















































Hurtig diagnose og håndtering af alarmpåvirkninger i ET-serien
Kæmper du med alarmproblemer på din ET-serie fuldelektriske servobøjemaskine? Så er du kommet til det rigtige sted. I denne artikel får du en detaljeret vejledning i, hvordan du hurtigt kan fejlfinde alarmproblemer på ET-serien, så produktionen forløber smidigt og effektivt. Selvom alarmer på ET-serien er almindelige, kan du med den rigtige fremgangsmåde hurtigt løse dem og genoprette din udstyrs optimale ydelse. Uanset om du er ny på dette system eller ønsker at optimere din fejlfindingsproces, giver denne vejledning de nøgletrin, der hjælper dig effektivt med at håndtere forskellige alarmproblemer.
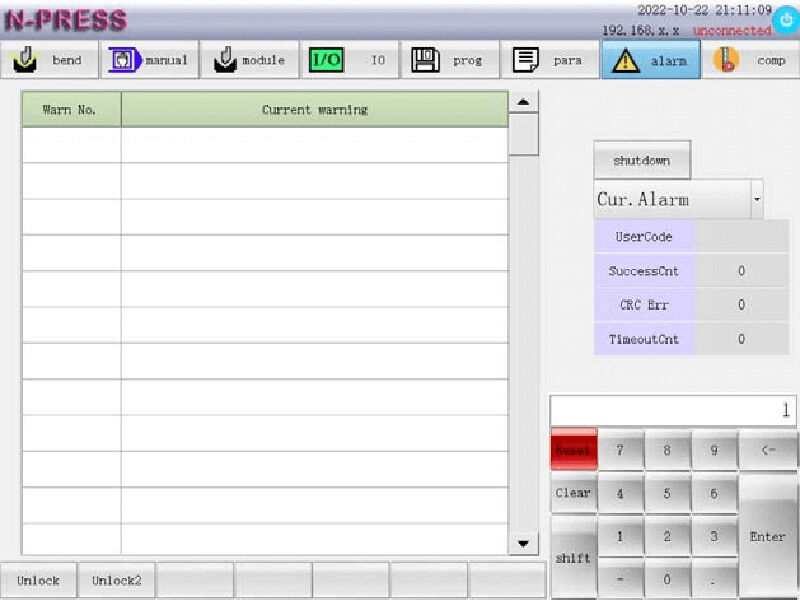
Trin 1: Adgang til ET-seriens alarmgrænseflade
Klik på funktionstasten 'alarmer' for at åbne grænsefladen og se alle alarmer for ET-serien. Denne grænseflade viser en omfattende oversigt over aktuelle alarmer, alarmlogge samt andre vigtige statistikker som antal vellykkede kommunikationer, verificeringsfejl og timeout-perioder.
Analyser alarmlogge
Forstå hyppigheden og typen af alarmer ved at gennemgå tidligere logge. Vær særlig opmærksom på antallet af verificeringsfejl og timeout-problemer for alarmer i ET-serien, da disse indikerer underliggende kommunikationsproblemer med IO-modulet.
Antal vellykkede kommunikationer: Viser antallet af vellykkede kommunikationer mellem systemet og IO-modulet og afspejler dermed systemets generelle kommunikationsstatus.
Verificeringsfejl: Viser antallet af verificeringsfejl i datakommunikationen mellem systemet og IO-modulet. Et stort antal fejl kan tyde på problemer med dataintegriteten, som kræver øjeblikkelig opmærksomhed.
Timeout-tider: Viser antallet af kommunikationsforbindelsesfejl mellem systemet og IO-modulet, hvilket signalerer potentielle forstyrrelser i dataoverførslen, der kan påvirke maskinens drift.
