















































Pressbrake servo süsteemi rikete diagnoosimine: Täielik juhend
Ülevaade
Sisukord
1. Tavaliste pressipurkuri servo süsteemi rikeste tuvastamine
1.1 Tüüpilised servo häirerežiimid CNC pressipurkurtel
2. Samm-sammult toimuv diagnostiline protsess pressipurkuri servo süsteemi rikeste korral
2.1 Üle vaadata servo juhtseadme häirekoodid
2.2 Kontrollida servo mootori juhtmete ja ühendusliideste olekut
2.3 Kontrollida kodeerija tagasiside signaale
3. Pressipurkuri servo süsteemi rikeste mehaanilised põhjused
3.1 Hõõrdumisvastupärasus tagasenihiku lineaarjuhtpaeladel
3.2 Kuulmutterite ühendamise vale paigutus
4. Servomootori parameetrite vead ja kalibreerimispuudused
4.1 Servomootori parameetrite seadistusprobleemid
4.2 Tagasenäitaja asukoha kalibreerimise kõrvalekalded
5. Servosüsteemi rikete vältimise ennetavad strateegiad
5.1 Planeeritud elektrilised kontrollid
5.2 Õljustus ja mehaaniline hooldus
5.3 Servomootori temperatuuri ja koormuse reaalajas jälgimine
6. Sageli küsitavad küsimused
6.1 Millised on levinuimad põhjused presspurkade servosüsteemi rikete tekkimisel?
6.2 Kas mehaaniline takistus võib aktiveerida servomootori hoiatussignaale?
6.3 Mis on kiiraim viis servo süsteemi rikke diagnoosimiseks?
6.4 Kui sageli tuleb CNC JUGAO pressi pöörde servo süsteemi kontrollida?
7. Järeldus
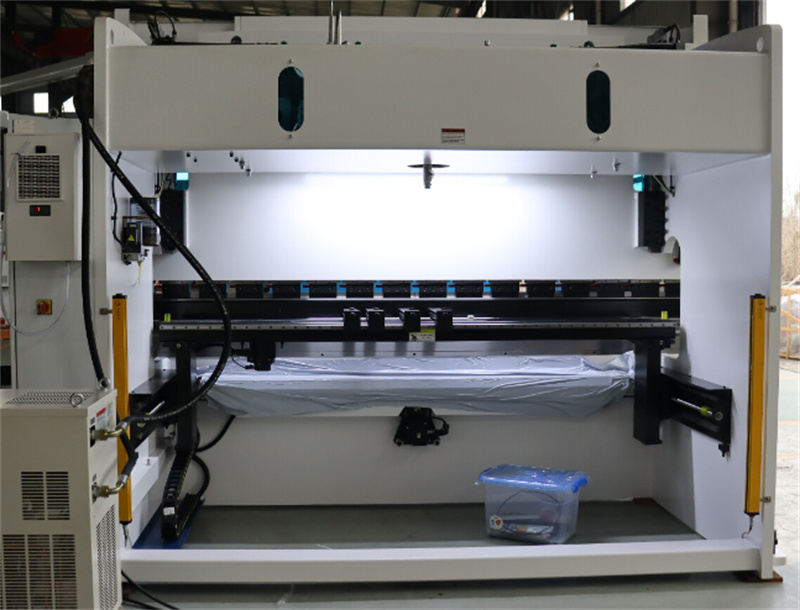
Kui CNC JUGAO pressi pöörde operaatorid kohtuvad servo süsteemi rikkega, peatub tootmine kohe ja paljudel on raske määrata, kust probleemide lahendamist alustada. Põhinedes laialdasel praktilisel kogemusel CNC pressi pöördetehnika kasutamisega põhineb suur osa servo süsteemi häirete teadete andmisest lihtsatel probleemidel – näiteks kodeerija riketest, juhtmete vigadest, valest servo parameetritest või liialt suurest mehaanilisest takistusest. See juhend kirjeldab süstemaatilist, samm-sammult toimivat lähenemist pressi pöörde servo süsteemi rikete diagnoosimisele ja kõrvaldamisele, võimaldades operaatoritel kiiresti taastada masina töökindluse, säilitades samas täpse positsioneerimise ja servo mootori stabiilsuse.
