















































Řešení potíží s poruchami servosystému hydraulického ohýbacího stroje: Komplexní průvodce
Komplexní průvodce
Obsah
1. Identifikace běžných poruch servosystému ohýbacího lisu
1.1 Typické režimy servopoplachů v CNC ohýbacích lisech
2. Postupné diagnostické kroky při poruchách servosystému ohýbacího lisu
2.1 Zkontrolujte kódy poplachů servopohonu
2.2 Prozkoumejte zapojení a rozhraní připojení servomotoru
2.3 Ověřte zpětnovazební signály enkodéru
3. Mechanické příčiny poruch servosystému ohýbacího lisu
3.1 Třecí odpor v lineárních vodítkách zadního polohovacího zařízení
3.2 Nesouosost kuličkových šroubů
4. Chyby servoparametrů a chyby kalibrace
4.1 Problémy s nastavením servoparametrů
4.2 Odchylky kalibrace polohy zádržného úhelníku
5. Preventivní strategie ke zmírnění poruch servosystému
5.1 Plánované elektrické prohlídky
5.2 Mazání a mechanická údržba
5.3 Sledování teploty a zatížení servomotoru v reálném čase
6. Často kladené otázky
6.1 Jaké jsou nejčastější příčiny poruch servosystému ohraňovacího stroje?
6.2 Může mechanický odpor vyvolat servový poplach?
6.3 Jaký je nejrychlejší způsob diagnostiky poruchy servosystému?
6.4 Jak často by měl být servosystém CNC ohraňovacího lisu kontrolován?
7. Závěr
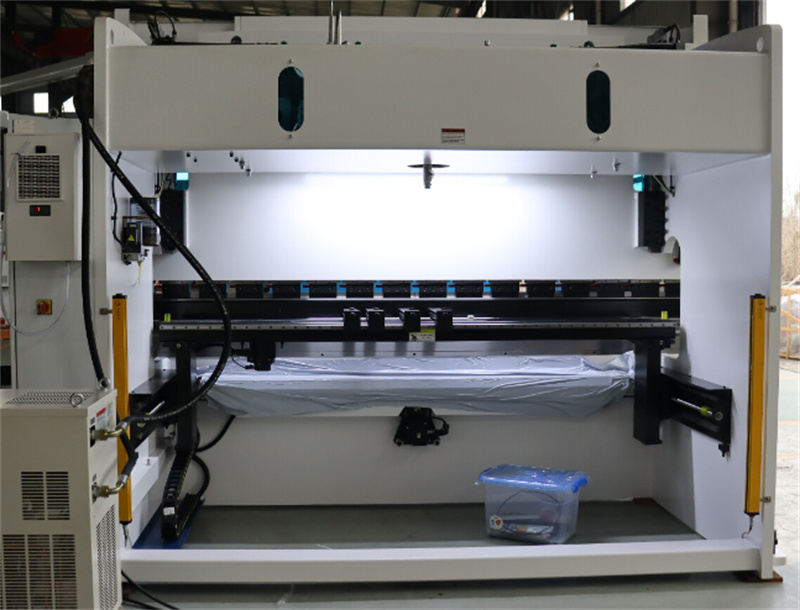
Když operátoři CNC ohraňovacích lisů JUGAO narazí na poruchu servosystému, výroba okamžitě ustane a mnozí mají potíže s tím, kde začít odstraňování závad. Na základě rozsáhlých praktických zkušeností s CNC ohraňovacími lisy vyplývá, že většina servosystémových poplachů má za sebou jednoduché příčiny – například poruchy enkodérů, problémy s přívodem vodičů, nesprávné servoparametry nebo nadměrný mechanický odpor. Tento průvodce popisuje systematický, postupný přístup k diagnostice a odstraňování poruch servosystému ohraňovacího lisu, který umožňuje operátorům rychle obnovit funkčnost stroje a zároveň zachovat přesné polohování a stabilitu servomotoru.
Identifikace běžných poruch servosystému ohraňovacího lisu
Než začnete s jakýmkoli opravám, je prvním kritickým krokem přesné určení konkrétního typu poruchy servomotoru, který je na řídícím systému CNC indikován. Moderní ohraňovací lisy využívají servomotory především ke dvěma základním funkcím: pohonu systému zadního dorazu a řízení hydraulické synchronizace.
Typické režimy servopoplachů u CNC ohraňovacích lisů
Mezi nejčastější servopoplachy související s poruchami systému ohraňovacího lisu patří:
• Poplach přetížení servomotoru
• Poruchy komunikace s enkodérem
• Poplach odchylky polohy
• Přehřátí servopohonu
• Proudová ochrana servomotoru proti přetížení
Každý typ poplachu ukazuje na jinou podkladovou příčinu. Správná interpretace kódů poplachů zobrazených na běžných řídících systémech (včetně systémů Delem, ESA a Cybelec) je klíčová pro efektivní diagnostiku a vyhnutí se zbytečným kontrolám.
