen tukeemme, JUGAO CNC MACHINE -yritykseen. Olemme valmiita tarjoamaan sinulle ammattimaisia neuvoja ja lisäresursseja, jotta voit käyttää tuotteitamme tehokkaammin. Voit myös tutustua muihin teknisiin asiakirjamiimme saadaksesi lisätietoa taivutuskoneiden huollosta ja suorituskyvyn optimoinnista.