Tavaliste pressi pöörde servo süsteemi rikete tuvastamine
Enne igasuguste remonttööde alustamist on esimene kriitiline samm tuvastada CNC-juhtsüsteemil näidatud konkreetne servoaviga. Kaasaegsed pressipurgid kasutavad kahte põhifunktsiooni jaoks peamiselt servomootoreid: tagasenäitaja süsteemi toitmiseks ja hüdraulilise sünkroonkontrolli võimaldamiseks.
Tüüpilised servoalarmirežiimid CNC-pressipurgitel
Kõige levinumad servoalarmid, mis on seotud pressipurgi süsteemi vigadega, hõlmavad:
• Servoülekoormusalarmid
• Kooderite suhtluse häired
• Asukohakõrvalekaldumise alarmid
• Servojuhtseadme ülekuumenemine
• Servomootori ülekorrentkaitse
Iga alarmitüüp viitab erinevale alusepõhjusele. Peamiste juhtsüsteemide (sh Delem, ESA ja Cybelec süsteemide) ekraanil kuvatavate alarmikoodide tõlgendamine on oluline, et lihtsustada veadiagnostika protsessi ja vältida tarbetuid kontrollioperatsioone.
Samm-sammult toimuv diagnostikaprotsess pressipurgi servo süsteemi vigade korral
Servosüsteemi probleemide diagnoosimine nõuab struktureeritud lähenemist, et vältida ebavajalikku komponentide vahetamist ja minimeerida seadme töökatkestusi. Järgnev samm-sammult toimuv protsess tagab loogilise ja tõhusa diagnoosi.
2.1 Üle vaadata servo juhtseadme häirekoodid

Esmaseks sammeks on kontrollida alarmiteateid, mis kuvatakse nii servomootori juhtpaneelil kui ka CNC-juhtimisüksusel. Enamik servomootoreid on varustatud üksikasjalike diagnostikakoodidega, mis annavad olulisi vihjeid rikke kohta. On oluline dokumenteerida kolm võtmetähtsat teavet:
• konkreetne alarmikood
• masina tööolek masinal tekkiva alarmi hetkel (nt paus, painutamine, tagasenäitaja seadistus)
• mõjutatud telg (nt X-telje tagasenäitaja, R-telje kõrgusseadistus)
See dokumentatsioon aitab kohe kindlaks teha, kas rike põhjustas elektrilised probleemid, mehaanilised rikked või vale parameetrite konfigureerimine.
2.2 Kontrollida servo mootori juhtmete ja ühendusliideste olekut

Lõtvad või kahjustatud kaablid on üks sagedasemaid põhjusi, mille tõttu pressipurkuri servo süsteemis tekkevad rikkeid. Põhjalik inspektsioon peaks keskenduma järgmistele:
• Servomootori toitekaablid
• Enkooderi tagasisidekaablid
• Elektrilises juhtimiskapis olevad terminalplaadid
Pidev masina vibreerimine pikaajalisel töötamisel võib aeglaselt löövad ühendused ja terminalid lahti. Lihtsalt lõtvate ühenduste kinnitamine ja kulunud või kahjustatud kaablite asendamine lahendab sageli ajutisi servo rikkeid, mida muul viisil on raske tuvastada.