Postupný diagnostický postup při poruchách servosystému ohraňovacího lisu
Řešení problémů se servosystémy vyžaduje strukturovaný přístup, aby se zabránilo zbytečné výměně komponent a minimalizovalo prostoje.
2.1 Zkontrolujte kódy poplachů servopohonu

Prvním krokem je zkontrolovat chybové hlášení zobrazené jak na panelu servopohonu, tak na řídicím systému CNC. Většina servopohonů je vybavena podrobnými diagnostickými kódy, které poskytují klíčové informace o poruše. Je nezbytné zaznamenat tři základní údaje:
• Konkrétní číslo chybového kódu
• Provozní stav stroje v okamžiku výskytu chyby (např. nečinnost, ohýbání, nastavení zpětného měřítka)
• Postižená osa (např. osa X – zpětné měřítko, osa R – nastavení výšky)
Toto zaznamenání okamžitě pomůže určit, zda má porucha elektrickou, mechanickou povahu nebo zda je způsobena nesprávnou konfigurací parametrů.
2.2 Prozkoumejte zapojení a rozhraní připojení servomotoru

Nepřipevněné nebo poškozené kabely patří mezi nejčastější příčiny poruch servosystému ohýbacího lisu. Důkladní prohlídka by měla zahrnovat:
• Napájecí kabely servomotoru
• Kabely zpětné vazby enkodéru
• Svorkovnice v elektrické řídicí skříni
Průběžné vibrace stroje během dlouhodobého provozu mohou postupně uvolnit konektory a svorky. Jednoduché dotažení uvolněných spojů a výměna ošoupaných nebo poškozených kabelů často odstraní dočasné servoporušení, které je jinak obtížné lokalizovat.
2.3 Ověřte zpětnovazební signály enkodéru
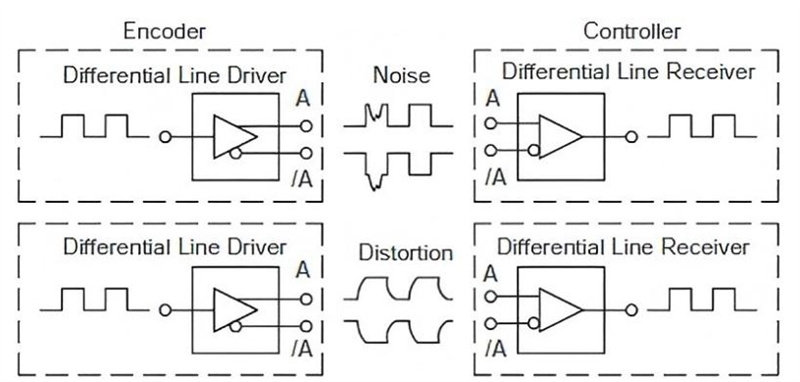
Servomotory závisí na přesné zpětné vazbě enkodéru, aby udržely vysokou přesnost polohování vyžadovanou pro provoz ohýbacího lisu. Nestabilní signály enkodéru vyvolají řadu poruch, včetně:
• Poplach odchylky polohy
• Chyb synchronizace os
• Náhlých, neplánovaných vypnutí servomotoru
Chcete-li diagnostikovat problémy s enkodérem, zkontrolujte všechna připojení enkodéru na utažení a zkontrolujte kabely na přítomnost olejové kontaminace, opotřebení nebo jiného mechanického poškození. Pokud vizuální kontrola neposkytne žádné stopy, použijte integrované diagnostické menu servopohonu ke spuštění testu signálu a ověření funkčnosti enkodéru.
Mechanické příčiny poruch servosystému ohýbacího lisu
Ne všechny poruchy servosystému mají elektrickou povahu – nadměrný mechanický odpor je běžnou a často podceňovanou příčinou aktivace servopoplachů. Vyřešení mechanických problémů je klíčové pro obnovení normálního provozu servopohonu a zabránění opakujícím se poruchám.
3.1 Třecí odpor v lineárních vodítkách zadního polohovacího zařízení
Lineární vodící lišty zadního dorazu jsou během každodenního provozu náchylné k hromadění prachu, kovových třísek a nečistot; nedostatečné mazání tento problém zhoršuje. Pokud se odpor zvyšuje, musí servomotor vyvinout větší sílu pro posun osy zadního dorazu, což často vyvolá:
• Poplach přetížení servomotoru
• Neobvyklé přehřívání servomotoru
• Pomalou rychlost polohování zadního dorazu
Důkladné vyčištění vodítek pro odstranění veškerého nečistoty a aplikace výrobcem doporučeného maziva na kuličkové šrouby a součásti vodítek výrazně snižuje třecí odpor a obnovuje normální provozní stav servosystému.