Trin 2: Fortolkning af ET-seriens alarmstatus
For at håndtere ET-seriens alarm effektivt skal du først kontrollere alarmoplysningerne for fejlkoder (ERRxxx) og advarselkoder (ALMxxx). De seneste alarmer vises som 'Nuværende alarm'. Følg instruktionerne for at løse problemerne, og tryk på nulstillingstasten for at rydde alarmen og gendanne systemets normaldrift.
Hvis der opstår en fejl i CNC-systemet, vises op til fem nuværende alarmer. Registrer advarselkoden og udfør den anbefalede handling, eller kontakt professionel vedligeholdelsespersonale, hvis det er nødvendigt.
Ved at følge disse trin kan du hurtigt fejlfinde ET-seriens alarm, reducere stoppetid og øge produktiviteten.
Trin 3: Løsning af problemer med ET-seriens alarm
ET-seriens alarm – fejlkode
ERR001: Sikkerhedslysforhæng-alarm
Årsag: Når y-aksen kører nedad, træder menneskekroppen eller andre genstande ind i lysgardinområdet.
Løsning: Kontroller, om der er nogen i lysgardinområdet, eller om sikkerhedsgitteret fungerer forkert.
ERR002: Afvigelse i position for Y1- og Y2-akse
(Alarm vises, når fejlen opstår i manuel tilstand, og alarm vises også, når fejlen opstår under bøjning.)
Årsag: Den absolutte koordinatværdi-afvigelse for Y1-aksen og Y2-aksen overstiger den maksimale tilladte afvigelsesværdi for y-aksen.
Løsning: Kontroller først, om positionsfejlen for Y1- og Y2-aksen er uden for tolerancegrænsen. Derefter kontrolleres, om lineær encoder fungerer korrekt, eller om den er ugyldig. Til sidst undersøges, om der er en fejl i den mekaniske transmission, og om den tilladte værdi for positionsafvigelsen i systemparametrene for Y1 og Y2 er sat for lavt.
ERR003: Alarm, når trykket overstiger den maksimale tilladte værdi for maskinværktøjet
Årsag: Forkert værktøj eller materiale valgt.
Behandling:
1. Verificér form og materialevalg:
Sørg for, at formen og materialet er valgt korrekt.
2. Kontroller bøjetrykket:
Undersøg, om bøjetrykket i programmet, syntesen og programmeringsgrænsefladen er for højt.
3. Trykberegning:
Hvis det viste tryk overstiger værktøjsmaskinens tilladte grænse:
Udskift formen eller materialet.
Hvis det viste tryk ligger inden for den tilladte tolerance:
Verificér den korrekte indstilling af øvre og nedre dies højde.
ERR004: Alarm, når trykket overstiger formens tilladte værdi
Årsag: Forkert værktøj eller materiale valgt.
Behandling:
1. Kontroller, om formen og materialet er valgt korrekt.
2. Kontroller, om bøjetrykket i programmet, syntesen og programmeringsgrænsefladen er for stort.
Hvis det viste tryk overstiger det tilladte tryk for formen, skal formen eller materialet udskiftes.
Hvis det viste tryk ligger inden for det tilladte trykområde for formen, skal du sikre dig, at højden på den øverste og den nederste form er indstillet korrekt.
ERR005: Bøjetryksgrænse overskredet
Årsag: Forkert værktøj eller materiale valgt.
Behandling:
1. Kontroller, om formen og materialet er valgt korrekt.
2. Kontroller, om bøjetrykket i programmet, syntesen og programmeringsgrænsefladen er for stort.
3. Hvis det viste tryk overstiger det tilladte tryk for formen, skal du udskifte formen eller materialet.
4. Hvis det viste tryk ligger inden for det tilladte trykområde for formen, skal du sikre dig, at højden på den øverste og den nederste form er indstillet korrekt.
ERR006: Timeout ved trykdetectionskommunikation
Årsag: Kommunikations timeout mellem systemet og IO-kortet.
Løsning: Sørg for korrekte indstillinger af IO-korttype og korrekte tilslutninger af 485-kommunikationsledningen.
ERR007: Fejl i trykdetekteringskanal
Årsag: Den analoge værdi er for lav.
