















































Optimal driftsvejledning for DELEM DA53T/DA58T Z-akse-controller
Optimal driftsvejledning for DELEM DA53T/DA58T Z-akse-controller
Forkert konfiguration af DELEM DA53T/DA58T Z-akse-controller kan alvorligt påvirke den operative effektivitet af bøjemaskiner. Denne omfattende vejledning beskriver korrekt indstilling og driftsmetoder for Z-akse-controlleren, med målet at hjælpe operatører med at opnå glat og præcist bøje af plader ved at mestre dets kernefunktioner og konfigurationsprocesser.
DELEM DA53T/DA58T Z-akse-controlleren er en dedikeret styrekompont, der er udviklet til DELEM DA53T/DA58T CNC-systemet. Den er integreret med Schneider Easy Harmony-touchscreen og Schneider TM200 PLC, hvilket opgraderer DA53T/DA58T-systemet til at understøtte 6+1-akse-styring og betydeligt forbedrer systemets driftsmæssige fleksibilitet og præcision. Den anvendte touchscreen-model er HMIET6401, udstyret med en 7-toms display med en opløsning på 800 × 480 pixel og en TFT-LCD-skærm med 16 millioner farver til klar og intuitiv betjening.

1. Grundlæggende oversigt over Z-akse-controllerens funktion
For DELEM DA5XT-seriens systemer (herunder DA53T/DA58T) kan Z-aksen styres både i én-trins- og flertrins-programmeringsmodus – ligesom X- og R-aksen kan Z-aksens styremåde frit tilpasses på DA5XT-systemet.
De centrale trin ved programmering af Z-aksen er som følger:
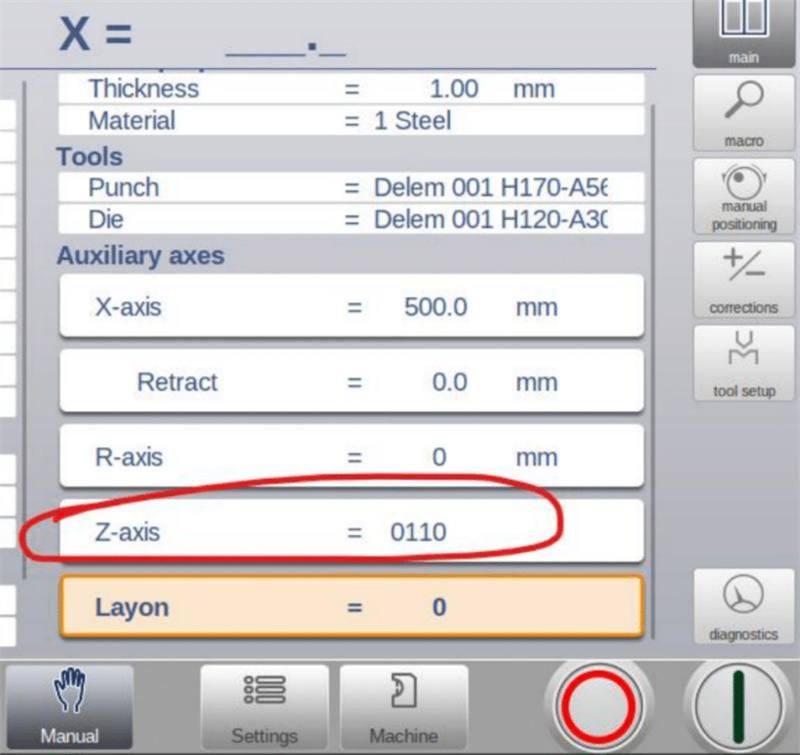
1. Indtast de præcise Z-akse-programmeringskoordinater på JUGAO-touchskærmen ud fra den faktiske pladetykkelse og stansens placering;
2. Tildel en unik Z-akse-ID til hver programmeringstrin på DA5XT-systemet (ID-værdien er i binær format med et konfigurerbart interval fra 0000 til 1111).
Både enkelttrins- og flertrins-Z-akse-driftstilstande understøtter vilkårlig indstilling af Z-akse-ID-værdier inden for det binære interval 0000–1111, og systemet giver visuelle driftseksempler for begge tilstande for at lette operatørens forståelse og håndtering.
2. Detaljeret betjening på JUGAO-touchskærmen
JUGAO-touchskærmen er den centrale menneske-maskine-grænseflade til manuel og automatisk Z-akse-drift, med tydelig og adskilt betjeningslogik for forskellige driftstilstande samt dedikerede håndteringsmetoder til fejlsituationer og daglig kalibrering.
2.1 Manuel betjeningsmetode
Manuel betjening af Z-aksen er kun tilgængelig, når det angivne ikon for manuel betjening vises på touchskærmen; hvis ikonet ikke vises, er manuel kontrol deaktiveret.