2.3 Kontrollida kodeerija tagasiside signaale
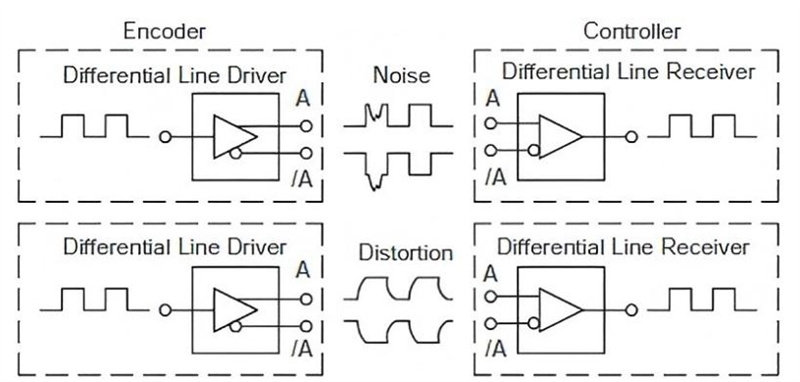
Servomootorid sõltuvad täpsest enkooderi tagasisideandmestest, et tagada pressipurkuri toimingute jaoks vajalik kõrgtäpsuslik positsioneerimine. Ebastabiilsed enkooderi signaalid põhjustavad mitmesuguseid rikkeid, sealhulgas:
• Asukohakõrvalekaldumise alarmid
• Telgede sünkroonimisvead
• Ootamatud, plaanipäraselt toimuvad servomootorite seiskumised
Kooderi probleemide diagnoosimiseks kontrollige kõiki kooderi ühendusi tiheduse ja kaablite õlisuse, kahjustuste või muude mehaaniliste vigade suhtes. Kui visuaalne inspektsioon ei anna vihjeid, kasutage servojuhtme sisseehitatud diagnostikamenüüd signaalitesti tegemiseks ja kooderi töökindluse kontrollimiseks.
Mehaanilised põhjused pressipurkuri servo süsteemi rikestes
Mitte kõik servo süsteemi riked ei ole elektroonilist laadi – liialine mehaaniline takistus on levinud ja sageli eiratud põhjus servo hoiatussignaalide tekkimisel. Mehaaniliste probleemide lahendamine on oluline normaalse servo toimimise taastamiseks ja korduvate rikeste ennetamiseks.
3.1 Hõõrdumisvastupärasus tagasenihiku lineaarjuhtpaeladel
Tagasenäitaja lineaarsed juhisraudad on igapäevases töös kalduvad koguma tolmu, metalliõrnasid ja prügi; piisamatu lubrikatsioon teeb seda probleemi veelgi tõsisemaks. Kui takistus suureneb, peab servo mootor rakendama lisajõudu tagasenäitaja telje liigutamiseks, mis põhjustab sageli:
• Servoülekoormusalarmid
• Ebanormaalset servo mootori ülekuumenemist
• Aeglast tagasenäitaja asendamiskiirust
Juhtpaelade põhjalik puhastamine kogu mustuse eemaldamiseks ja tootja soovitud lubrikandi rakendamine kuulmutridel ja juhtpaelade komponentidel vähendab oluliselt hõõrdumisvastust ning taastab servo süsteemi tavapärase tööoleku.
3.2 Kuulmutterite ühendamise vale paigutus
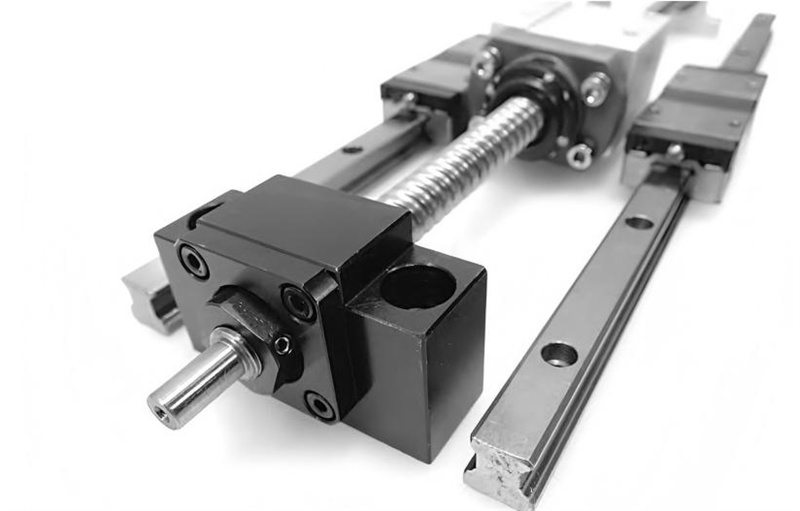
Vigane paigaldus masina seadistamisel või pikaajalise kasutamise tõttu tekkiv kulutus võib põhjustada kuulmutri vale paigutuse – veel ühe suurema mehaanilise vastupanu allika. Selle probleemi diagnoosimiseks tuleb kontrollida järgmisi peamisi komponente:
• Kuulmutri sirgus
• Servomootori ja kuulmutri ühendavat liitumist
• Kuulmutri mõlema otsa kullerite kulutustase
Kuulmutri vale paigutuse kõrvaldamine ja kulunud kullerite asendamine eemaldavad servo mootorile liialdatud koorma, takistades ülekoormusalarme ja pikendades mootori kasutusiga.