Løsning: Bekræft, at de analoge signalkabler er korrekt tilsluttet.
ERR008–ERR12: X–Z2-aksen overskrider den positive hårde grænse
(Alarm udløses ved bøjning; alarm udløses også i manuelt tilstand)
Årsag: Den positive grænsekontakt for hver akse aktiveres under bøjning.
Behandling:
1. Kontroller, om hver akse er trådt ind i området for den positive grænsekontakt.
2. Kontroller, om den positive grænsekontakt for hver akse fungerer forkert.
3. Brug den manuelle kontrolgrænseflade til at bevæge hver akse ud af området for grænsekontakten.
ERR013–ERR017: X–Z1-aksen overskrider den negative hårde grænse
(En alarm aktiveres ved bøjning og nulpunktsfinding; en alarm aktiveres, når manuel tilstand aktiveres)
Årsag: Den negative grænsekontakt for hver akse udløses under bøjning.
Behandling:
1. Flyt hver akse i den manuelle kontrolgrænseflade for at forlade området for grænsekontakten.
2. Kontroller, om hver akse bevæger sig ind i området for den negative grænsekontakt.
3. Kontroller, om den negative grænsekontakt for hver akse er defekt.
ERR018–ERR022: X–Z2-aksen overskrider positiv softwaregrænse
Årsag: Maskinkoordinaten for hver akse overskrider den positive softwaregrænseposition, der er indstillet via systemparameteren.
Løsning: Kontroller, om den positive softwaregrænseposition for hver akse, der er indstillet via systemparameteren, er korrekt.
ERR023–ERR027: X–Z1-aksen overskrider negativ softwaregrænse
Årsag: Maskinkoordinaten for hver akse overskrider den negative softwaregrænseposition, der er indstillet via systemparameteren.
Behandling: Kontroller, om den negative bløde grænseposition for hver akse, der er indstillet via systemparameteren, er korrekt.
ERR028: Alarm for forfaldet værktøjsmaskine
Årsag: Værktøjsmaskinen er forfaldet.
Behandling: Kontakt venligst leverandøren.
ERR029–ERR034: Alarm fra servodriveren for hver akse
Årsag: Servodriveren for den pågældende akse udløser en alarm, eller forbindelsen til servodriveren er fejlbehæftet.
Behandling: Kontroller årsagen til servodriverens alarm, eller kontroller tilslutningskablet mellem systemet og servodriveren.
ERR035–ERR040: Encoderalarm for hver aksel
Årsag: Signalet fra encoderen for den pågældende aksel er forkert.
Behandling: Kontroller ledningsføringen for encoderrelaterede signaler i tilslutningskablet mellem systemet og servodriveren.
ERR041-ERR046: Servo-fejlsignal i ikke-bevægelsesmodus for hver akse
Årsag: Når den pågældende akse ikke modtager en bevægelseskommmando, registreres det, at de tilbageførte koordinater er unormale.
Løsning: Kontroller kablet til encoderen.
ERR047-ERR052: Servo-fejlsignal i bevægelsesmodus for hver akse
Årsag: Positionspåfølgningfejl for hver akse.
Løsning: Kontroller, om den tilladte værdi for positionspåfølgningfejl er indstillet for lavt.
ERR053: Strømudfaldsalarm
Årsag: Systemets strømforsyningspænding registreres som for lav.
Løsning: Kontroller, om strømforsyningen er normal.
ERR054: Systemalarm
Årsag: Systemintern undtagelse.
Behandling: Kontakt venligst leverandøren.
ERR055: Nødstopalarm
Årsag: Det er registreret, at nødstopknappen er trykket ind.
Løsning: Kontroller, om nødstopknappen er trykket ind.
ERR056: Inden for drejningsmomentgrænsen
Årsag: Det maksimale drejningsmoment for motoren er overskredet.
Løsning: Kontroller, om y-aksens hastighed eller acceleration er indstillet for højt.
ERR057: Afstanden mellem Z1 og Z2 er for lille
Årsag: z-aksen ved manuel kontrolbevægelse i manuel kontroltilstand overskrider sikkerhedsafstanden i systemparameter 603: z1z2.