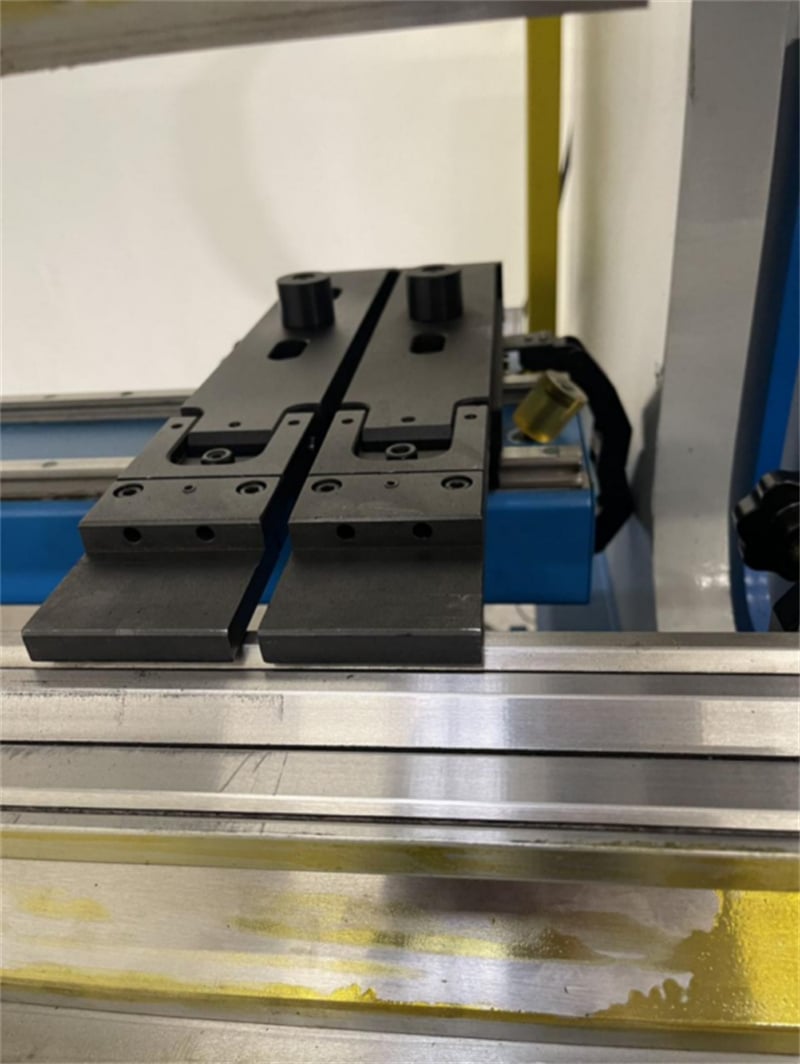
• Tryk på fremad-kontroltasten for at køre Z1 eller Z2 i retning af stigende positionsværdi (Y1-siden svarer til positionen med den mindste Z-akse-værdi, og Y2-siden svarer til positionen med den største Z-akse-værdi);
• Tryk på tilbage-kontroltasten for at køre Z1 eller Z2 i retning af faldende positionsværdi, og bevægelsen stopper øjeblikkeligt, når tasten slippes;
• Skift mellem Z1 og Z2: Tryk på aksevalgtasten, og Z2 vises i blå farve, hvilket indikerer, at Z2 er i tilstanden for manuel betjening; tryk igen på tasten, så skifter Z2 tilbage til sort, og den manuelle betjeningsret skifter tilbage til Z1.
2.2 Automatisk betjeningsmetode
Automatisk betjening af Z-aksen aktiveres via den dedikerede automatisk-start-tast på JUGAO-touchskærmen, efter en forudgående kontrol af udstyrets tilstand:
• Hvis oliepumpen på bøjen ikke er startet, vil skærmen anmode operatøren om at starte oliepumpen først;
• Hvis oliepumpen er i normal driftstilstand, vil tryk på knappen til automatisk start få Z-aksen til at bevæge sig til den forudindstillede position svarende til Id0000;
• Tryk på den dedikerede stop-knap på skærmen til ethvert tidspunkt for at standse Z-aksens automatisk bevægelse øjeblikkeligt.
2.3 Håndtering af fejl ved kollision
I tilfælde af kollision mellem stopfingrene for Z1 og Z2 under driften skal fejlen håndteres i følgende rækkefølge:
1. Kontroller først, om Z-aksens drivmodul viser en alarm; hvis en alarm er aktiveret, sluk for strømmen til drivmodulet og genstart det for at nulstille alarmerne;
2. Udfør kalibreringsoperationen "undervisning" for både Z1- og Z2-aksen;
3. Indtast de faktiske nuværende præcise positionsværdier for Z1 og Z2 på touchskærmen, og efter bekræftelse kan systemet genoptage normale efterfølgende operationer.
2.4 Nøglekrav til Z-akse-indlæring (kalibrering)
Korrekt Z-akse-indlæring (kalibrering) er den grundlæggende forudsætning for normal og præcis drift af hele Z-akse-styringen, og denne handling skal udføres i følgende scenarier:
1. Den første prøvekørsel og idriftsættelse af en ny bøjemaskine udstyret med DA53T/DA58T Z-akse-styring;
2. Enhver utilsigtet sammenstød mellem Z-akse-stopfingre eller andre unormale mekaniske påvirkninger på Z-aksen.
Det er vigtigt at bemærke, at Z-akse-styringen har en strømudfaldshukommelsesfunktion: De kalibrerede Z-akse-positioner gemmes automatisk af systemet. Efter at udstyret er slukket og genstartet, behøver operatøren ikke at gentage indlærings- (kalibrerings-)operationen, og systemet kan direkte anvende de gemte parametre til driften.