Servo parameetrite vead ja kalibreerimispuudused
Vale servo parameetrite seadistus on ülesehituse servo süsteemi rikkepeamise põhjus, eriti pärast masina hooldust, komponentide vahetust või CNC-tarkvara uuendusi. Isegi väikesed kõrvalekalded soovitud parameetritest võivad häirida tervet servo süsteemi.
4.1 Servomootori parameetrite seadistusprobleemid
Valesti seadistatud parameetrid, mis puudutavad kiirendust, kiirusepiiranguid või asukoha tolerantsi, põhjustavad kohe servo hoiatussignaale ja takistavad masina tööd. Põhiparameetrid, mille õigsust tuleb kontrollida ja uuesti kalibreerida, on:
• Servo võimendusparameetrid
• Kiirendus- ja aeglustusseaded
• Asukoha kõrvalekaldumise tolerantsipiirid
Kõik parameetrid tuleb seadistada täpselt pressipurki tootja soovitud väärtustele, et tagada sujuv servo süsteemi töö.
4.2 Tagasenäitaja asukoha kalibreerimise kõrvalekalded

Kui tagasemõõturi asukohaviitepunkt muutub mehaanilise liikumise või elektriliste rikeste tõttu ebatäpsaks, tuvastab CNC-juhtimisseade ebakorraliku asukonna kõrvalekaldumise ja aktiveerib häireteate. Selle probleemi lahendamiseks tuleb teha täielik kalibreerimisprotsess, mis hõlmab:
• Telje nullpunkti taastamise kalibreerimist
• Tagasemõõturi asukohaviitepunkti täielikku lähtestamist
• Asukoha täpsuse kontrollimist täppismõõtetööriistadega
Õige kalibreerimine tagab, et servo süsteem töötab tootja määratud tolerantsvahemikus, elimineerides valede asukohakõrvalekaldumiste häireteated.
Ennetavad strateegiad servo süsteemi rikete vähendamiseks
Presspurkese servo süsteemi rikete ennetamine on palju tõhusam ja kuluefektiivsem kui nende remont planeerimata tootmispause ajal. Proaktiivse ennetava hooldusprogrammi rakendamine on parim viis tagada pikaajalist servo süsteemi stabiilsust.
5.1 Planeeritud elektrilised kontrollid
Regulaarsed elektrijuhtimiskabiini ja servo süsteemi elektriliste komponentide kontrollid on olulised. Keskkond peab tagama:
• Servomootori juhtseadme takistuseta ja tõhusa jahutamise
• Ventilatsioonifiltrite puhtuse, et vältida tolmu kogunemist
• Kõigi elektriliste kontaktide ja kaablite kindla ja pingutatud ühenduse
Tolmu kogunemine juhtimiskabiinis võib põhjustada ülekuumenemist ja suheldes ebastabiilsust, mis viib ajutistele või püsivatele servo riketele. Soovitatakse nädalasüsteemselt visuaalseid kontrollisid ja kuu tagant põhjalikku puhastust.
5.2 Õljustus ja mehaaniline hooldus
Kõigi liikuvate mehaaniliste komponentide õige õlitamine vähendab oluliselt servomootorile mõjuvat koormust ja takistab liialt suurt kulutumist. Põhiline hooldustöö hõlmab:
• Kuulmutridel oleva mustuse regulaarset eemaldamist
• Liikumisjuhtmete regulaarset õlitamist sobiva õliga
• Metallipuru ja muu mustuse kiiret eemaldamist kõigist tagasenäitaja ja paindemehhanismi liikuvatest osadest
See igapäevane hooldus vähendab servo süsteemile mõjuvaid ebavajalikke mehaanilisi koormusi ning vähendab ülekoormuse ja ülekuumenemise hoiatuste tekkimise riski.