Løsning: Kontroller, om de af systemparametrene indstillede værdier er passende.
ERR059: Forsinkelsesadvarsel
Årsag: Systemets brugbare tid er mindre end 2 dage.
Løsning: Kontakt leverandøren.
ERR060: Baggeart 2 overskrider negativ softgrænse
Årsag: Når baggeart 2 bruges, overskrides maskinens x-aksekoordinat den negative softgrænseposition for x-aksen, som er indstillet i systemparameteren.
Løsning: Kontroller, om baggearten er valgt på passende vis.
ERR061: Sikkerhedsdør-alarm
Årsag: Sikkerhedsdøren blev åbnet under brug.
Løsning: Kontroller, om sikkerhedsdøren er lukket.
ERR062: Klimaanlægsalarm
Årsag: Køleanlægget fungerer ikke.
Løsning: Kontroller køleanlægget.
ERR063: Timeout for afbøjningskompensation
Årsag: Afbøjningskompensationen kan ikke fuldføres over en længere periode.
Løsning: Kontroller, om nøjagtigheden for afbøjningskompensation er indstillet for lavt.
ERR064: Fejl i retning for afbøjningskompensation
Årsag: Forkert rotationsretning for motoren til afbøjningskompensation.
Løsning: Kontroller, om tilslutningen af motoren til afbøjningskompensation er korrekt.
ERR065: Nødstopalarm 1
Årsag: Indgangssignalet til nødstopalarm 1 er gyldigt.
Løsning: Kontroller indgangssignalet til nødstopalarm 1.
ET-seriens alarm – Alarmkode
ALM001-ALM006 X-Z2-akse: Fejl ved søgning efter nulpunkt
Årsag: Systemet registrerer ikke nulpunktsignalet for den pågældende akse under søgningen, eller nulpunktskoordinaterne for den pågældende akse er indstillet forkert.
Løsning: Kontroller, om søgeafstanden for den tredje sektion af den pågældende akse i systemparametrene er mindre end én pitch. Kontroller også nulpunktskoordinaterne for den pågældende akse.
ALM007-ALM011 X-Z2-akse: Overskridelse af positiv hård grænse
Årsag: Den positive grænsekontakt for den pågældende aksel aktiveres i manuel tilstand.
Løsning: Kontroller, om den pågældende aksel bevæger sig ind i området for den positive grænsekontakt, eller om den positive grænsekontakt for aksen er defekt. Flyt den pågældende akse i det manuelle kontrolgrænseflade for at forlade området for grænsekontakten.
ALM012-ALM016 X-Z1-akse: Overskridelse af negativ hård grænse
Årsag: Den negative grænsekontakt for den pågældende aksel aktiveres i manuel tilstand.
Løsning: Kontroller, om den tilsvarende akse bevæger sig ind i området for den negative grænsekontakt, eller om den negative grænsekontakt for aksen er defekt. Flyt den tilsvarende akse i manuel kontrolgrænseflade for at forlade grænsekontaktområdet.
ALM017-ALM021 X-Z2-akse – over positiv softwaregrænse
Årsag: Den positive softwaregrænse for den tilsvarende akse er aktiveret i manuel tilstand.
Løsning: Flyt den tilsvarende akse i manuel kontrolgrænseflade for at forlade softwaregrænsen, og kontroller, om indstillingen af softwaregrænsen i systemparametrene er korrekt.
ALM022-ALM026 X-Z1-akse – over negativ softwaregrænse
Årsag: Den negative softwaregrænse for den tilsvarende akse er aktiveret i manuel tilstand.
Løsning: Flyt den tilsvarende akse i manuel kontrolgrænseflade for at forlade softwaregrænsen, og kontroller, om indstillingen af softwaregrænsen i systemparametrene er korrekt.
ALM027 Positionafvigelse for Y1- og Y2-akserne overskrider grænsen
Årsag: Afvigelsen i absolutte koordinatværdier for Y1- og Y2-akserne overskrider den maksimale tilladte afvigelsesværdi for Y-aksen i manuel tilstand.