3.2 Nesouosost kuličkových šroubů
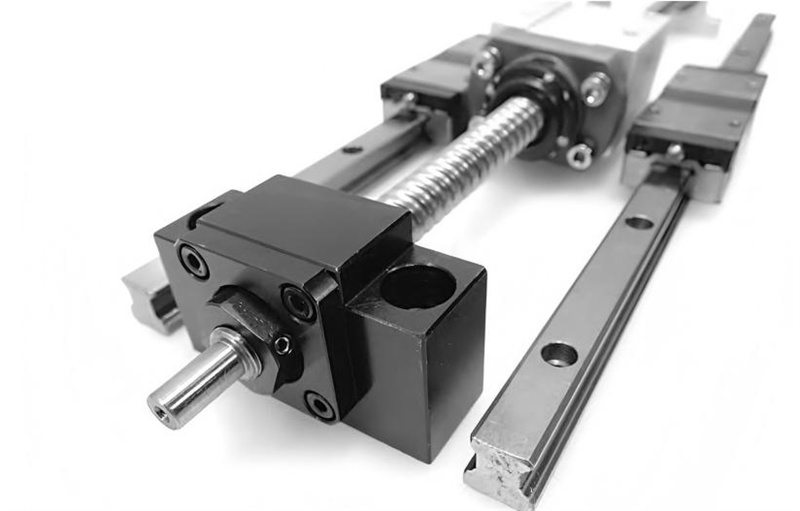
Nesprávná instalace během nastavení stroje nebo opotřebení způsobené dlouhodobým používáním mohou způsobit nesouosost kuličkového šroubu – další hlavní zdroj mechanického odporu. K diagnostice tohoto problému zkontrolujte následující klíčové komponenty:
• Přímočarost samotného kuličkového šroubu
• Souosost spojky, která spojuje servomotor s kuličkovým šroubem
• Úroveň opotřebení ložisek na obou koncích kuličkového šroubu
Oprava nesouososti kuličkového šroubu a výměna opotřebovaných ložisek eliminují nadměrné zatížení servomotoru, čímž se zabrání překročení zátěže a prodlouží se životnost motoru.
Chyby servoparametrů a chyby kalibrace
Nesprávné konfigurace parametrů servopohonu jsou hlavní příčinou poruch servosystému ohýbacího lisu, zejména po údržbě stroje, výměně komponentů nebo aktualizaci softwaru CNC. I nepatrné odchylky od doporučených parametrů mohou narušit celý servosystém.
4.1 Problémy s nastavením servoparametrů
Nesprávně nastavené parametry související se zrychlením, limitními rychlostmi nebo tolerancí polohy okamžitě vyvolají servopoplachy a brzdí provoz stroje. Klíčové parametry, které je třeba ověřit a znovu kalibrovat, zahrnují:
• Parametry servozesílení
• Nastavení zrychlení a zpomalení
• Prahové hodnoty tolerance odchylky polohy
Všechny parametry musí být nastaveny přesně na hodnoty doporučené výrobcem ohýbacího lisu, aby byl zajištěn bezproblémový provoz servosystému.
4.2 Odchylky kalibrace polohy zádržného úhelníku

Pokud se referenční bod polohy zádržného zařízení stane nepřesným kvůli mechanickému pohybu nebo elektrickým poruchám, řídící jednotka CNC detekuje abnormální odchylku polohy a spustí poplach. K vyřešení tohoto problému proveďte kompletní kalibrační proces, který zahrnuje:
• Kalibraci domovské polohy osy za účelem obnovení nulového bodu
• Úplné obnovení referenční polohy zádržného zařízení
• Ověření přesnosti polohy pomocí přesných měřicích nástrojů
Správná kalibrace zajistí, že servosystém pracuje v rámci tolerančního rozsahu stanoveného výrobcem, čímž se eliminují falešné poplachy způsobené odchylkou polohy.
Preventivní strategie pro minimalizaci poruch servosystému
Prevence poruch servosystému ohraňovacího lisu je mnohem účinnější a nákladově efektivnější než jejich oprava během neplánované výrobní prostojové doby. Implementace proaktivního programu preventivní údržby je nejlepší způsob, jak zaručit dlouhodobou stabilitu servosystému.
5.1 Plánované elektrické prohlídky
Pravidelné prohlídky elektrické řídicí skříně a elektrických komponentů servosystému jsou nezbytné. Zaměřte se na zajištění:
• Nepřekáženého a účinného chlazení servopohonu
• Čistých větracích filtrů, aby nedocházelo k ukládání prachu
• Bezpečných a pevných spojů všech elektrických svorkovnic a kabelů
Nános prachu v řídicí skříni může způsobit přehřátí a nestabilitu komunikace, což vede k dočasným nebo trvalým poruchám servopohonu. Doporučují se týdenní vizuální prohlídky a měsíční důkladné čištění.