5.3 Servomootori temperatuuri ja koormuse reaalajas jälgimine
Peaaegu kõik kaasaegsed CNC põhjapresside juhtseadmed pakuvad reaalajas jälgimisfunktsiooni servo mootori temperatuuri ja koormustaseme kohta. Töötajad ja hooldusteamid peaksid neid näitajaid regulaarselt kontrollima; mistahes ebatavaline, äkiline temperatuuri või koormuse tõus viitab aluseks olevale probleemile (nt mehaaniline takistus, juhtmete rike).
Selliste hoiatuste märkide viivitamatu uurimine ja kõrvaldamine takistab väikeste probleemide arengut tõsisemateks servo süsteemi riketeks ning planeerimata tootmiskatkestusteks.
Tavaliselt esinevad küsimused
6.1 Millised on levinuimad põhjused presspurkade servosüsteemi rikete tekkimisel?
Käsitööliku tööstuskogemuse põhjal on kolm enim levinud põhjust: lahti olevad enkooderi tagasisidekaablid, tagasenihiku mehaaniliste komponentide piisamatu õlmine ning vale servo parameetrite seadistus. Need kolm probleemi põhjustavad igapäevases töös suurimat osa servo hoiatustest.
6.2 Kas mehaaniline takistus võib aktiveerida servomootori hoiatussignaale?
Jah, mehaaniline takistus on suur põhjus servoalarmide tekkeks. Kui kuulmutterid, lineaarjuhtmed või muud liikuvad komponendid saastuvad, kallutuvad või kuluvad, peab servo mootor töötama liiga suure koormuse all. See lisakoormus põhjustab otseselt servoülekoormusalarme ja võib kaasa tuua teiseseid probleeme, näiteks mootori ülekuumenemise.
6.3 Mis on kiiraim viis servo süsteemi rikke diagnoosimiseks?
Alustage servojuhtme alarmkoodi registreerimisega ja tõlgendamisega – see on üheks olulisemaks sammuks vea põhjuse kindlakstegemiseks. Järgmisena kontrollige kõiki juhtmeid ja enkooderi ühendusi lahtiste või kahjustatud ühenduste suhtes ning kontrollige liialt suurt mehaanilist takistust mõjutatud teljel. Seadistage servo parameetreid ainult pärast elektriliste ja mehaaniliste probleemide välistamist, et vältida tarbetuid parameetrite muutusi.
6.4 Kui sageli tuleb CNC JUGAO pressi pöörde servo süsteemi kontrollida?
Tavaliste tootmisetingimuste korral soovitatakse servo süsteemi (sh juhtmete, ühenduste ja mehaaniliste komponentide puhtuse) põhjalikku visuaalset kontrolli iga nädala tagant. Täielikum ennetav hoolduskontroll – sealhulgas õlisemine, kodeerija signaalide testimine, parameetrite kontroll ja temperatuuri/koormusandurite kalibreerimine – tuleks teha iga kuu tagant.
Kohustuslik väljaandmine
Puristuspressi servo süsteemi rike võib häirida tootmisgraafikuid ja ohustada metalli painutamisoperatsioonide täpsust, kuid suur osa neist probleemidest saab kiiresti ja tõhusalt lahendada struktureeritud, samm-sammult läbi viidava veaparandusmeetodiga. Esmalt servo alarmkoodide tõlgendamisega, seejärel juhtmete ja kodeerija tagasiside signaalide inspekteerimisega, liialise mehaanilise takistuse kõrvaldamisega ning servo parameetrite konfiguratsiooni kontrollimisega saavad töötajad ja hooldusteamid täpselt tuvastada ja parandada enamikku vigu minimaalse seiskumisajaga.
Proaktiivne ja regulaarne ennetav hooldus on pikaajalise servo süsteemi stabiilsuse ja usaldusväärsuse alus. Kui järgida kindlaksmääratud elektriliste kontrollide, pideva mehaanilise õlituse ja hoolduse ning servo temperatuuri ja koormuse reaalajas jälgimise grafikuid, saavad ettevõtted oluliselt vähendada servo rikeid ja tagada oma JUGAO pressipuksi töö katkematuse. Kui püsivaid või keerukaid servo süsteemi probleeme ei saa lahendada lihtsa veaparandusega, soovitatakse pöörduda professionaalse tehnilise toe meeskonna poole, et tagada täpne diagnostika ja tõhus lahendus, mis vähendab tootmiskaotusi ja kaitseb masina pikaajalist töökindlust.