Behandling: Kontroller, om positionfejlen for Y1- og Y2-akserne er uden for tolerancegrænsen; verificer, om den lineære encoder er ugyldig; kontroller den mekaniske transmission for fejl. Bevæg Y1 og Y2 i en retning, der reducerer aksial positionafvigelsen.
ALM028–ALM033 X–Z2-aksens nulpunktsafvigelse overskrider grænsen
Årsag: I referencepunktstilstanden afviger maskinens koordinatværdi for den pågældende akse efter nulpunktssøgning markant fra den værdi, der er registreret i systemparametrene 260–263, 608–609.
Behandling: Kontroller, om systemparametrene 260–263, 608–609 er indstillet korrekt.
ALM034 Advarsel fra smørepumpe
Årsag: Udgangstrykket fra smørepumpen er utilstrækkeligt.
Behandling: Kontroller, om smørefettet er brugt op. Hvis ja, tilføj smørefedt type Nr. 00 med ekstrem tryk og lithiumbase. Hvis ikke, kontroller, om smørepumpen fungerer normalt, om smøreslangerne lækker, og om signalkablet til smørepumpen er korrekt tilsluttet.
ALM035 Værktøj er ikke spændt
Årsag: Ingen spændesignal fra hydraulisk værktøjsholder registreres.
Løsning: Kontroller, om spændesignalkablet til den hydrauliske værktøjsholder er korrekt tilsluttet.
ALM036 ZLZ2 Afstand for lille
Årsag: Z-aksen i manuel kontroltilstand overskrider sikkerhedsafstanden angivet i systemparameter 603: z1z2.
Løsning: Kontroller, om de af systemparametrene indstillede værdier er korrekte.
ALM037 Advarsel om sikkerhedslysgitter
Årsag: Signalet fra lysgitteret registreres som gyldigt.
Løsning: Kontroller, om lysgitteret er blokeret.
ALM038 Udløbet advarsel
Årsag: Systemets brugbare tid er mindre end 2 dage.
Løsning: Kontakt leverandøren.
ALM039 Positiv grænse for udbøjningskompensation
Årsag: Afbøjningskompensationsmekanismen overskrider den positive grænse.
Løsning: Kontroller bevægelsesretningen for afbøjningskompensationsmekanismen samt om grænsesignalkoblingen er korrekt.
ALM040 Afbøjningskompensation – negativ grænse
Årsag: Afbøjningskompensationsmekanismen overskrider den negative grænse.
Løsning: Kontroller bevægelsesretningen for afbøjningskompensationsmekanismen samt om grænsesignalkoblingen er korrekt.
ALM041 Afbøjningskompensation
Årsag: Advarsel ved afbøjningskompensation.
Løsning: Kontroller, om indstillingen af afbøjningskompensationspræcisionen er for lille.
ALM042 Y-akse-kantning
Årsag: Indgangssignalet for Y-akse-kantning er aktivt.
Løsning: Kontroller, om Y1 og Y2 er parallelle, og om nulpunktindstillingen er korrekt.
Konklusion
Sammenfattende set ligger nøglen til hurtig fejlfinding af støbeformalarmer i ET-serien i at mestre de centrale trin til effektiv identificering og løsning af almindelige fejl. Ved at følge de procedurer, der er beskrevet i denne artikel – såsom kontrol af ledningsforbindelser, kalibrering af systemparametre og udførelse af rutinemæssig vedligeholdelse – kan du minimere standstilstande og sikre produktionseffektiviteten.
For yderligere hjælp eller mere detaljeret teknisk information kan du endvidere kontakte vores tekniske supportteam, JUGAO CNC MACHINE. Vi står klar til at give dig professionel rådgivning og yderligere ressourcer for at hjælpe dig med at bruge vores produkter mere effektivt. Du kan også konsultere vores andre tekniske dokumenter for yderligere information om vedligeholdelse af bøjemaskiner og optimering af deres ydeevne.