5.2 Mazání a mechanická údržba
Správné mazání všech pohyblivých mechanických komponentů výrazně snižuje zátěž servomotoru a brání nadměrnému opotřebení. Mezi základní úkoly údržby patří:
• Pravidelné čištění kuličkových šroubů od nečistot
• Plánované mazání lineárních vodítek vhodným mazivem
• Okamžité odstranění kovových třísek a nečistot ze všech pohyblivých částí zadního měřidla a ohybového systému
Tato pravidelná údržba eliminuje nadměrné mechanické zatížení servosystému a snižuje riziko přetížení a poplachů způsobených přehřátím.
5.3 Sledování teploty a zatížení servomotoru v reálném čase
Téměř všechny moderní řídicí jednotky CNC ohraňovacích lisy nabízejí funkci sledování v reálném čase teploty servomotoru a úrovně zatížení. Obsluha i údržbářské týmy by měly tyto ukazatele pravidelně kontrolovat; jakékoli neobvyklé či náhlé zvýšení teploty nebo zatížení signalizuje potenciální problém (např. mechanický odpor, poruchy v zapojení).
Okamžité prošetření a odstranění těchto varovných signálů brání tomu, aby se drobné problémy vyvinuly v závažné poruchy servosystému a nepředvídané výpadky výroby.
Nejčastější dotazy
6.1 Jaké jsou nejčastější příčiny poruch servosystému ohraňovacího stroje?
Na základě praktických zkušeností z průmyslu jsou tři nejčastější příčiny: povolené kabely zpětné vazby enkodéru, nedostatečné mazání mechanických součástí zadního polohovacího zařízení (backgauge) a nesprávné nastavení servoparametrů. Tyto tři problémy způsobují většinu servopoplachů během každodenního provozu.
6.2 Může mechanický odpor vyvolat servový poplach?
Ano, mechanický odpor je hlavním spouštěčem servopohonných poplachů. Pokud se kuličkové šrouby, lineární vodící dráhy nebo jiné pohyblivé komponenty zašpiní, deformují nebo opotřebí, je nutné servomotor provozovat za nadměrné zátěže. Tato nadměrná zátěž přímo vyvolává poplach přetížení servopohonu a může také způsobit sekundární problémy, jako je přehřívání motoru.
6.3 Jaký je nejrychlejší způsob diagnostiky poruchy servosystému?
Začněte záznamem a interpretací kódu poplachu servopohonu – jedná se o nejdůležitější krok pro zúžení možných příčin poruchy. Poté zkontrolujte veškeré přívodní vodiče a spoje enkodéru na uvolnění nebo poškození a dále zkontrolujte, zda v dotčené ose není nadměrný mechanický odpor. Servoparametry upravujte pouze poté, co jste vyloučili elektrické i mechanické poruchy, abyste se vyhnuli zbytečným změnám parametrů.
6.4 Jak často by měl být servosystém CNC ohraňovacího lisu kontrolován?
Pro běžné výrobní prostředí se doporučuje základní vizuální kontrola servosystému (včetně zapojení, připojení a čistoty mechanických komponentů) jednou týdně. Komplexnější preventivní údržbová kontrola – včetně mazání, testování signálů enkodéru, ověření parametrů a kalibrace teplotních/zatěžovacích senzorů – by měla být prováděna měsíčně.
Závěr
Poruchy servosystému ohraňovacího lisu mohou narušit výrobní plány a ohrozit přesnost operací ohýbání kovů, avšak většina těchto problémů lze rychle a účinně vyřešit pomocí strukturovaného, postupného přístupu k odstraňování závad. Tím, že operátoři a údržbáři nejprve interpretují servopoplachové kódy, poté zkontrolují zapojení a zpětnovazební signály enkodéru, odstraní nadměrný mechanický odpor a ověří konfiguraci servoparametrů, mohou přesně identifikovat a odstranit většinu poruch s minimálním výpadkem provozu.
Proaktivní a pravidelná preventivní údržba je základem dlouhodobé stability a spolehlivosti servosystémů. Dodržováním plánovaných elektrických kontrol, pravidelného mechanického mazání a údržby, stejně jako sledování teploty a zatížení servomotoru v reálném čase, mohou podniky výrazně snížit frekvenci poruch servomotorů a zajistit hladký chod ohybacích strojů JUGAO. Pokud dojde k trvalým nebo složitým problémům se servosystémem, které nelze vyřešit pomocí základních postupů odstraňování potíží, doporučuje se konzultovat profesionální tým technické podpory, aby byla zajištěna přesná diagnostika a účinné řešení, čímž se minimalizují ztráty výroby a chrání se dlouhodobý výkon stroje.

